Вам также может понравиться
- Mechanical Vibrations and Condition MonitoringОт EverandMechanical Vibrations and Condition MonitoringРейтинг: 5 из 5 звезд5/5 (1)
- An Introduction To Time Waveform AnalysisДокумент21 страницаAn Introduction To Time Waveform AnalysisMohd Asiren Mohd Sharif100% (3)
- Section II - Basic Vibration TheoryДокумент85 страницSection II - Basic Vibration Theoryagiba100% (7)
- Timebase Plots ExplainedДокумент18 страницTimebase Plots ExplainedManuel L LombarderoОценок пока нет
- An Introduction To Time Waveform AnalysisДокумент17 страницAn Introduction To Time Waveform AnalysisBassemОценок пока нет
- Detection of Ski Slopes in Vibration SpectrumsДокумент7 страницDetection of Ski Slopes in Vibration SpectrumsjeyaselvanmОценок пока нет
- Detect Machinery Faults by Using Peak VueДокумент13 страницDetect Machinery Faults by Using Peak VueHarold Alconz100% (2)
- VibMatters Current IssueДокумент19 страницVibMatters Current IssueUsman JabbarОценок пока нет
- AMPLITUDE MODULATION Versus BEATSДокумент5 страницAMPLITUDE MODULATION Versus BEATSHaitham YoussefОценок пока нет
- SKF - Tech Associates of CharlotteДокумент57 страницSKF - Tech Associates of Charlotteiatorres100% (4)
- Introduction To PeakvueДокумент55 страницIntroduction To PeakvuesebastianОценок пока нет
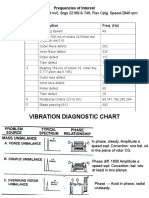
- Vibration Diagnostic Chart1Документ16 страницVibration Diagnostic Chart1Anand KumarОценок пока нет
- Autocorrelation: 131 CAT IV Part 1 - Signal Processing SlidebookДокумент8 страницAutocorrelation: 131 CAT IV Part 1 - Signal Processing SlidebookLe Thanh Hai100% (2)
- VIBS Modal Overview 021703 MACLДокумент55 страницVIBS Modal Overview 021703 MACLBakkiya RajОценок пока нет
- Advanced Vibration Analysis TechniquesДокумент324 страницыAdvanced Vibration Analysis Techniquesharikrishnanpd3327Оценок пока нет
- CHAPTER 6 Resonance and Critical Speed TestingДокумент31 страницаCHAPTER 6 Resonance and Critical Speed TestingHosam Abd Elkhalek67% (3)
- PeakvueДокумент68 страницPeakvueChe Khairuddin100% (1)
- Phase MeasurementДокумент5 страницPhase Measurementuak107080Оценок пока нет
- 11 PeakVue OverviewДокумент38 страниц11 PeakVue OverviewAhmad Syahroni100% (1)
- Using Time Waveform Analysis To Distinguish Looseness From MisalignmentДокумент5 страницUsing Time Waveform Analysis To Distinguish Looseness From MisalignmentManel Montesinos100% (1)
- Analisis de Vibraciones Mecanicas SKFДокумент31 страницаAnalisis de Vibraciones Mecanicas SKFJhonathan GarciaОценок пока нет
- A Review of Enveloping and Demodulation TechniquesДокумент6 страницA Review of Enveloping and Demodulation TechniquesMohamed WahidОценок пока нет
- ORBIT AnalysisДокумент4 страницыORBIT AnalysisManoj PaneriОценок пока нет
- Analyzing Gearbox Degradation Using Time-Frequency Signature AnalysisДокумент13 страницAnalyzing Gearbox Degradation Using Time-Frequency Signature AnalysisMohd Asiren Mohd Sharif100% (1)
- Vibration Analysis Manual Rev0Документ143 страницыVibration Analysis Manual Rev0iradanke100% (5)
- Time Waveform Analysis Choosing Proper SettingsДокумент3 страницыTime Waveform Analysis Choosing Proper SettingssebastianОценок пока нет
- Time Waveform Analysis CourseДокумент4 страницыTime Waveform Analysis CourseDean LofallОценок пока нет
- Vibration Adv 0402Документ433 страницыVibration Adv 0402Sajid Rafique100% (7)
- ISO 18436 Category IVДокумент2 страницыISO 18436 Category IVzona amrullohОценок пока нет
- Diagnostic Techniques For Vibration Analysis of BearingsДокумент9 страницDiagnostic Techniques For Vibration Analysis of BearingsMohd Asiren Mohd Sharif100% (1)
- Advanced Vibration Analysis On Gear Box TrainДокумент25 страницAdvanced Vibration Analysis On Gear Box TrainmitrachintuОценок пока нет
- Vibration NotesДокумент95 страницVibration NotesHaitham Youssef100% (1)
- PeakVue TrainingДокумент98 страницPeakVue TrainingThyagaraju Palisetty100% (5)
- Vibration Chart CharloteДокумент25 страницVibration Chart Charloteantok09100% (1)
- Gearbox Vibration Analysis Case StudiesДокумент8 страницGearbox Vibration Analysis Case StudiesAndré Luiz Nogueira100% (5)
- Electric Motor Diagnostics Defect Frequencies and Data ColleДокумент51 страницаElectric Motor Diagnostics Defect Frequencies and Data ColleSubrata Dubey50% (2)
- Envelope BearingДокумент14 страницEnvelope BearingHussein Razaq100% (1)
- Introduction To Time Wave Form AnalysisДокумент19 страницIntroduction To Time Wave Form Analysissaidha4568483Оценок пока нет
- Vibration Measurements On Slow Speed MachineryДокумент9 страницVibration Measurements On Slow Speed MachineryMohd Asiren Mohd SharifОценок пока нет
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisОт EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisРейтинг: 4 из 5 звезд4/5 (2)
- Forsthoffer’s Component Condition MonitoringОт EverandForsthoffer’s Component Condition MonitoringРейтинг: 4 из 5 звезд4/5 (2)
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentОт EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Why Industrial Bearings Fail: Analysis, Maintenance, and PreventionОт EverandWhy Industrial Bearings Fail: Analysis, Maintenance, and PreventionОценок пока нет
- Intelligent Fault Diagnosis and Remaining Useful Life Prediction of Rotating MachineryОт EverandIntelligent Fault Diagnosis and Remaining Useful Life Prediction of Rotating MachineryРейтинг: 5 из 5 звезд5/5 (2)
- Vibration AnalyzersДокумент16 страницVibration Analyzersyogacruise100% (1)
- Capgo - Vibration MonitoringДокумент3 страницыCapgo - Vibration MonitoringSufean SakinОценок пока нет
- Sonic Scanner GuideДокумент12 страницSonic Scanner Guidesdb158Оценок пока нет
- EECKT230 - Course Material 1Документ35 страницEECKT230 - Course Material 1reasjames0Оценок пока нет
- Oscillator Noise Analysis: Cyclostationary NoiseДокумент12 страницOscillator Noise Analysis: Cyclostationary Noisedeepakvaj25Оценок пока нет
- VibrationДокумент54 страницыVibrationmayureshrmahajan100% (3)
- United States Naval Academy: Division ofДокумент13 страницUnited States Naval Academy: Division ofdrdinglechengОценок пока нет
- Radar Signal Processing Graduate CourseДокумент70 страницRadar Signal Processing Graduate CourseWesley GeorgeОценок пока нет
- Introduction To Radar: - Information in This Presentation Can Be Found in A Number of Texts On RadarДокумент66 страницIntroduction To Radar: - Information in This Presentation Can Be Found in A Number of Texts On RadarParveen Verma100% (1)
- TC 503 Digital Communication Theory: Bandpass Modulation and DemodulationДокумент20 страницTC 503 Digital Communication Theory: Bandpass Modulation and Demodulationsyed02Оценок пока нет
- BTS3911B Product Description (V100R010C10 - 01) (PDF) - enДокумент34 страницыBTS3911B Product Description (V100R010C10 - 01) (PDF) - enmirs100% (1)
- ZTE UMTS Congestion Control Feature Guide - V1 10Документ47 страницZTE UMTS Congestion Control Feature Guide - V1 10GiftОценок пока нет
- Stud Finder Final v1Документ6 страницStud Finder Final v1api-323825539Оценок пока нет
- Introduction To Modulation: Baseband and Passband SignalsДокумент7 страницIntroduction To Modulation: Baseband and Passband Signalspraveen alwisОценок пока нет
- SK08A Addressable Loop-Powered Siren Installation Sheet (Multilingual) R2.0Документ12 страницSK08A Addressable Loop-Powered Siren Installation Sheet (Multilingual) R2.0123vb123Оценок пока нет
- Daily Top 10 Worst Cell Report - 2G & 3GДокумент8 страницDaily Top 10 Worst Cell Report - 2G & 3GBona RadiantoОценок пока нет
- Seminar Report On Wireless Local Area NetworkДокумент38 страницSeminar Report On Wireless Local Area Networknjpatel9100% (12)
- Saini 2015Документ6 страницSaini 2015SaduMunisekharОценок пока нет
- 2945A ManualДокумент249 страниц2945A Manualmakara5966Оценок пока нет
- 399 Open Amipv2Документ2 страницы399 Open Amipv2CanhCuaCàMuốiОценок пока нет
- Manual de Usuario SMCWEBT-GДокумент2 страницыManual de Usuario SMCWEBT-GxXHercules01XxОценок пока нет
- Computer Networks-2024Документ1 страницаComputer Networks-2024dreamdalesocietyОценок пока нет
- Airspan Mobile Wimax RF Planning Parameters PDFДокумент23 страницыAirspan Mobile Wimax RF Planning Parameters PDFrapsterxОценок пока нет
- Digital Subscriber Line (DSL)Документ6 страницDigital Subscriber Line (DSL)Archangel Gab100% (1)
- Jitter Wander SynchronisationДокумент58 страницJitter Wander Synchronisationaajayagarwal80Оценок пока нет
- Antenna RFI MonitoringДокумент71 страницаAntenna RFI MonitoringmoannaОценок пока нет
- FTTX GPONДокумент25 страницFTTX GPONAlirezaОценок пока нет
- ADC0808/ADC0809: General DescriptionДокумент7 страницADC0808/ADC0809: General DescriptionSebastin AshokОценок пока нет
- Nokia Wi-Fi Access Point AC400i 4x4 Standalone Indoor - Data Sheet v3.9Документ3 страницыNokia Wi-Fi Access Point AC400i 4x4 Standalone Indoor - Data Sheet v3.9zeb066100% (1)
- QSC Amp Spa2-60 PDFДокумент2 страницыQSC Amp Spa2-60 PDFAnthony Marin De FreitasОценок пока нет
- Crystal oscillation circuit diagrams for quartz crystal unitsДокумент3 страницыCrystal oscillation circuit diagrams for quartz crystal unitsRAVINDERОценок пока нет
- Adu4518r5 PDFДокумент2 страницыAdu4518r5 PDFНиколайИгоревичНасыбуллинОценок пока нет
- Local Area Networks GuideДокумент27 страницLocal Area Networks GuidePriyanka BhavsarОценок пока нет
- Signals and SystemsДокумент42 страницыSignals and Systemsjijo123408Оценок пока нет
- Ericsson Product Training: Rahul KansalДокумент83 страницыEricsson Product Training: Rahul KansalThinley Wangmo100% (1)
- 5GNOW D3.2 v1.3Документ100 страниц5GNOW D3.2 v1.3Edson SilvaОценок пока нет
- SCX2 W100BCДокумент2 страницыSCX2 W100BCpandavision76Оценок пока нет
- IARU Region 1 HF Band Plan: Effective 01 June 2016Документ4 страницыIARU Region 1 HF Band Plan: Effective 01 June 2016Andreas KakkavasОценок пока нет
- ZYTLДокумент9 страницZYTLqlxiaoОценок пока нет
- 1.LZU 1088614 R1A Microwave Transmission Technology - OverviewДокумент14 страниц1.LZU 1088614 R1A Microwave Transmission Technology - OverviewAmine MohamedОценок пока нет