Вам также может понравиться
- NI Tutorial 2732 enДокумент5 страницNI Tutorial 2732 enmanumanu12Оценок пока нет
- At91sam7 - CanДокумент58 страницAt91sam7 - Cangopismiles1987Оценок пока нет
- CAN TutorialДокумент22 страницыCAN TutorialApoorva BhattОценок пока нет
- An Overview of Controller Area Network (CAN) Technology: November 12, 2003Документ20 страницAn Overview of Controller Area Network (CAN) Technology: November 12, 2003Dilyan MarinoffОценок пока нет
- Benz - Vehicle NetworkingДокумент27 страницBenz - Vehicle NetworkingAnanthОценок пока нет
- Intrusion Detection System Based On The Analysis of Time Intervals of CAN Messages For In-Vehicle NetworkДокумент6 страницIntrusion Detection System Based On The Analysis of Time Intervals of CAN Messages For In-Vehicle NetworkPaulОценок пока нет
- CAN Bus - Wikipedia, The Free EncyclopediaДокумент16 страницCAN Bus - Wikipedia, The Free EncyclopediaRakesh S K100% (1)
- CAN ProtocolДокумент9 страницCAN Protocolhaythem.mejri.proОценок пока нет
- Valeo Power ChargerДокумент2 страницыValeo Power ChargercristiОценок пока нет
- Applications: AutomotiveДокумент8 страницApplications: AutomotiveMohammad FaizalОценок пока нет
- Smart JIG Power DiagnosisДокумент102 страницыSmart JIG Power DiagnosisNicu LiviuОценок пока нет
- Converting Denary To HexДокумент28 страницConverting Denary To HexArif WidiyantoОценок пока нет
- Pow Powertrain Products PDF enДокумент67 страницPow Powertrain Products PDF enJesse DavisОценок пока нет
- Chrysler - CCD (Chrysler Collision Detection) Data Bus - Carprog - 博客园Документ21 страницаChrysler - CCD (Chrysler Collision Detection) Data Bus - Carprog - 博客园Francisco López RosasОценок пока нет
- Chapter3 Automotive Embedded ApplicationsДокумент156 страницChapter3 Automotive Embedded ApplicationsKomal KalkutkarОценок пока нет
- Hyundai Elantra 1.6 Engine Electrical1Документ55 страницHyundai Elantra 1.6 Engine Electrical1MANUALES2000CLОценок пока нет
- Avc LanДокумент9 страницAvc LanPedro BravoОценок пока нет
- LIN Basics For Beginners enДокумент118 страницLIN Basics For Beginners enAleksey Misiura100% (1)
- Diagnosis From The Drivers SeatДокумент101 страницаDiagnosis From The Drivers Seatabul hussain100% (1)
- MST 9000 PDFДокумент12 страницMST 9000 PDFJorge Alberto Barbosa Perez100% (1)
- Understanding and Using The CAN-1Документ41 страницаUnderstanding and Using The CAN-1mail87523Оценок пока нет
- UNIT 4 Fundamentals of Automotive ElectronicsДокумент61 страницаUNIT 4 Fundamentals of Automotive Electronicsnubla mОценок пока нет
- Avc Lan and Avc Lan PlusДокумент15 страницAvc Lan and Avc Lan PlusMario Alberto Abarca Rodriguez100% (1)
- Mosfet & Igbt: Ee3147 Power ElectronicsДокумент16 страницMosfet & Igbt: Ee3147 Power ElectronicsHoàng TúОценок пока нет
- Coduri Vag Com OctaviaДокумент13 страницCoduri Vag Com Octaviagtm55Оценок пока нет
- Esp32-S3 Technical Reference Manual enДокумент787 страницEsp32-S3 Technical Reference Manual enAОценок пока нет
- CAN FinalДокумент30 страницCAN Finaljyothi bagewadiОценок пока нет
- Electronic Control Unit (ECU) : Ankul GuptaДокумент20 страницElectronic Control Unit (ECU) : Ankul Guptadarkim ajahОценок пока нет
- Introduction To Canbus: Jason Mccomb FitasДокумент15 страницIntroduction To Canbus: Jason Mccomb FitasMike100% (1)
- VW/Audi 1.8T Transverse (FWD) Ignition Wiring Replacement Kit Installation Guide Skill Level 2 - ModerateДокумент21 страницаVW/Audi 1.8T Transverse (FWD) Ignition Wiring Replacement Kit Installation Guide Skill Level 2 - ModerateKushal ExpertОценок пока нет
- Automotive Electrical and AutotronicsДокумент8 страницAutomotive Electrical and Autotronicsrocky4bestОценок пока нет
- DSO Function Generator ExerciseДокумент24 страницыDSO Function Generator ExerciseEdidjo DarwinОценок пока нет
- PWM Based DC Motor Speed Control Using MicrocontrollerДокумент8 страницPWM Based DC Motor Speed Control Using MicrocontrollertazebОценок пока нет
- (Owner's Manual) 2007 Subaru Forester XДокумент356 страниц(Owner's Manual) 2007 Subaru Forester XbobОценок пока нет
- Auto Gear Shift Technology (AGS) or Auto Manual Transmission (AMT)Документ5 страницAuto Gear Shift Technology (AGS) or Auto Manual Transmission (AMT)Ahmed YousfiОценок пока нет
- 15 Diagnóstico de Componentes IntegralesДокумент18 страниц15 Diagnóstico de Componentes IntegralesmongongoОценок пока нет
- BootLoader Del 78K0-KX2Документ60 страницBootLoader Del 78K0-KX2Anonymous pu1L9ZОценок пока нет
- CAN HandoutДокумент16 страницCAN HandoutJaffer HussainОценок пока нет
- Brake - Control - 2 TKEДокумент26 страницBrake - Control - 2 TKETecwyn WebsterОценок пока нет
- 06 Grundlagen FlexRay v10 enДокумент39 страниц06 Grundlagen FlexRay v10 envinayОценок пока нет
- Steering Angle Sensor ResetsДокумент57 страницSteering Angle Sensor ResetsAunaunZaa'Оценок пока нет
- Relays and FusesДокумент8 страницRelays and FusesTesfahun TegegneОценок пока нет
- 5500-6600 LMS AdjustmentДокумент2 страницы5500-6600 LMS AdjustmentDon LuongОценок пока нет
- CAN-bus InterfaceДокумент2 страницыCAN-bus Interfacemohamed abd el razek0% (1)
- Controller Area Network: Submitted By:Chandra Shekar.I.G Dept of E&C 1NH02EC010 NhceДокумент22 страницыController Area Network: Submitted By:Chandra Shekar.I.G Dept of E&C 1NH02EC010 Nhceapi-3760105100% (2)
- Rfid Security Access Control System: Submitted byДокумент20 страницRfid Security Access Control System: Submitted byVale Conde CuatzoОценок пока нет
- Pull-Up and Pull-Down Resistors For Micro Controllers by ShanДокумент3 страницыPull-Up and Pull-Down Resistors For Micro Controllers by Shanshantilaal100% (1)
- Canalyzer: Installation & Quick Start GuideДокумент84 страницыCanalyzer: Installation & Quick Start GuideNitish Chiniwar100% (2)
- CAN Bus Sloa101bДокумент17 страницCAN Bus Sloa101bgatotОценок пока нет
- DP15&DP16 Error CodesДокумент1 страницаDP15&DP16 Error Codespavlik1Оценок пока нет
- Holley Carburetor Model 4160 Instruction Sheet 199R8339: DisassemblyДокумент6 страницHolley Carburetor Model 4160 Instruction Sheet 199R8339: DisassemblyAlfonso JaureguiОценок пока нет
- 1.USB-CAN Adapter ManualДокумент18 страниц1.USB-CAN Adapter ManualFrancisco Santiago GallardoОценок пока нет
- Automotive ElectronicsДокумент100 страницAutomotive ElectronicsanushkaОценок пока нет
- Sae j1962 1995 PDFДокумент8 страницSae j1962 1995 PDFmiguelcastilloОценок пока нет
- I S Bus Specification: 1.0 2.0 Basic Serial Bus RequirementsДокумент7 страницI S Bus Specification: 1.0 2.0 Basic Serial Bus RequirementseballiriОценок пока нет
- Fully Autonomous Vehicles: Visions of the future or still reality?От EverandFully Autonomous Vehicles: Visions of the future or still reality?Оценок пока нет
- Motion Control ReportОт EverandMotion Control ReportРейтинг: 4 из 5 звезд4/5 (1)
- Orbital Wrapping Machine Atis 90: Automatic Machine For Horizontal Packaging With StretchfilmДокумент5 страницOrbital Wrapping Machine Atis 90: Automatic Machine For Horizontal Packaging With StretchfilmEMRE KAAN USTAОценок пока нет
- 2013 Chevrolet Sonic - Engine CoolingДокумент85 страниц2013 Chevrolet Sonic - Engine Coolingbhanuka2009Оценок пока нет
- Determine CT Ratio of A MotorДокумент1 страницаDetermine CT Ratio of A MotorCu TeoОценок пока нет
- TDS Alpha 30 (EN) Rev6 PDFДокумент10 страницTDS Alpha 30 (EN) Rev6 PDFFelipe Andrés Camarada SilvaОценок пока нет
- GamBar Kerja LKS 2011 JatimДокумент7 страницGamBar Kerja LKS 2011 JatimDidikIswantoОценок пока нет
- Peco II 6875009BLK-62 Instruction ManualДокумент88 страницPeco II 6875009BLK-62 Instruction ManualChancey FosterОценок пока нет
- Alfa Romeo, 156, 2Документ3 страницыAlfa Romeo, 156, 2lartsim115100% (1)
- Analysis, Modelling and Simulation of A Multiphase Interleaved Buck DC/DC Converter For PV ApplicationsДокумент7 страницAnalysis, Modelling and Simulation of A Multiphase Interleaved Buck DC/DC Converter For PV ApplicationsInnovative Research PublicationsОценок пока нет
- When Power Quality Is Life and Death: Technology at WorkДокумент2 страницыWhen Power Quality Is Life and Death: Technology at WorkCosmin MihoreanuОценок пока нет
- Arnu07gm1a4.Encbleu Listeb de PiecesДокумент2 страницыArnu07gm1a4.Encbleu Listeb de PiecesDimitris ThanasopoulosОценок пока нет
- FIAT KOBELCO-e145w Electrical System PDFДокумент70 страницFIAT KOBELCO-e145w Electrical System PDFDragan67% (6)
- Aux Valve Brakes ST710Документ16 страницAux Valve Brakes ST710Jose VegaОценок пока нет
- Float Switch Price ChartДокумент3 страницыFloat Switch Price ChartratneshtОценок пока нет
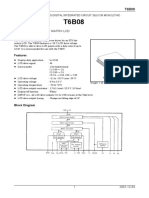
- Row Driver For A Dot Matrix LCD: FeaturesДокумент10 страницRow Driver For A Dot Matrix LCD: FeaturesPetr -Оценок пока нет
- SA-HT940PДокумент114 страницSA-HT940PAnonymous VEpCQPTUОценок пока нет
- Silicon NPN Triple Diffused Planar Transistor: (Complement To Type 2SA1693)Документ1 страницаSilicon NPN Triple Diffused Planar Transistor: (Complement To Type 2SA1693)llargo007Оценок пока нет
- 988h Lift and Tilt Sensor Cat - Cis.sis - PcontrollerДокумент2 страницы988h Lift and Tilt Sensor Cat - Cis.sis - Pcontrollerrao abdul bariОценок пока нет
- 00 Catalogue Update UK PDFДокумент7 страниц00 Catalogue Update UK PDFhepcomotionОценок пока нет
- Nema-23 Stepper MountДокумент1 страницаNema-23 Stepper MountModularCNCОценок пока нет
- Chapter 2Документ14 страницChapter 2Harsha VardhanОценок пока нет
- VRV X CatalogueДокумент54 страницыVRV X CatalogueTamОценок пока нет
- Service Manual: Dana ® Spicer ® Drive Axles September 2007Документ28 страницService Manual: Dana ® Spicer ® Drive Axles September 2007jasmin selimićОценок пока нет
- Mercury 200 OptiMax Jet Drive Service Manual (Since 2001) (PDF, ENG, 16.3 MB) PDFДокумент364 страницыMercury 200 OptiMax Jet Drive Service Manual (Since 2001) (PDF, ENG, 16.3 MB) PDFVit100% (1)
- NH 84285908R0 PreviewДокумент41 страницаNH 84285908R0 Previewmeza.josel1996Оценок пока нет
- User Manual: HM903DT A902MT-vДокумент21 страницаUser Manual: HM903DT A902MT-vTony HamiltonОценок пока нет
- Aib Ga11-30cДокумент40 страницAib Ga11-30ctheloniussherek100% (1)
- Cable Tray SpecificationДокумент1 страницаCable Tray SpecificationSudipto MajumderОценок пока нет
- 74FCT3807 Datasheet PDFДокумент9 страниц74FCT3807 Datasheet PDFedgarlibanioОценок пока нет
- NEC Express5800/R120f-1E System Configuration GuideДокумент34 страницыNEC Express5800/R120f-1E System Configuration GuideBrucelee LeebouapaoОценок пока нет
- Tier 4 Final Engine: Motor GraderДокумент16 страницTier 4 Final Engine: Motor Gradergoonzaalo_22Оценок пока нет