Вам также может понравиться
- A Permanent Magnet DC Motor ProblemДокумент32 страницыA Permanent Magnet DC Motor ProblemVladimir Kuznetsov100% (1)
- A Three-Phase Induction Motor ProblemДокумент26 страницA Three-Phase Induction Motor ProblemmehmetОценок пока нет
- Design of Synchronous MachinesДокумент17 страницDesign of Synchronous MachinesNiteshNarukaОценок пока нет
- Switched Reluctance Reluctance Motors and ControlДокумент47 страницSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- Novel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoДокумент6 страницNovel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoNenad Kostadinovic50% (2)
- Switched Reluctance Motor (SRM)Документ8 страницSwitched Reluctance Motor (SRM)Ömer Faruk AbdullahОценок пока нет
- Induction MotorsДокумент25 страницInduction Motorsapi-3827132100% (2)
- PX7203-Special Electrical Machines PDFДокумент11 страницPX7203-Special Electrical Machines PDFvaishnavisriОценок пока нет
- EE2403 Special Electrical MachinesДокумент19 страницEE2403 Special Electrical MachinesvasanthavananОценок пока нет
- شرح مخطط كارنوفДокумент65 страницشرح مخطط كارنوفzoherofОценок пока нет
- Ac Series MotorДокумент15 страницAc Series MotorMani Balaji TОценок пока нет
- Construction of Three Phase Induction MotorДокумент18 страницConstruction of Three Phase Induction MotorRajeev ValunjkarОценок пока нет
- The Basics of Stepping MotorsДокумент6 страницThe Basics of Stepping MotorsSherif EltoukhiОценок пока нет
- Dcmotors and Their RepresentationДокумент61 страницаDcmotors and Their RepresentationSoeprapto AtmariОценок пока нет
- Modelling and Simuation of BLDC Motor in MATLAB GUIДокумент5 страницModelling and Simuation of BLDC Motor in MATLAB GUIvishiwizardОценок пока нет
- Stepper MotorДокумент18 страницStepper MotorGanesh Pingle100% (1)
- Induction Motor: Navigation SearchДокумент8 страницInduction Motor: Navigation SearchSoni Mishra TiwariОценок пока нет
- Circuit Simulation of A BLDC MotorДокумент4 страницыCircuit Simulation of A BLDC MotorjpmacabascoОценок пока нет
- Induction MotorДокумент39 страницInduction MotorSaneer M SaliОценок пока нет
- Universal Motors: Presented by Meraj WarsiДокумент13 страницUniversal Motors: Presented by Meraj WarsiMeraj WarsiОценок пока нет
- Solid State Drives Short BookДокумент48 страницSolid State Drives Short BookGomathi Raja MОценок пока нет
- DC MachinesДокумент52 страницыDC MachinesArun Kumar100% (1)
- Brushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Документ17 страницBrushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Manuj GargОценок пока нет
- BLDCДокумент4 страницыBLDCmechtex Pvt LtdОценок пока нет
- Speed Control of A Switched Reluctance Motor PDFДокумент67 страницSpeed Control of A Switched Reluctance Motor PDFrijilpoothadi50% (2)
- Basic SVPWMДокумент6 страницBasic SVPWMVAMSIKRISHNAEEEОценок пока нет
- 3phase Induction Motor (Sukhpreet)Документ17 страниц3phase Induction Motor (Sukhpreet)Ankesh KunwarОценок пока нет
- DC MachinesДокумент49 страницDC MachinesAshfaq AbibОценок пока нет
- Week 71Документ25 страницWeek 71Raphael SebucОценок пока нет
- Universal Motor - WikipediaДокумент27 страницUniversal Motor - WikipediaAlejandro ReyesОценок пока нет
- Unit 3 SRMДокумент66 страницUnit 3 SRMDr SriОценок пока нет
- Stepper IntroДокумент60 страницStepper IntroAshok More100% (1)
- Hysteresis MotorДокумент14 страницHysteresis Motorcamming soon100% (1)
- Induction Motors Unit 3Документ26 страницInduction Motors Unit 3babu KaroliОценок пока нет
- Unit 3Документ5 страницUnit 3Narasimman DonОценок пока нет
- ECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersДокумент60 страницECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersKelvin LiewОценок пока нет
- Three Phase Induction MotorДокумент21 страницаThree Phase Induction MotorPrianshu JyosyulaОценок пока нет
- Generalized Theory of Electrical MachinesДокумент2 страницыGeneralized Theory of Electrical MachinesAmitabha67% (6)
- 2012 Practical Strategies For Improved Cooling of Electrical Motors and Generators Dave Staton INDUCTICA TECHNICAL CONFERENCE PDFДокумент8 страниц2012 Practical Strategies For Improved Cooling of Electrical Motors and Generators Dave Staton INDUCTICA TECHNICAL CONFERENCE PDFuuur35Оценок пока нет
- Permanent Magnet Brushless DC MotorДокумент18 страницPermanent Magnet Brushless DC MotorBala SubramanianОценок пока нет
- AC DC DrivesДокумент13 страницAC DC Drives322399mk7086Оценок пока нет
- Hysteresis MotorДокумент27 страницHysteresis MotorSubham GhoshОценок пока нет
- UNIT 5 - Special MachinesДокумент33 страницыUNIT 5 - Special MachinesKapilachander ThangavelОценок пока нет
- Hystersis Motor PDFДокумент15 страницHystersis Motor PDFJohn BogyОценок пока нет
- 3 Phase Induction Motor Speed Control Using PIC PDFДокумент18 страниц3 Phase Induction Motor Speed Control Using PIC PDFAmmar Al-Kindy100% (2)
- DC Motor Speed ControllerДокумент22 страницыDC Motor Speed ControllerShafqt MbrkОценок пока нет
- Lab MachineДокумент9 страницLab MachineAnonymous ryvoPIDОценок пока нет
- CH - 3. Power System StablityДокумент72 страницыCH - 3. Power System StablityTsega Solomon KidaneОценок пока нет
- BLDC MotorДокумент16 страницBLDC MotorArchana Diwakar RanjishОценок пока нет
- PMBLDC Motor DriveДокумент55 страницPMBLDC Motor DriveSushant SinghОценок пока нет
- Differential Transformation Method for Mechanical Engineering ProblemsОт EverandDifferential Transformation Method for Mechanical Engineering ProblemsОценок пока нет
- Brush LesДокумент36 страницBrush LesLatisha CarterОценок пока нет
- A Three-Phase Induction Motor ProblemДокумент26 страницA Three-Phase Induction Motor Problemowen674s100% (2)
- Ee8002 - Dem - Question Bank - Unit4Документ4 страницыEe8002 - Dem - Question Bank - Unit4DEVIОценок пока нет
- MeasurementOf SinglePhaseMotor2017Документ6 страницMeasurementOf SinglePhaseMotor2017KHULNA KINGS gamingОценок пока нет
- Ee8002 - Dem - Question Bank - Unit5Документ4 страницыEe8002 - Dem - Question Bank - Unit5DEVIОценок пока нет
- Development of High Speed Alternator For Small Gas Turbine EngineДокумент8 страницDevelopment of High Speed Alternator For Small Gas Turbine EngineMahesh NakawalaОценок пока нет
- BDC Torque Vs Advance AngleДокумент12 страницBDC Torque Vs Advance AngleAhmet Yasin BaltacıОценок пока нет
- Converter Temperature Regulation With Dual Mode Control of Fault-Tolerant Permanent Magnet Motors - N Fernando, L Papini, C GeradaДокумент7 страницConverter Temperature Regulation With Dual Mode Control of Fault-Tolerant Permanent Magnet Motors - N Fernando, L Papini, C GeradaNuwantha FernandoОценок пока нет
- Electromagnetic Energy Conversion Efficiency Enhancement of Switched Reluctance Motors With Zero-Voltage Loop Current Commutation - N FErnando, M BarnesДокумент11 страницElectromagnetic Energy Conversion Efficiency Enhancement of Switched Reluctance Motors With Zero-Voltage Loop Current Commutation - N FErnando, M BarnesNuwantha FernandoОценок пока нет
- 5SYA 2093-00 - Thermal Design of IGBT ModulesДокумент9 страниц5SYA 2093-00 - Thermal Design of IGBT ModulesNuwantha FernandoОценок пока нет
- 1996 - 2458Документ1 страница1996 - 2458Nuwantha FernandoОценок пока нет
- American University of Sharjah Department of Electrical EngineeringДокумент5 страницAmerican University of Sharjah Department of Electrical EngineeringNajmul Puda PappadamОценок пока нет
- Week 2-Process and Instrumentation DiagramДокумент31 страницаWeek 2-Process and Instrumentation DiagramMohd Yashfi Yunus100% (1)
- Lightolier Night Magic Landscape Lighting Brochure 1988Документ34 страницыLightolier Night Magic Landscape Lighting Brochure 1988Alan MastersОценок пока нет
- Ujt Circuits - Power ElectronicsДокумент7 страницUjt Circuits - Power ElectronicsMoh OkoeОценок пока нет
- OFV-5000 Vibrometer Controller: Measuring VibrationsДокумент4 страницыOFV-5000 Vibrometer Controller: Measuring VibrationsvnetawzОценок пока нет
- Analysis and Implementation of Fuzzy Logic Controller Based MPPT To Enhance Power Quality in PV SystemДокумент10 страницAnalysis and Implementation of Fuzzy Logic Controller Based MPPT To Enhance Power Quality in PV SystemEditor IJTSRDОценок пока нет
- PPM 2017 1.0 HV (Weekly)Документ2 страницыPPM 2017 1.0 HV (Weekly)Nazlie NasirОценок пока нет
- 3103 EM35MR Gas Valve - Product ManualДокумент50 страниц3103 EM35MR Gas Valve - Product ManualJoão Pedro MoreiraОценок пока нет
- 873P Ultrasonic Sensors With Dual Discrete/Single Analog OutputsДокумент4 страницы873P Ultrasonic Sensors With Dual Discrete/Single Analog Outputsmanduca matthewОценок пока нет
- Profibus-Dp: Installation ManualДокумент38 страницProfibus-Dp: Installation ManualLeandroОценок пока нет
- Engineering ManualДокумент265 страницEngineering ManualdavayhayОценок пока нет
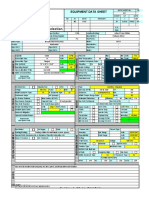
- Example Pump Selection: Equipment Data SheetДокумент4 страницыExample Pump Selection: Equipment Data SheetMohamed Yassine LahianiОценок пока нет
- Xeno Catalog XL 205F E14Документ1 страницаXeno Catalog XL 205F E14mantilla7Оценок пока нет
- Digital Electronics Lab-I: Laboratory Manual (EEC-352)Документ41 страницаDigital Electronics Lab-I: Laboratory Manual (EEC-352)sneh22augОценок пока нет
- Chapter 4 Laplace TransformДокумент54 страницыChapter 4 Laplace Transformkhaled jОценок пока нет
- Bus Timing:: ̅̅̅̅̅) To ̅ 0 For The 8088 and / ̅̅̅ 1 For The 8086. If Data Are ReadДокумент6 страницBus Timing:: ̅̅̅̅̅) To ̅ 0 For The 8088 and / ̅̅̅ 1 For The 8086. If Data Are ReadHassan Al BaityОценок пока нет
- MEMOREX mt1194Документ30 страницMEMOREX mt1194Saul ArriagaОценок пока нет
- Comparison of Various PWM Techniques For Field Oriented Control Vsi Fed PMSM DriveДокумент9 страницComparison of Various PWM Techniques For Field Oriented Control Vsi Fed PMSM DrivechaitanyaОценок пока нет
- 37PFL5332 LC7 (1) .1LДокумент114 страниц37PFL5332 LC7 (1) .1LWall BrysonОценок пока нет
- Introduction v2xДокумент12 страницIntroduction v2xVishwas GeraОценок пока нет
- OIM GB 1190056002 Cnt0Документ360 страницOIM GB 1190056002 Cnt0Sandi Junior SihotangОценок пока нет
- Sidewinder - Current Sensor: Low Frequency Equivalent CircuitДокумент3 страницыSidewinder - Current Sensor: Low Frequency Equivalent CircuitGonzalo RiveraОценок пока нет
- Raspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)Документ27 страницRaspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)orangota100% (1)
- Onkyo TX Sr508Документ64 страницыOnkyo TX Sr508Augustin MarkovicОценок пока нет
- Lab.8. DFT and FFT TransformsДокумент16 страницLab.8. DFT and FFT TransformsTsega TeklewoldОценок пока нет
- Calculation and Measurement of Potential and Electric Field Distribution Along 1000 KV AC Transmission Line Composite InsulatorДокумент6 страницCalculation and Measurement of Potential and Electric Field Distribution Along 1000 KV AC Transmission Line Composite InsulatoralpcruzОценок пока нет
- A1324 5 6 DatasheetДокумент12 страницA1324 5 6 DatasheetKrisztian BoneraОценок пока нет
- Catalogue Micro-Moteurs Namiki - TSAДокумент68 страницCatalogue Micro-Moteurs Namiki - TSAWilliam RoaОценок пока нет
- Lithium-Ion Stationary Battery Capacity Sizing Formula For The Establishment of Industrial DesignДокумент7 страницLithium-Ion Stationary Battery Capacity Sizing Formula For The Establishment of Industrial Design장중구100% (1)
- Electrical Load List: Mohammed N.M. Al-Baddah & PartnerДокумент12 страницElectrical Load List: Mohammed N.M. Al-Baddah & PartnerJesОценок пока нет