Вам также может понравиться
- CT Ejercicio 29Документ14 страницCT Ejercicio 29maria guadalupe100% (1)
- Stenger, Victor - Ha Encontrado La Ciencia A DiosДокумент39 страницStenger, Victor - Ha Encontrado La Ciencia A DiosIván Antezana QuirozОценок пока нет
- Cálculo Actuarial: Fundamentos del SeguroДокумент28 страницCálculo Actuarial: Fundamentos del SeguroSofía GuajardoОценок пока нет
- Trabajo de EstadisticaДокумент29 страницTrabajo de Estadisticagabriela murcia100% (1)
- Guía Laboratorio No.1 - OMI106 - 02 - 2022Документ16 страницGuía Laboratorio No.1 - OMI106 - 02 - 2022Gerardo Mauricio Rodríguez FloresОценок пока нет
- Semana 13Документ36 страницSemana 13Rossy CastañedaОценок пока нет
- Actividad Entregable 1Документ12 страницActividad Entregable 1Leslie MesiasОценок пока нет
- Proyecto de Unidad Didáctica 3 Equipo 6Документ23 страницыProyecto de Unidad Didáctica 3 Equipo 6Julia JaimeОценок пока нет
- Maximización de Utilidades. Caso de Estudio PL IO 2018 2019Документ15 страницMaximización de Utilidades. Caso de Estudio PL IO 2018 2019diego ojedaОценок пока нет
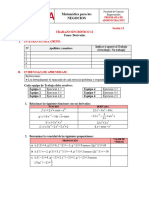
- Examen1P Int Art Abr Ago 2022 PrácticoДокумент4 страницыExamen1P Int Art Abr Ago 2022 Prácticoivan santianaОценок пока нет
- Calculo IFДокумент6 страницCalculo IFGonzalo RodriguezОценок пока нет
- Metodo Del TrapecioДокумент4 страницыMetodo Del TrapecioKleiner Ulloa AguilarОценок пока нет
- S3.s12 2 Resolver Ejercicios-Problemas-CasosДокумент2 страницыS3.s12 2 Resolver Ejercicios-Problemas-CasosJUAN CARLOS ALAYO CARDOZOОценок пока нет
- Investigación Aplicación e Importancia de La Integral.Документ11 страницInvestigación Aplicación e Importancia de La Integral.Elida SudarioОценок пока нет
- AcademiaДокумент25 страницAcademiaRaul100% (1)
- Ecuaciones Diferenciales Actividad 1Документ9 страницEcuaciones Diferenciales Actividad 1fernandaОценок пока нет
- Foro 10Документ6 страницForo 10Cristian Andres Portillo MoraОценок пока нет
- Num PyДокумент122 страницыNum PymparrapОценок пока нет
- Guia MCDДокумент2 страницыGuia MCDCarlos Hernan Montoya badillaОценок пока нет
- Tarea 1 - IOPДокумент11 страницTarea 1 - IOPMaría Fernanda CastilloОценок пока нет
- Tarea0 - Edwin ArevaloДокумент9 страницTarea0 - Edwin ArevalofelipeОценок пока нет
- Luz Angelica Rodriguez-1875Документ10 страницLuz Angelica Rodriguez-1875Lúz RodríguezОценок пока нет
- 2p - Anexo7 - MaximoComunDivisorДокумент1 страница2p - Anexo7 - MaximoComunDivisorchristian guerreroОценок пока нет
- Reporte de PrácticaДокумент4 страницыReporte de PrácticaJesus DiazОценок пока нет
- Promagracion Entera BinariaДокумент5 страницPromagracion Entera BinariaAlex CoveñaОценок пока нет
- Soluciontrabajo Sep19Документ22 страницыSoluciontrabajo Sep19Maximiliano xDОценок пока нет
- Algoritmo promedio notas arregloДокумент5 страницAlgoritmo promedio notas arregloAlexandra RamosОценок пока нет
- Taller de IntegralesДокумент3 страницыTaller de IntegralesNathaliaОценок пока нет
- Mate Bachillerato Profe en Linea 2019Документ164 страницыMate Bachillerato Profe en Linea 2019glecabОценок пока нет
- Anual Uni Semana 25 - RMДокумент19 страницAnual Uni Semana 25 - RMJose Noe Manzano BurgosОценок пока нет
- Sesion 7Документ25 страницSesion 7Alexis ReyesОценок пока нет
- IOP1 - Métodos de Solución Gráfica en PLДокумент14 страницIOP1 - Métodos de Solución Gráfica en PLMarlon OrtegaОценок пока нет
- Me TodosДокумент9 страницMe TodosRodrigo SaavedraОценок пока нет
- Práctico 1 - Gutierrez LeonardoДокумент13 страницPráctico 1 - Gutierrez LeonardoLeonardo Gutierrez.Оценок пока нет
- MR-TPS2-206 2021-2Документ5 страницMR-TPS2-206 2021-2Janeth Carolina Cortez NoriegaОценок пока нет
- 323 MR TSP 2021-2Документ2 страницы323 MR TSP 2021-2Janeth Carolina Cortez NoriegaОценок пока нет
- GAMLSSДокумент63 страницыGAMLSSDamián HdezОценок пока нет
- Diseño Mecánico - ExamenДокумент1 страницаDiseño Mecánico - ExamenEithon Padilla PáezОценок пока нет
- Fcayf Iio 5 Programacion Entera 2020Документ15 страницFcayf Iio 5 Programacion Entera 2020Perla JuarezОценок пока нет
- Guia Independiente N.4 Medidas de Tendencia Central Media Aritmeticamedianamoda Datos AgrДокумент11 страницGuia Independiente N.4 Medidas de Tendencia Central Media Aritmeticamedianamoda Datos AgrJosue CastillaОценок пока нет
- Tutorial de Prácticas MathcadДокумент12 страницTutorial de Prácticas MathcadJulio MelendezОценок пока нет
- Examenes Finales MAT102 v1.0Документ18 страницExamenes Finales MAT102 v1.0Mateo Han VegasОценок пока нет
- MarinJuan UsugaJuan TolozaGuillermoДокумент12 страницMarinJuan UsugaJuan TolozaGuillermoJuan Diego Marin RodriguezОценок пока нет
- Actividad I - Investigación Documental I.O. IIДокумент11 страницActividad I - Investigación Documental I.O. IIManuel De Jesus Alfonzo PerezОценок пока нет
- Examen Final 1Документ3 страницыExamen Final 1Eduardo Montalvo del MonteОценок пока нет
- Reductor de VelocidadesДокумент36 страницReductor de VelocidadesAbner AcunaОценок пока нет
- MiFee - CL - Pauta AyuДокумент4 страницыMiFee - CL - Pauta AyupaquebotttОценок пока нет
- Media GeometricaДокумент9 страницMedia GeometricaAntonio VelizОценок пока нет
- Econometría Financiera: Clase 1. Modelos Lineales de Series FinancierasДокумент82 страницыEconometría Financiera: Clase 1. Modelos Lineales de Series FinancierasRichard GacitúaОценок пока нет
- An Alisis Num Erico (ICM840-01)Документ22 страницыAn Alisis Num Erico (ICM840-01)GraficaОценок пока нет
- ADA1. Técnicas de IntegraciónДокумент3 страницыADA1. Técnicas de Integraciónalfredo azcorraОценок пока нет
- Ergonomía para El Área de CocinaДокумент34 страницыErgonomía para El Área de CocinaBenitez KarenОценок пока нет
- 1002 - Tarea - 2 - Diego CardonaДокумент13 страниц1002 - Tarea - 2 - Diego CardonaDiego Alejandro Cardona GiraldoОценок пока нет
- Equipo N°01 - Ejercicios Sesión 07Документ31 страницаEquipo N°01 - Ejercicios Sesión 07Nikol Solsol JaraОценок пока нет
- Fila AAA Oral I7-I8Документ4 страницыFila AAA Oral I7-I8Denilson Chuquipoma SantosОценок пока нет
- Trabajo 2 Julian Pantoja - 2Документ14 страницTrabajo 2 Julian Pantoja - 2Julian PantojaОценок пока нет
- Algoritmo 7. Distancia Entre Dos PuntosДокумент4 страницыAlgoritmo 7. Distancia Entre Dos PuntosAmérica VelazcoОценок пока нет
- Tarea 2-Experimentos Aleatorios y Distribuciones de ProbabilidadДокумент15 страницTarea 2-Experimentos Aleatorios y Distribuciones de ProbabilidadAnguie Cantor67% (3)
- Segunda Evaluacion IoДокумент8 страницSegunda Evaluacion IoLuis DanielОценок пока нет
- 735 TPS2 2020-1Документ4 страницы735 TPS2 2020-1Vipul ShahОценок пока нет
- Actividad 1 2 LapsoДокумент3 страницыActividad 1 2 LapsoLord Mayor Campbell NewmanОценок пока нет
- Unidad 1 - Sebastian Marmolejo AndradeДокумент12 страницUnidad 1 - Sebastian Marmolejo Andradesebastian marmolejoОценок пока нет
- Geometria Analitica y DescriptivaДокумент12 страницGeometria Analitica y DescriptivaAndres Ricardo0% (1)
- Tarea 3Документ2 страницыTarea 3gcabanes2000100% (1)
- Sesiones Matematica Prof. Nelly-05-23Документ10 страницSesiones Matematica Prof. Nelly-05-23Jhan Carlos, HUERTO MACHADOОценок пока нет
- Signos de agrupación en matemáticasДокумент2 страницыSignos de agrupación en matemáticasdianaОценок пока нет
- Vonmatic - 5º de SecДокумент3 страницыVonmatic - 5º de SecAntony Hinojosa FloresОценок пока нет
- Mathcad - Sesion 1 2015-02-28Документ6 страницMathcad - Sesion 1 2015-02-28Anonymous WEOUKYZ8Оценок пока нет
- TALLER DE RECUPERACIÓN DE MATEMÁTICASДокумент4 страницыTALLER DE RECUPERACIÓN DE MATEMÁTICASSantiago AndradeОценок пока нет
- 3 Taller Corte 2 ENVIARДокумент1 страница3 Taller Corte 2 ENVIARNicolas Santiago Camacho AnguloОценок пока нет
- Fisica 1 Cecytebc Educación TecnológicaДокумент230 страницFisica 1 Cecytebc Educación TecnológicaCarlos Serrano Rosales40% (5)
- 007 Didactica 2Документ8 страниц007 Didactica 2Flor GonzálezОценок пока нет
- CF-302 Semana 2Документ4 страницыCF-302 Semana 2Luis fiat luxОценок пока нет
- AL-06A-12 (P - Cocientes Notables) C1-C2Документ2 страницыAL-06A-12 (P - Cocientes Notables) C1-C2Iep Kepler TrujilloОценок пока нет
- XcvfdsgacДокумент7 страницXcvfdsgacCaro RuizОценок пока нет
- Cantidad de Movimiento Angular. by Maria Isabel HoyosTorres On PreziДокумент2 страницыCantidad de Movimiento Angular. by Maria Isabel HoyosTorres On PreziDiana AdОценок пока нет
- Números DecimalesДокумент19 страницNúmeros DecimalesJorge Edmundo Erazo Gandarillas100% (1)
- 11 Propiedades de Los DETERMINANTESДокумент14 страниц11 Propiedades de Los DETERMINANTEShernanОценок пока нет
- PROBABILIDADES DE LAS MATEMATICAS (Waleska)Документ7 страницPROBABILIDADES DE LAS MATEMATICAS (Waleska)Skalin MorenoОценок пока нет
- SESION - 12 - Matematica - 24-JUNIO - 2020 - Hilda.Документ10 страницSESION - 12 - Matematica - 24-JUNIO - 2020 - Hilda.NatalieОценок пока нет
- Actividades de Matemática (Del 03 Al 07 de Mayo)Документ32 страницыActividades de Matemática (Del 03 Al 07 de Mayo)Edgar ZAVALETA PORTILLOОценок пока нет
- Guía N°1 10° Tercer Periodo Identidades TrigonometricasДокумент5 страницGuía N°1 10° Tercer Periodo Identidades Trigonometricasraultorresospino83% (6)
- Trigo No Me TriaДокумент10 страницTrigo No Me TriaBeatriz Blazquez SanchezОценок пока нет
- MarzoДокумент24 страницыMarzoBrenda ParejaОценок пока нет
- Kara Book 4Документ25 страницKara Book 4link86Оценок пока нет
- PROGRAMACION LINEAL - Formulacion - Método GráficoДокумент75 страницPROGRAMACION LINEAL - Formulacion - Método GráficoPablo Mayorga RomeroОценок пока нет
- Diego MoralesДокумент4 страницыDiego MoralesDiego FabianОценок пока нет
- GUÍA N°6-Historia Del Algebra Los Signos (SOLUCIÓN)Документ2 страницыGUÍA N°6-Historia Del Algebra Los Signos (SOLUCIÓN)adolfo alejandro arenas ramosОценок пока нет
- Grados, radianes y círculos: preguntas y respuestas sobre ángulos y geometría circularДокумент2 страницыGrados, radianes y círculos: preguntas y respuestas sobre ángulos y geometría circularFer VelasqОценок пока нет