Вам также может понравиться
- PID ControlДокумент33 страницыPID ControlOmar FritsОценок пока нет
- DCS Control BlocksДокумент27 страницDCS Control Blocksramkumar kОценок пока нет
- CH 8Документ81 страницаCH 8kfaliОценок пока нет
- Vpat 10Документ10 страницVpat 10Xavier DannyОценок пока нет
- Interesting and Features of The Deltav Pid Controller: UsefulДокумент37 страницInteresting and Features of The Deltav Pid Controller: UsefulSoran Fathi100% (1)
- ADAM 6022 ManualДокумент24 страницыADAM 6022 ManualIndust TGОценок пока нет
- Unit 3 PLC PDFДокумент15 страницUnit 3 PLC PDFMahesh ShendeОценок пока нет
- Deltav Function 2 PDF Free (104 195)Документ92 страницыDeltav Function 2 PDF Free (104 195)Александр ГончарОценок пока нет
- MATCH DCS Operator Training V3Документ57 страницMATCH DCS Operator Training V3pagan4733100% (2)
- DeltaV Control PIDДокумент4 страницыDeltaV Control PIDhumbertoqeОценок пока нет
- PLC PresentationДокумент13 страницPLC PresentationNARENDER SINGHОценок пока нет
- F700 Version-Up PresentationДокумент26 страницF700 Version-Up PresentationjjbentesОценок пока нет
- Control Logix Modulos I - O Todos - 1756-Td002 - En-EДокумент186 страницControl Logix Modulos I - O Todos - 1756-Td002 - En-Egonzalo-Оценок пока нет
- Pic Servo SCДокумент51 страницаPic Servo SCFvck Ccp100% (1)
- 777D Monitoring SystemДокумент8 страниц777D Monitoring Systemzawmoe aungОценок пока нет
- D Agent - 1 - Work 77 S Upload 162096J1Документ22 страницыD Agent - 1 - Work 77 S Upload 162096J1Eren YILDIRIMОценок пока нет
- Catalog Sipart DR20Документ16 страницCatalog Sipart DR20roberto_freitas_18Оценок пока нет
- 1264 SNAP PID ModuleДокумент7 страниц1264 SNAP PID ModuleAlexander Charry GiraldoОценок пока нет
- Tip23 e PDFДокумент4 страницыTip23 e PDFThanh BaronОценок пока нет
- S6 Regulatory ControlДокумент22 страницыS6 Regulatory Controlplim5ollОценок пока нет
- Adam-4022t Manual v2.2Документ32 страницыAdam-4022t Manual v2.2Biplab DattaОценок пока нет
- Mitsubishi Melsec PLC Ladder Logic ApplicationДокумент215 страницMitsubishi Melsec PLC Ladder Logic ApplicationAmon AmarthОценок пока нет
- Microcontroller ArchitectureДокумент8 страницMicrocontroller ArchitectureMaxinne Chelzea MangaoangОценок пока нет
- Foxboro PIDA (Low)Документ75 страницFoxboro PIDA (Low)Cecep AtmegaОценок пока нет
- Auxiliary Display: Appendix DДокумент6 страницAuxiliary Display: Appendix DgivepleaseОценок пока нет
- IA Lab Manual.1pdf-1Документ64 страницыIA Lab Manual.1pdf-1Harsh GajjarОценок пока нет
- 04 - ProSafe-RS Hardware OverviewДокумент34 страницы04 - ProSafe-RS Hardware OverviewAbd El RahmanОценок пока нет
- Keya Monitor Software User Manual PDFДокумент14 страницKeya Monitor Software User Manual PDFAndreyPovoroznyukОценок пока нет
- SIMOCODE Pro Presentation For SIMODODE - DP CustomersДокумент24 страницыSIMOCODE Pro Presentation For SIMODODE - DP CustomersLeo SergioОценок пока нет
- Direct Digital ControlДокумент60 страницDirect Digital ControlAkaka32150% (2)
- PLC m4Документ17 страницPLC m4Goutham KОценок пока нет
- Esm 4450Документ119 страницEsm 4450kalla gouri shankarОценок пока нет
- Digital Inputs: 3 General Rules and RemarksДокумент2 страницыDigital Inputs: 3 General Rules and RemarksAmit BalotОценок пока нет
- 87 Catalog Invertere Ic5Документ19 страниц87 Catalog Invertere Ic5vga1234Оценок пока нет
- PLCДокумент87 страницPLCAnoop RaviОценок пока нет
- Sitrain s7-1200 PWM - PidДокумент46 страницSitrain s7-1200 PWM - Pidleningfe100% (3)
- Industrial AutomationДокумент16 страницIndustrial Automationvivek6681Оценок пока нет
- PLC ScadaДокумент43 страницыPLC ScadaabhijeetОценок пока нет
- Program Controller For RCA2/RCA: List of ModelsДокумент10 страницProgram Controller For RCA2/RCA: List of ModelsElectromateОценок пока нет
- PLC 2Документ31 страницаPLC 2Biniam HaddisОценок пока нет
- 3500 System Datasheet 162096 PDFДокумент22 страницы3500 System Datasheet 162096 PDFダナンジャイОценок пока нет
- C&IДокумент120 страницC&IDeepak JayОценок пока нет
- Experiment No 04 Ladder Diagram Development For Different Types of Logic GatesДокумент7 страницExperiment No 04 Ladder Diagram Development For Different Types of Logic GatesRavindraОценок пока нет
- PLC Training LiteratureДокумент45 страницPLC Training Literaturealex2gustavo2cuevas2Оценок пока нет
- PLC & ScadaДокумент43 страницыPLC & ScadaRama Kant Sahu90% (21)
- Apc 3 Module Notes - PLC and SCADA: Use of Relays in Process ControlДокумент9 страницApc 3 Module Notes - PLC and SCADA: Use of Relays in Process Control447 KusumanjaliОценок пока нет
- Digital Design: Design and Implementation of Car Parking System On VHDLДокумент11 страницDigital Design: Design and Implementation of Car Parking System On VHDLHoàng Sơn NguyễnОценок пока нет
- XGT PID (English But Sample Program)Документ12 страницXGT PID (English But Sample Program)IsmailОценок пока нет
- APPLICATION GUIDE - PID FunctionДокумент43 страницыAPPLICATION GUIDE - PID FunctioniedmondОценок пока нет
- SS2 Avp772 0100 02 PDFДокумент24 страницыSS2 Avp772 0100 02 PDFJose Gustavo Robles MoralesОценок пока нет
- ADAM 6022 ManualДокумент27 страницADAM 6022 ManualDede M. YusufОценок пока нет
- 507 DataДокумент2 страницы507 DatavasilimertzaniОценок пока нет
- Automatic Bottle Filling System Using PLC: By: Mithun M Sanjeev Nandhagopan K R R S Abhi KrishnaДокумент22 страницыAutomatic Bottle Filling System Using PLC: By: Mithun M Sanjeev Nandhagopan K R R S Abhi KrishnaAnonymous WR91Hp6Оценок пока нет
- Cacho, KathleenJoyC. (ESD FE)Документ5 страницCacho, KathleenJoyC. (ESD FE)KATHLEEN JOY CACHOОценок пока нет
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosОт EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosРейтинг: 5 из 5 звезд5/5 (1)
- Advanced Techniques and Technology of Computer-Aided Feedback ControlОт EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlОценок пока нет
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingОт EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingРейтинг: 4 из 5 звезд4/5 (1)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsОт EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsОценок пока нет
- Dev OpsДокумент273 страницыDev OpsUmith IndulaОценок пока нет
- WizGear BrochureДокумент5 страницWizGear BrochureabОценок пока нет
- Migrating From Requirements To DesignДокумент34 страницыMigrating From Requirements To DesignParth KunderОценок пока нет
- Risc-V Processor Verification: Processors For The Connected WorldДокумент20 страницRisc-V Processor Verification: Processors For The Connected WorldPrìñçé ÅsîfОценок пока нет
- Code Together-2Документ43 страницыCode Together-2Eedula GaneshreddyОценок пока нет
- Difference Between Object Lock and Class LockДокумент3 страницыDifference Between Object Lock and Class Lockshivprakashjob14Оценок пока нет
- Web Development Institute - Web Development CourseДокумент8 страницWeb Development Institute - Web Development CourseSHASHIKANT CHAUBEYОценок пока нет
- Agile Software DevelopmentДокумент33 страницыAgile Software DevelopmentSwati KurmdasОценок пока нет
- Placement Automation SystemДокумент57 страницPlacement Automation SystemAsif Koujaganur100% (1)
- Guidelines For Smart Grid Cyber SecurityДокумент597 страницGuidelines For Smart Grid Cyber SecurityGábor KárpátiОценок пока нет
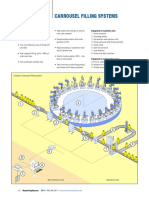
- Carrousel Filling Systems ENGДокумент2 страницыCarrousel Filling Systems ENGRadient MushfikОценок пока нет
- Skyway LIMS OverviewДокумент52 страницыSkyway LIMS OverviewSFC ABHA 1Оценок пока нет
- CN GayathriДокумент31 страницаCN Gayathrigayathri rajОценок пока нет
- Advanced JavascriptДокумент330 страницAdvanced Javascriptmarco100% (1)
- Elibrary Management SystemДокумент12 страницElibrary Management SystemDonz CortezОценок пока нет
- Asc Contact1Документ14 страницAsc Contact1galura gizeldaОценок пока нет
- NSE 3 FortiSOAR AttemptДокумент2 страницыNSE 3 FortiSOAR AttemptLorena TavaresОценок пока нет
- 12 Factor AppДокумент24 страницы12 Factor AppSamarthyam Santhosh Ramamoorthy100% (1)
- System Description: Engine Immobiliser - Engine Immobiliser SystemДокумент3 страницыSystem Description: Engine Immobiliser - Engine Immobiliser SystemdennoОценок пока нет
- COMP6Документ3 страницыCOMP6ahsanОценок пока нет
- B4 XpagesДокумент48 страницB4 XpagesEdgar GuarecucoОценок пока нет
- Claircore DocumentationДокумент83 страницыClaircore Documentationraspberries1Оценок пока нет
- Foundations of Software and System Performance Engineering PDFДокумент448 страницFoundations of Software and System Performance Engineering PDFAndrew AlexanderОценок пока нет
- Operator Overloading & Dunder Methods - Python Tutorials For Absolute Beginners in Hindi #67Документ3 страницыOperator Overloading & Dunder Methods - Python Tutorials For Absolute Beginners in Hindi #67Anonymous AZОценок пока нет
- Course LinkДокумент2 страницыCourse Linkvenkata sai gireesh pОценок пока нет
- Lecture 1 Introduction To Nonlinear Control SystemsДокумент44 страницыLecture 1 Introduction To Nonlinear Control SystemsThiên BùiОценок пока нет
- Engine P222LE SДокумент2 страницыEngine P222LE SFederico BabichОценок пока нет
- Introduction To C++Документ33 страницыIntroduction To C++NiveditaОценок пока нет
- API Terminology HandbookДокумент42 страницыAPI Terminology HandbookRaj100% (3)
- Model Question Paper AICEДокумент1 страницаModel Question Paper AICEraja sekarОценок пока нет