Вам также может понравиться
- MIG-Most ImportantGraphДокумент1 страницаMIG-Most ImportantGraphHemant ChouhanОценок пока нет
- Aoa Office of The Prateek The Royal Cliff: (Crossing Republik, Ghaziabad, U.P.)Документ1 страницаAoa Office of The Prateek The Royal Cliff: (Crossing Republik, Ghaziabad, U.P.)Hemant ChouhanОценок пока нет
- Blast Leg IEDДокумент16 страницBlast Leg IEDHemant ChouhanОценок пока нет
- Santos2020 PDFДокумент11 страницSantos2020 PDFHemant ChouhanОценок пока нет
- Covid-19 Uv V20200312 PDFДокумент5 страницCovid-19 Uv V20200312 PDFHemant ChouhanОценок пока нет
- UV C Disinfection ProposalДокумент5 страницUV C Disinfection ProposalHemant ChouhanОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Investigation of Effective Permittivity and Permeability For A Novel V-Shaped Metamaterial Using Simulated S-ParametersДокумент4 страницыInvestigation of Effective Permittivity and Permeability For A Novel V-Shaped Metamaterial Using Simulated S-Parametersnaveen narulaОценок пока нет
- IM2654 Smart Electronic Materials: Piezoelectric Material and ApplicationsДокумент38 страницIM2654 Smart Electronic Materials: Piezoelectric Material and ApplicationsHtet Mrak AungОценок пока нет
- Design of Rectangular Water TankДокумент280 страницDesign of Rectangular Water TankNoppolNorasri95% (42)
- Astm A227Документ5 страницAstm A227Diganta KonerОценок пока нет
- Shaft DesignДокумент34 страницыShaft DesignSaad AhmedОценок пока нет
- Session 56: Theory of Non-Linear Analysis: ELEATION's ANSYS Basic To Professional Training ProgramДокумент11 страницSession 56: Theory of Non-Linear Analysis: ELEATION's ANSYS Basic To Professional Training ProgramrajuОценок пока нет
- The Surface/Bulk Micromachining (SBM) Process: A New Method For Fabricating Released MEMS in Single Crystal SiliconДокумент8 страницThe Surface/Bulk Micromachining (SBM) Process: A New Method For Fabricating Released MEMS in Single Crystal SiliconAnton JohnОценок пока нет
- A Literature Review On Design of Overhead Monorail CraneДокумент3 страницыA Literature Review On Design of Overhead Monorail CraneSuneesh PОценок пока нет
- WTC2005 63196 PDFДокумент2 страницыWTC2005 63196 PDFWaqar AhmedОценок пока нет
- Beam Web Connection DesignДокумент14 страницBeam Web Connection Designmanikandan4strlОценок пока нет
- Docslide - Us - Callister Concept Check AnswersДокумент58 страницDocslide - Us - Callister Concept Check AnswersJayant ChaudhariОценок пока нет
- Prestressed ConcreteДокумент123 страницыPrestressed ConcreteThien Mai100% (3)
- Failure AnalysisДокумент36 страницFailure Analysismaterialminded100% (2)
- Buckling of MicropilesДокумент4 страницыBuckling of MicropilesAnonymous qTP5oq7g100% (2)
- Bs5950 Calculation Decking SheetДокумент6 страницBs5950 Calculation Decking SheetKawser HossainОценок пока нет
- Chap 1 Thermodynamics Exercise PDFДокумент25 страницChap 1 Thermodynamics Exercise PDFRanveer GautamОценок пока нет
- Processo de Injecao em Molde Muito BomДокумент16 страницProcesso de Injecao em Molde Muito BomFabiano SchincariolОценок пока нет
- I Unit - Edc - MahiДокумент26 страницI Unit - Edc - Mahilucky jОценок пока нет
- Calculo de Barras - Pub 22 - OesДокумент136 страницCalculo de Barras - Pub 22 - OesOscar SchmüthОценок пока нет
- Mind Map Thermal AnalysisДокумент1 страницаMind Map Thermal Analysisizzah hadiОценок пока нет
- Hostacom X M2 U34 102942Документ2 страницыHostacom X M2 U34 102942JonathanChávezОценок пока нет
- Lec14 PDFДокумент18 страницLec14 PDFRohan sharmaОценок пока нет
- Design and Analysis of Form Tool: Bikumalla Sruthi M Anil KumarДокумент12 страницDesign and Analysis of Form Tool: Bikumalla Sruthi M Anil KumarNguyễn Hữu PhấnОценок пока нет
- Chapter 6 - Stress and Strain TransformationДокумент56 страницChapter 6 - Stress and Strain TransformationTomorrow PavingОценок пока нет
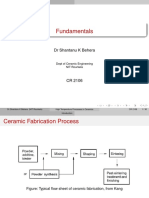
- Fundamentals: DR Shantanu K BeheraДокумент30 страницFundamentals: DR Shantanu K Beheravishal jaiswalОценок пока нет
- BooksДокумент6 страницBooksJenmey NgОценок пока нет
- Caveability: Fundamentals of Block Caving Geomechanics June 21-25 2010Документ57 страницCaveability: Fundamentals of Block Caving Geomechanics June 21-25 2010Michael AltamiranoОценок пока нет
- Aisi 4340 Alloy Steel (Uns g43400)Документ4 страницыAisi 4340 Alloy Steel (Uns g43400)LamhotFernandoSihombingОценок пока нет
- TorsionДокумент21 страницаTorsionhaikalОценок пока нет