Вам также может понравиться
- Features General Description: DE-ACCM3D Buffered 3g Tri-Axis AccelerometerДокумент5 страницFeatures General Description: DE-ACCM3D Buffered 3g Tri-Axis Accelerometersamsonit1Оценок пока нет
- Measuring Tilt With Low-G Accelerometers: Application NoteДокумент8 страницMeasuring Tilt With Low-G Accelerometers: Application NoteAriel R. CéspedОценок пока нет
- Anjali Shah. Instrumentationlab Report1Документ6 страницAnjali Shah. Instrumentationlab Report1Anurag SahОценок пока нет
- Acelerometro ADXL103-ADXL203Документ12 страницAcelerometro ADXL103-ADXL203cukey13Оценок пока нет
- LVDT SensorsДокумент6 страницLVDT SensorsGx Makizky SagunОценок пока нет
- ADXL311 SensorДокумент12 страницADXL311 Sensorhacguest8485Оценок пока нет
- ADCMT TR8652 ElectrometerДокумент4 страницыADCMT TR8652 Electrometerbudi0251Оценок пока нет
- Adxrs610 Yaw Rate GyroДокумент12 страницAdxrs610 Yaw Rate GyroTarek Car MillaОценок пока нет
- User 'S ManualДокумент88 страницUser 'S ManualEhitishamОценок пока нет
- AD22300, AD22301, AD22302: 3.3V Single and Dual Axis Automotive iMEMS AccelerometersДокумент5 страницAD22300, AD22301, AD22302: 3.3V Single and Dual Axis Automotive iMEMS AccelerometersHugo D. Alvarez100% (1)
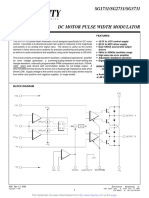
- SG1731/SG2731/SG3731: Features DescriptionДокумент5 страницSG1731/SG2731/SG3731: Features DescriptionRavindra MaraweeraОценок пока нет
- Manual Conversor WeidmullerДокумент15 страницManual Conversor WeidmullerAlmir PereiraОценок пока нет
- De Accm2g2Документ4 страницыDe Accm2g2foxHellОценок пока нет
- Jelf243b 9126 1699633 PDFДокумент10 страницJelf243b 9126 1699633 PDFmauricio alfonsoОценок пока нет
- TMP 35 GДокумент16 страницTMP 35 GWeslley FariaОценок пока нет
- Korba TentativeДокумент43 страницыKorba TentativeVenkatesh RaoОценок пока нет
- Integrated Circuit True RMS-to-DC Converter: C To +125 C Operation (AD536AS)Документ8 страницIntegrated Circuit True RMS-to-DC Converter: C To +125 C Operation (AD536AS)Decker JamesОценок пока нет
- ADXL202/ADXL210: Using The Analog Output Power Cycling When Using The Digital OutputДокумент1 страницаADXL202/ADXL210: Using The Analog Output Power Cycling When Using The Digital OutputmhasansharifiОценок пока нет
- Agilent Log Preamp CalibrationДокумент2 страницыAgilent Log Preamp Calibrationskeja2411Оценок пока нет
- ADXL326 AcelerometroДокумент16 страницADXL326 AcelerometroGerman GodiОценок пока нет
- Ea440 T Manual enДокумент4 страницыEa440 T Manual enArc HieОценок пока нет
- Seca 728 Service ManualДокумент19 страницSeca 728 Service Manualperla_canto_1100% (1)
- Digital Weighing TransmitterДокумент60 страницDigital Weighing TransmittergmweighingОценок пока нет
- 5855292-Avr Users Manual Ea63-5 CДокумент8 страниц5855292-Avr Users Manual Ea63-5 CAbhoe StankОценок пока нет
- MAG3 SMT Datasheet RevD1Документ4 страницыMAG3 SMT Datasheet RevD1lgrome73Оценок пока нет
- Hah1dr 900 SДокумент5 страницHah1dr 900 SktwellОценок пока нет
- Complex Engineering Activity: Power Generation LABДокумент15 страницComplex Engineering Activity: Power Generation LABabis 11Оценок пока нет
- LM334Документ26 страницLM3342567daОценок пока нет
- ATT2100 & 2200 ManualДокумент52 страницыATT2100 & 2200 ManualFranco SОценок пока нет
- SG1524Документ9 страницSG1524Med Habib AitОценок пока нет
- Baro Transmitter B-278-1T / - 2T: Instruction For UseДокумент8 страницBaro Transmitter B-278-1T / - 2T: Instruction For UseAhmad Hisyam ArifОценок пока нет
- Ad 536 AДокумент8 страницAd 536 AlamikkОценок пока нет
- A132XДокумент10 страницA132XAndres CamachoiОценок пока нет
- Calibration For HA43RJДокумент16 страницCalibration For HA43RJQussai BitarОценок пока нет
- Instrumentation AmplifierДокумент3 страницыInstrumentation AmplifierFreddy LlusionОценок пока нет
- UENR88650001Документ133 страницыUENR88650001sami akermi100% (1)
- SG 1524 - 2524 - 3524 - (LinFinity) PDFДокумент7 страницSG 1524 - 2524 - 3524 - (LinFinity) PDFJosé AdelinoОценок пока нет
- Low Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionДокумент13 страницLow Cost 1.2 G Dual Axis Accelerometer ADXL213: Features General DescriptionJose Adolfo Monteverde SalazarОценок пока нет
- Thermocouple Amplifier - Dual Ga 112Документ3 страницыThermocouple Amplifier - Dual Ga 112SUVENDU ADHIKARYОценок пока нет
- Strain Gauge Converter Module Z-SGДокумент8 страницStrain Gauge Converter Module Z-SGthiago weniskleyОценок пока нет
- Lab Session No. 7: ObjectiveДокумент4 страницыLab Session No. 7: ObjectiveNioОценок пока нет
- High Performance Video Op AmpДокумент16 страницHigh Performance Video Op Ampsrboghe651665Оценок пока нет
- Evaluation of Torque Measurement SystemДокумент6 страницEvaluation of Torque Measurement System123andybОценок пока нет
- Conductivity Supervision DescriptionДокумент3 страницыConductivity Supervision DescriptionMauricio Schmidt MunizОценок пока нет
- Nitronex An9Документ9 страницNitronex An9sanghomitraОценок пока нет
- GS2744BДокумент10 страницGS2744BToàn NgọcОценок пока нет
- Accelerometer:-: Musical InstrumentДокумент14 страницAccelerometer:-: Musical InstrumentJyotirekha PatiОценок пока нет
- Generator Automatic Voltage Regulator Operation ManualДокумент9 страницGenerator Automatic Voltage Regulator Operation Manualsabrahima100% (1)
- Vip 9615Документ37 страницVip 9615Phạm Văn HânОценок пока нет
- XK3101 (KM05) User ManualДокумент17 страницXK3101 (KM05) User ManualmanhОценок пока нет
- Protek 3033B User ID7248Документ10 страницProtek 3033B User ID7248Heiner Farid Castillo AvellaОценок пока нет
- User Manual: Hat530 Ats ControllerДокумент26 страницUser Manual: Hat530 Ats Controllerrjcp01Оценок пока нет
- 4-Channel/8-Channel Fault-Protected Analog Multiplexers ADG508F/ADG509F/ADG528FДокумент20 страниц4-Channel/8-Channel Fault-Protected Analog Multiplexers ADG508F/ADG509F/ADG528FSanket NaikОценок пока нет
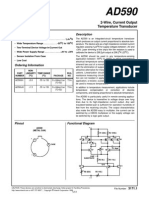
- AD590Документ11 страницAD590Timmy Neil SixxОценок пока нет
- User'S Manual: Larsen & Toubro LimitedДокумент8 страницUser'S Manual: Larsen & Toubro LimitedRa HulОценок пока нет
- ADXL210Документ11 страницADXL210JaehyupKimОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет