Вам также может понравиться
- Chapt 07 Lect03Документ5 страницChapt 07 Lect03Shanmukha SundaramОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Chapt 07 Lect02Документ4 страницыChapt 07 Lect02Shanmukha SundaramОценок пока нет
- Chapt 05 Lect02Документ9 страницChapt 05 Lect02Shanmukha SundaramОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Chapt 06 Lect03Документ6 страницChapt 06 Lect03Shanmukha SundaramОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
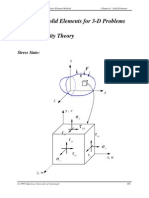
- Chapter 6. Solid Elements For 3-D Problems I. 3-D Elasticity TheoryДокумент6 страницChapter 6. Solid Elements For 3-D Problems I. 3-D Elasticity TheoryShanmukha SundaramОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Chapter 4. Finite Element Modeling and Solution TechniquesДокумент2 страницыChapter 4. Finite Element Modeling and Solution TechniquesShanmukha SundaramОценок пока нет
- IV. Nature of Finite Element Solutions: Stiffening EffectДокумент7 страницIV. Nature of Finite Element Solutions: Stiffening EffectShanmukha SundaramОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Mindlin Plate TheoryДокумент10 страницMindlin Plate TheoryKunal RanjaneОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Chapt 01 Lect04Документ5 страницChapt 01 Lect04Shanmukha SundaramОценок пока нет
- Chapt 01 Lect02Документ6 страницChapt 01 Lect02Shanmukha SundaramОценок пока нет
- Chapt 02 Lect07Документ3 страницыChapt 02 Lect07Shanmukha SundaramОценок пока нет
- Chapt 02 Lect06Документ7 страницChapt 02 Lect06Shanmukha SundaramОценок пока нет
- Heat ExchangerДокумент155 страницHeat ExchangerSajilal JosephОценок пока нет
- Chapt 02 Lect03Документ6 страницChapt 02 Lect03Shanmukha SundaramОценок пока нет
- Introduction To Finite Element Method - Chapt - 02 - Lect04Документ9 страницIntroduction To Finite Element Method - Chapt - 02 - Lect04Eng_2014Оценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Chapt 02 Lect02Документ6 страницChapt 02 Lect02Shanmukha SundaramОценок пока нет
- Chapt 02 Lect01Документ7 страницChapt 02 Lect01Shanmukha SundaramОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- Chapter-I Circulation and VorticityДокумент23 страницыChapter-I Circulation and VorticitydrsomenathduttaОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Griffiths Problems 02.25-26 PDFДокумент5 страницGriffiths Problems 02.25-26 PDFAjay PareekОценок пока нет
- ASSIGNMENT 2, Due Thursday, September 30: H VC OutДокумент1 страницаASSIGNMENT 2, Due Thursday, September 30: H VC OutZiyan WuОценок пока нет
- Lecture 04 Open Loop PTFДокумент8 страницLecture 04 Open Loop PTFTanjid HossainОценок пока нет
- Partial Differential EquationsДокумент45 страницPartial Differential EquationssafaatОценок пока нет
- Lagrange Interpolation HomeworkДокумент7 страницLagrange Interpolation HomeworkairaОценок пока нет
- Linear Programming ProblemДокумент13 страницLinear Programming Problemraj100% (1)
- TB ch2Документ58 страницTB ch2Wasiu BabsОценок пока нет
- Assignment-1-Differentiation-BUS 135Документ4 страницыAssignment-1-Differentiation-BUS 135Md. Shafiqul Haque Bhuiyan 1610552030Оценок пока нет
- Optimize project network analysis with PERT and CPMДокумент44 страницыOptimize project network analysis with PERT and CPMIshan JoshiОценок пока нет
- Forecasting Techniques and AccuracyДокумент26 страницForecasting Techniques and AccuracyRandyl ServanoОценок пока нет
- Quadratic InterpolationДокумент22 страницыQuadratic InterpolationMahdi HusseinОценок пока нет
- EE322M Quiz-1 SolutionДокумент6 страницEE322M Quiz-1 SolutionshubhamОценок пока нет
- Spreadsheet Modeling and Decision Analysis A Practical Introduction To Business Analytics 8th Edition Ragsdale Solutions ManualДокумент44 страницыSpreadsheet Modeling and Decision Analysis A Practical Introduction To Business Analytics 8th Edition Ragsdale Solutions ManualTrevor feignarddОценок пока нет
- Series of Real NumbersДокумент78 страницSeries of Real NumbersVijay ChhipaОценок пока нет
- Transactional Analysis - Ego StatesДокумент8 страницTransactional Analysis - Ego StatesaelenachОценок пока нет
- Partial Fraction Expansion Phương Pháp Thặng DưДокумент12 страницPartial Fraction Expansion Phương Pháp Thặng DưĐỗ Nhật HuyОценок пока нет
- Complete Metric Space: 1 SequenceДокумент44 страницыComplete Metric Space: 1 SequenceAvijit SamantaОценок пока нет
- Universidad de Las Fuerzas Armadas Espe: Fausto Granda GДокумент13 страницUniversidad de Las Fuerzas Armadas Espe: Fausto Granda GLuis Adrian CamachoОценок пока нет
- Introduction To Quantitative Analysis: Learning ObjectivesДокумент17 страницIntroduction To Quantitative Analysis: Learning ObjectivesAnas AljaghbeerОценок пока нет
- Unit 2 - Week 1: Assignment 01Документ3 страницыUnit 2 - Week 1: Assignment 01Saurabh0% (2)
- Correlation Learning Rule: M I I IДокумент33 страницыCorrelation Learning Rule: M I I IStefanescu AlexandruОценок пока нет
- Fundamentals of Grid GenerationДокумент1 страницаFundamentals of Grid GenerationNarayan KandelОценок пока нет
- Dynamic Risk Analysis: The Dynrisk Concept: InternetДокумент5 страницDynamic Risk Analysis: The Dynrisk Concept: InternetSam BliОценок пока нет
- M EI D y DX: Differential Equation For Elastic Curve of A BeamДокумент2 страницыM EI D y DX: Differential Equation For Elastic Curve of A BeamEntertainment , Enjoyment InformativeОценок пока нет
- The Role of N H P P Models in The Practical Analysis of Maintenance Failure DataДокумент8 страницThe Role of N H P P Models in The Practical Analysis of Maintenance Failure DataRoberto Cepeda CastelloОценок пока нет
- Ch09 Text BookДокумент54 страницыCh09 Text BookGosaye DesalegnОценок пока нет
- Sed Sci 321 Titrimetry AnalysisДокумент4 страницыSed Sci 321 Titrimetry AnalysisJei HernandezОценок пока нет
- M3 MCQsДокумент13 страницM3 MCQsvijju ajju100% (6)
- The Phase Retrieval ProblemДокумент6 страницThe Phase Retrieval Problemlol66790Оценок пока нет
- Math 21 Lec 1.5 IVT, Squeeze Theorem, Limits and Continuity of Trigonometric Functions (Slides) PDFДокумент29 страницMath 21 Lec 1.5 IVT, Squeeze Theorem, Limits and Continuity of Trigonometric Functions (Slides) PDFTherese SandovalОценок пока нет