Вам также может понравиться
- Desarrollo y Control de Un Pendulo de FurutaДокумент7 страницDesarrollo y Control de Un Pendulo de FurutaHugo Junior Quispe ChaconОценок пока нет
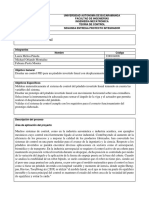
- Control de Posicion Angular de Un Helicoptero de 1 GDLДокумент15 страницControl de Posicion Angular de Un Helicoptero de 1 GDLeduardoguidoОценок пока нет
- Informe Robot BalancinДокумент7 страницInforme Robot BalancinDaniel Piña100% (2)
- Control de Velocidad Banda Transportadora HILДокумент13 страницControl de Velocidad Banda Transportadora HILRonald PuchaОценок пока нет
- Primer Avance-Control Helicóptero-Grupo 15Документ10 страницPrimer Avance-Control Helicóptero-Grupo 15carlos levano hernandezОценок пока нет
- Informe Pendulo InvertidoДокумент20 страницInforme Pendulo InvertidoÁngelFabrizzioLuciánVillavicencioRoqueОценок пока нет
- Capitulo IVДокумент56 страницCapitulo IVEdwin Alexander Duran ParraОценок пока нет
- Paper Proyecto Control ModernoДокумент7 страницPaper Proyecto Control ModernoFernando MendezОценок пока нет
- Aplicaciones Control PD PidДокумент10 страницAplicaciones Control PD PidMarco Andres Cisneros VargasОценок пока нет
- Pendulo InvertidoДокумент131 страницаPendulo InvertidoMILTON CABRERAОценок пока нет
- Modelamiento DronДокумент7 страницModelamiento DronSantiago ChavezОценок пока нет
- Control Pid de Péndulo InvertidoДокумент8 страницControl Pid de Péndulo InvertidoPollux SpicaОценок пока нет
- Analisis Sistema de Control CuadricopteroДокумент15 страницAnalisis Sistema de Control CuadricopteroCamiGarcíaSantillánОценок пока нет
- Plantilla Reporte Electricidad y Magnetismo Ind 2022Документ5 страницPlantilla Reporte Electricidad y Magnetismo Ind 2022Acosta Castillo Ximena AraceliОценок пока нет
- Péndulo InvertidoДокумент23 страницыPéndulo InvertidoSuco GuerreroОценок пока нет
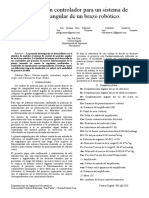
- Diseño de Un Controlador para Un Sistema de Posición AngularДокумент21 страницаDiseño de Un Controlador para Un Sistema de Posición AngularJoel JalezОценок пока нет
- Reporte Del Pendulo Invertido - Erik Zamora GomezДокумент9 страницReporte Del Pendulo Invertido - Erik Zamora GomezFausto Moon EspartaОценок пока нет
- Informe PenduloДокумент11 страницInforme PenduloTelmo GuamanОценок пока нет
- Proyecto Final - Equipo 2Документ15 страницProyecto Final - Equipo 2José Arturo Larralde ChilpaОценок пока нет
- Control de Posicion de Un Balancin Con AДокумент6 страницControl de Posicion de Un Balancin Con AMiguel El BarbaroОценок пока нет
- Informe Final Proyecto SCA-Grupo 4Документ25 страницInforme Final Proyecto SCA-Grupo 4anthony tobar quezadaОценок пока нет
- Torque GiroscópicoДокумент13 страницTorque GiroscópicoRodrigo VelásteguiОценок пока нет
- Análisis de la ventaja mecánica y relación de tiempos en mecanismosДокумент17 страницAnálisis de la ventaja mecánica y relación de tiempos en mecanismosMarckuz MendietaОценок пока нет
- PROYECTOS Finales 2013 Control-Analogico IДокумент17 страницPROYECTOS Finales 2013 Control-Analogico IXavier ContrerasОценок пока нет
- Modelado Matemático de Motor de Imanes PermanenteДокумент14 страницModelado Matemático de Motor de Imanes Permanentefenix rojoОценок пока нет
- Control de Un Péndulo de Furuta en Modo GrúaДокумент6 страницControl de Un Péndulo de Furuta en Modo Grúakarlosandres82Оценок пока нет
- Modelo matemático de suspensión de vehículoДокумент9 страницModelo matemático de suspensión de vehículoLenny Rayssa Huayllas CalaniОценок пока нет
- Diseño MBC Working ModelДокумент9 страницDiseño MBC Working ModelomarrsshhОценок пока нет
- Adrián-Sara-Waira Informe RevisadoДокумент25 страницAdrián-Sara-Waira Informe Revisadojuiiaan diazОценок пока нет
- Informe Final Balancin y HeliceДокумент9 страницInforme Final Balancin y HelicePatricio FernándezОценок пока нет
- Proyecto BRAZO ROBOTICOДокумент9 страницProyecto BRAZO ROBOTICOandres felipe sandoval porrasОценок пока нет
- Freno Prony, Motor ACДокумент8 страницFreno Prony, Motor ACHaroldTFОценок пока нет
- Volante de InerciaДокумент6 страницVolante de InerciaJesus SerranoОценок пока нет
- Antecedentes Del Péndulo InvertidoДокумент7 страницAntecedentes Del Péndulo InvertidoErnesto_O_ate_6469Оценок пока нет
- Prác - 5Документ10 страницPrác - 5Yoselin ZuritaОценок пока нет
- Banda TransportadoraДокумент14 страницBanda Transportadorastrikerluis13Оценок пока нет
- Informe Segunda EntregaДокумент4 страницыInforme Segunda EntregaFabiana MonterreyОценок пока нет
- Diseño y Construcción de Un BALL and BEAMДокумент5 страницDiseño y Construcción de Un BALL and BEAMdaednicaОценок пока нет
- Sistema de Nivelación AutomáticoДокумент8 страницSistema de Nivelación AutomáticoHenry AjquejayОценок пока нет
- PI y PID de Un Brazo Tipo SCARA y Pendulo Invertido 17570015Документ24 страницыPI y PID de Un Brazo Tipo SCARA y Pendulo Invertido 17570015David Ferrusca MartinezОценок пока нет
- Simulación y control difuso del péndulo invertidoДокумент9 страницSimulación y control difuso del péndulo invertidooscarlalilagosОценок пока нет
- ENSAYO - Brazo RoboticoДокумент4 страницыENSAYO - Brazo RoboticoHernan SAОценок пока нет
- Control posición balancín motor-héliceДокумент15 страницControl posición balancín motor-hélicemanuel cruzОценок пока нет
- PFC+Modelo+y+Control+LQR+de+Una+Aeronave+de+Cuatro+RotoresДокумент166 страницPFC+Modelo+y+Control+LQR+de+Una+Aeronave+de+Cuatro+RotoresInkieto BtkОценок пока нет
- Articulo de Robot CuadrupedoДокумент5 страницArticulo de Robot CuadrupedoLupillo'sGRОценок пока нет
- Proyecto AscensorДокумент8 страницProyecto AscensorMatias Araya OlivaresОценок пока нет
- Informe de Electronica de PotenciaДокумент3 страницыInforme de Electronica de PotenciaANDRES BLANCO CUELLARОценок пока нет
- Articulo DR Carlos (Rev 1)Документ6 страницArticulo DR Carlos (Rev 1)Monty SilvaОценок пока нет
- Pendulo InvertidoДокумент12 страницPendulo InvertidoJazahel EspinosaОценок пока нет
- BalancinMotorHelice PDFДокумент15 страницBalancinMotorHelice PDFSebastianОценок пока нет
- Borrador 3 PenduloДокумент14 страницBorrador 3 PenduloManuel Blanco MendozaОценок пока нет
- Capítulo 4Документ19 страницCapítulo 4Andres ZambranoОценок пока нет
- Informe de ProyectoДокумент7 страницInforme de Proyectokevin4yalaОценок пока нет
- Lab 6 CTR 2Документ4 страницыLab 6 CTR 2Felipe MoreraОценок пока нет
- Práctica - Estudio Del Movimiento de Un Sistema Oscilante Por EnergíaДокумент8 страницPráctica - Estudio Del Movimiento de Un Sistema Oscilante Por Energíaeider doriaОценок пока нет
- Movimiento oscilatorio de un péndulo modelado por energíaДокумент8 страницMovimiento oscilatorio de un péndulo modelado por energíanatalia mancoОценок пока нет
- Entregable Corte 2. Modelado y SimulaciónДокумент14 страницEntregable Corte 2. Modelado y SimulaciónDaniel PerezОценок пока нет
- Turbina PeltonДокумент41 страницаTurbina PeltonWilson TrigosoОценок пока нет
- Ejercicios de Integrales de Línea, Superficie y VolumenОт EverandEjercicios de Integrales de Línea, Superficie y VolumenРейтинг: 4 из 5 звезд4/5 (2)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209От EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Рейтинг: 5 из 5 звезд5/5 (2)
- Topografia 04Документ53 страницыTopografia 04IngriMonzón50% (2)
- Cinemática tridimensional: parámetros cinemáticosДокумент46 страницCinemática tridimensional: parámetros cinemáticosMarcelo TaboadaОценок пока нет
- Cap09 FundamentosDeLaPruebaDeHipotesisPruebasDeUnaMuestra 046893-OCRДокумент40 страницCap09 FundamentosDeLaPruebaDeHipotesisPruebasDeUnaMuestra 046893-OCRGreciaEcheZapataОценок пока нет
- Ford Fulkerson en MathematicaДокумент8 страницFord Fulkerson en MathematicaCrimsonGlory123Оценок пока нет
- Métodos de prospectiva y elaboración de escenarios futurosДокумент4 страницыMétodos de prospectiva y elaboración de escenarios futurosalexОценок пока нет
- Resumen Capitulo 4 FELDERДокумент5 страницResumen Capitulo 4 FELDERSEBASTIAN RIVAS CALDERONОценок пока нет
- Anexo 03 Volumen de Excavacion Poste.Документ15 страницAnexo 03 Volumen de Excavacion Poste.Luis Cabrera PalaciosОценок пока нет
- ACFrOgA8bMnLWm8gXiL5JPqOAgefFvkj I08RHFHN kGDSc344hk995SvokcQx6 5Jm kOO5l5TZL1ormdi8P3cnZ4mpBrTRTilKNr0l7fGsX1KT0XXujzZrVia4WJ6SOKqmvToV4YjO7n-plyLXДокумент3 страницыACFrOgA8bMnLWm8gXiL5JPqOAgefFvkj I08RHFHN kGDSc344hk995SvokcQx6 5Jm kOO5l5TZL1ormdi8P3cnZ4mpBrTRTilKNr0l7fGsX1KT0XXujzZrVia4WJ6SOKqmvToV4YjO7n-plyLXdavid cenОценок пока нет
- Parámetros de Los SistemasДокумент3 страницыParámetros de Los SistemasFernando Bernal RodriguezОценок пока нет
- Qué Es La RestaДокумент2 страницыQué Es La Restaadreo7100% (2)
- Herramientas Rotar y Copia PolarДокумент3 страницыHerramientas Rotar y Copia PolarGusty RodriguezОценок пока нет
- Guía 2Документ2 страницыGuía 2Violeta ZasОценок пока нет
- Guía para expresiones racionales y radicales de menos deДокумент5 страницGuía para expresiones racionales y radicales de menos deLuis Felipe Pineda Beltran57% (7)
- 1201 PDFДокумент4 страницы1201 PDFFabián Andrés Posso GarcíaОценок пока нет
- Preparador de Clases MatematicasДокумент8 страницPreparador de Clases MatematicasJosdiaAlvarbelaezОценок пока нет
- Capitulo 7Документ36 страницCapitulo 7Cristhian Amado100% (1)
- Dosificacion Metodos Numericos 2018Документ2 страницыDosificacion Metodos Numericos 2018Anonymous Qj9JOFOОценок пока нет
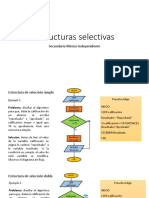
- Estructuras Selectivas - Ejemplos de Diagramas de FlujoДокумент3 страницыEstructuras Selectivas - Ejemplos de Diagramas de FlujoProfa. Ivonne RiveraОценок пока нет
- Cb101 Dibujo de Ingenieria IДокумент2 страницыCb101 Dibujo de Ingenieria IellabradordicoОценок пока нет
- Unidad 3Документ9 страницUnidad 3Gustavo C SaldañaОценок пока нет
- Planeacion B2 - 2Документ3 страницыPlaneacion B2 - 2Itzel FtОценок пока нет
- Mantención Supresores de PolvoДокумент5 страницMantención Supresores de PolvoAnonymous 1LgoS05gvlОценок пока нет
- Laboratorio Genética ProbabilidadДокумент2 страницыLaboratorio Genética ProbabilidadNoel Feliciano Febus0% (1)
- Tabla de Deflexiones y Pendientes en VigasДокумент8 страницTabla de Deflexiones y Pendientes en VigasCarlos LuОценок пока нет
- Margarita MOMENTUMДокумент20 страницMargarita MOMENTUMgustavoОценок пока нет
- 6to - tp3 Ecxuaciones LinealesДокумент5 страниц6to - tp3 Ecxuaciones Linealesmery29Оценок пока нет
- Definiciones de SimulaciónДокумент6 страницDefiniciones de SimulaciónAntonio100% (1)
- Trabajo de EstadisticaДокумент8 страницTrabajo de Estadisticajorge luis Galindo hernandezОценок пока нет
- Malla Curricular 2do SemestreДокумент9 страницMalla Curricular 2do SemestreMUNICIPIO BERMUDEZОценок пока нет
- Protocolo Individual Fundametos de MateДокумент3 страницыProtocolo Individual Fundametos de Matejuandamxpro ytОценок пока нет