Вам также может понравиться
- UntitledДокумент10 страницUntitledapi-222480083Оценок пока нет
- Opamp CodeДокумент22 страницыOpamp Codeapi-531846547Оценок пока нет
- HC-SR04 Ultrasonic Sensor to NodeMCU Arduino CloudДокумент10 страницHC-SR04 Ultrasonic Sensor to NodeMCU Arduino CloudSonia MohapatraОценок пока нет
- PID-kirjaston tuonti ja saatimen määritysДокумент8 страницPID-kirjaston tuonti ja saatimen määritysSam Fisher LambertОценок пока нет
- Typedef Unsigned Char Typedef Unsigned Int Typedef Unsigned LongДокумент8 страницTypedef Unsigned Char Typedef Unsigned Int Typedef Unsigned LongAmir Si KetengОценок пока нет
- ScriptДокумент5 страницScriptSilviuDragomirОценок пока нет
- Byte Pattern DetectorДокумент11 страницByte Pattern DetectorBangon Kali100% (1)
- 1Документ4 страницы1Rakesh RakiОценок пока нет
- H 1Документ7 страницH 1nilton_9365611Оценок пока нет
- Main Program MonitoringДокумент10 страницMain Program MonitoringBagus NugrohoОценок пока нет
- #Include #Include #Include : Int Int Int Int IntДокумент9 страниц#Include #Include #Include : Int Int Int Int IntĐông NguyễnОценок пока нет
- SHT1x and SHT7x Sample Code: Humidity & Temperature SensorДокумент7 страницSHT1x and SHT7x Sample Code: Humidity & Temperature Sensorer_gaurav_iceОценок пока нет
- ESP8266 Masina3PWM - InoДокумент10 страницESP8266 Masina3PWM - InomarinpopaОценок пока нет
- PIR Motion Sensor AlarmДокумент46 страницPIR Motion Sensor AlarmSyad AlyОценок пока нет
- Gyroscope LED Controller STM32F407 DiscoveryДокумент21 страницаGyroscope LED Controller STM32F407 DiscoveryAndrei GeorgeОценок пока нет
- Asynchronous FIFOДокумент3 страницыAsynchronous FIFORoshan KumarОценок пока нет
- PID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderДокумент13 страницPID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderStewin Perez100% (1)
- BlynkexamplesДокумент16 страницBlynkexamplesUYeMin HtikeОценок пока нет
- SpihsmДокумент26 страницSpihsmapi-438120791Оценок пока нет
- MotorencodersДокумент9 страницMotorencodersapi-398062839100% (1)
- Spi Protocol Verilog Code ExplanationДокумент15 страницSpi Protocol Verilog Code Explanationgokul pОценок пока нет
- I2c Sniffer2Документ5 страницI2c Sniffer2Anonymous n30qTRQPoI100% (1)
- CHTGPTДокумент23 страницыCHTGPTMahmoud ElmohamdyОценок пока нет
- IK_BALANCINGДокумент7 страницIK_BALANCINGTanner DuncanОценок пока нет
- CCS C compiler Access to PIC internal peripherals summaryДокумент14 страницCCS C compiler Access to PIC internal peripherals summaryEdmond LamОценок пока нет
- Code MauДокумент22 страницыCode MauKhánh Trịnh MinhОценок пока нет
- Cloud Hoppers Weather Station Using Arduino Uno Board and Ethernet ShieldДокумент7 страницCloud Hoppers Weather Station Using Arduino Uno Board and Ethernet ShieldPaul GomezОценок пока нет
- Arduino Real-Time Prayer Times ClockДокумент6 страницArduino Real-Time Prayer Times Clockkoddok postmanОценок пока нет
- ATmega8 SHT71 Temperature Humidity and Dew Point ExampleДокумент9 страницATmega8 SHT71 Temperature Humidity and Dew Point Examplehieuhuech1Оценок пока нет
- Wifi Module Interfacing With AVRДокумент33 страницыWifi Module Interfacing With AVRMH 108812Оценок пока нет
- Main Code Lab 7Документ4 страницыMain Code Lab 7William HuangОценок пока нет
- Evse ChargerДокумент17 страницEvse ChargerdkvnsyvkgbОценок пока нет
- ReloadircapturemoduleДокумент3 страницыReloadircapturemoduleapi-398062839Оценок пока нет
- IoT Based Humidity and Temperature Monitoring Using Arduino UnoДокумент9 страницIoT Based Humidity and Temperature Monitoring Using Arduino UnoAnonymous xufRCGXОценок пока нет
- Obd2 Simulator - InoДокумент4 страницыObd2 Simulator - InoabdОценок пока нет
- #Include #Include #Include #Include #IncludeДокумент4 страницы#Include #Include #Include #Include #Includeshiva1luОценок пока нет
- Initgpio: Void VoidДокумент12 страницInitgpio: Void Voidapi-397509789Оценок пока нет
- Stepper Acceleration FreertosДокумент9 страницStepper Acceleration FreertosSourabh KumawatОценок пока нет
- Display "Hello World"message Using Internal UARTДокумент16 страницDisplay "Hello World"message Using Internal UARTAkshathaОценок пока нет
- ADCДокумент2 страницыADCfrancissimo185Оценок пока нет
- Nuevo Documento de TextoДокумент3 страницыNuevo Documento de Textodibij70167Оценок пока нет
- Max6675 Pic16f877aДокумент3 страницыMax6675 Pic16f877aVICTOR HUGO HERNANDEZ CISNEROSОценок пока нет
- Test Code2555Документ6 страницTest Code2555JaОценок пока нет
- "DHT.H" : Include Include Include Include DefineДокумент2 страницы"DHT.H" : Include Include Include Include DefinearevazhagunvcОценок пока нет
- Pic 18f452 Implementation of Digital FiltersДокумент5 страницPic 18f452 Implementation of Digital FiltersishakubalamiОценок пока нет
- Example Testing Sketch For Various DHT HumidityДокумент4 страницыExample Testing Sketch For Various DHT Humidityايتا سيتيانينجسيهОценок пока нет
- Sim HTTPДокумент4 страницыSim HTTPThinh HoangОценок пока нет
- Home Automation Using Arduino Wifi Module Esp8266Документ11 страницHome Automation Using Arduino Wifi Module Esp8266Dr. M. Thillai Rani Asst Prof ECEОценок пока нет
- proiectNou4releePopicaOtaFinal InoДокумент33 страницыproiectNou4releePopicaOtaFinal InomarinpopaОценок пока нет
- Appendices For SoftwareДокумент14 страницAppendices For Softwareyma warriorОценок пока нет
- CodecuДокумент6 страницCodecuLinhChi HPОценок пока нет
- LAB Manual: Disributed System Name:-Akshay Kumar Sem.: - 7Документ10 страницLAB Manual: Disributed System Name:-Akshay Kumar Sem.: - 7loki gurjarОценок пока нет
- Sample Code Humidity Sensor SHTXXДокумент7 страницSample Code Humidity Sensor SHTXXnooriusefОценок пока нет
- CodemauДокумент8 страницCodemauTiến Bùi ĐìnhОценок пока нет
- Dsp programs for signal generation and ADC acquisitionДокумент14 страницDsp programs for signal generation and ADC acquisitionJaipaul CheernamОценок пока нет
- Programacion NodemcuДокумент12 страницProgramacion NodemcuJoséPérezCamposОценок пока нет
- STM32 RC Car (Android Control Via Bluetooth)Документ9 страницSTM32 RC Car (Android Control Via Bluetooth)winОценок пока нет
- Projects With Microcontrollers And PICCОт EverandProjects With Microcontrollers And PICCРейтинг: 5 из 5 звезд5/5 (1)
- Solar Charger Made Simple Attiny85Документ1 страницаSolar Charger Made Simple Attiny85myEbooksОценок пока нет
- Zivan Charger Stand Alone HackДокумент3 страницыZivan Charger Stand Alone HackmyEbooks100% (2)
- Bms Diy Arduino 08bДокумент1 страницаBms Diy Arduino 08bmyEbooksОценок пока нет
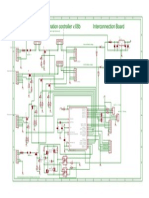
- Offgrid Automation Controller 08bДокумент1 страницаOffgrid Automation Controller 08bmyEbooksОценок пока нет
- L298 Shieldv2.1 PDFДокумент1 страницаL298 Shieldv2.1 PDFmyEbooksОценок пока нет
- Bms Diy Arduino 08bДокумент1 страницаBms Diy Arduino 08bmyEbooksОценок пока нет
- L298 PCB ShieldV2.1Документ1 страницаL298 PCB ShieldV2.1myEbooksОценок пока нет
- L296 Schematis v1rcДокумент1 страницаL296 Schematis v1rcmyEbooksОценок пока нет
- L296 Primary SideДокумент1 страницаL296 Primary SidemyEbooksОценок пока нет
- Buck Converter Lm317 PCBДокумент1 страницаBuck Converter Lm317 PCBmyEbooksОценок пока нет
- L296 Primary Side v1rcДокумент1 страницаL296 Primary Side v1rcmyEbooksОценок пока нет
- L296 SchematicДокумент1 страницаL296 SchematicmyEbooks100% (1)
- L296 Secondary SideДокумент1 страницаL296 Secondary SidemyEbooksОценок пока нет
- Schematic Buck Converter Lm317Документ1 страницаSchematic Buck Converter Lm317myEbooksОценок пока нет
- TFT LCD Mega v1.0Документ6 страницTFT LCD Mega v1.0myEbooksОценок пока нет
- Nabduino Picaxe Arduino ShieldДокумент2 страницыNabduino Picaxe Arduino ShieldmyEbooksОценок пока нет
- DropDownbox Manuel Befolkning DotnetДокумент5 страницDropDownbox Manuel Befolkning DotnetmyEbooksОценок пока нет
- Pioneer Cdj-1000 MkI Ejects All Compact DiscДокумент7 страницPioneer Cdj-1000 MkI Ejects All Compact DiscmyEbooksОценок пока нет
- Zivan NG3 Charger Logic SchematicДокумент6 страницZivan NG3 Charger Logic SchematicmyEbooks57% (7)
- Arduino As VoltmeterДокумент1 страницаArduino As VoltmetermyEbooksОценок пока нет
- Dallas Ds18b20Документ4 страницыDallas Ds18b20myEbooksОценок пока нет
- Transported by The Holy SpiritДокумент38 страницTransported by The Holy Spiritdiasjona100% (4)
- Lesson 4 RS1 Events in Salvation HistoryДокумент9 страницLesson 4 RS1 Events in Salvation HistoryAker jeri RadiОценок пока нет
- AccessData A30-327 Exam PrepДокумент19 страницAccessData A30-327 Exam PrepSandeep Yadav (CA)Оценок пока нет
- NCSC Project Report 2022Документ25 страницNCSC Project Report 2022Anushka DasОценок пока нет
- Learn the Periodic Table easily with fun Hindi mnemonicsДокумент4 страницыLearn the Periodic Table easily with fun Hindi mnemonicsAVINASH KUMARОценок пока нет
- Mohanty Consciousness and KnowledgeДокумент9 страницMohanty Consciousness and KnowledgeRobert HaneveldОценок пока нет
- SB Review Units 3-4Документ3 страницыSB Review Units 3-4yaroslav panferovОценок пока нет
- Report On Student Industrial Work Experience Scheme (Siwes) at National Library of Nigeria Kwara State BranchДокумент49 страницReport On Student Industrial Work Experience Scheme (Siwes) at National Library of Nigeria Kwara State BranchBukola JamesОценок пока нет
- Bodviken Countertop Wash Basin - AA 1284003 6 - Pub PDFДокумент12 страницBodviken Countertop Wash Basin - AA 1284003 6 - Pub PDFCristina MladenoviciОценок пока нет
- Fe RazonableДокумент606 страницFe RazonableGuillermo Enrique Vidalon Sirlupu92% (12)
- Hist. Determinantes PDFДокумент442 страницыHist. Determinantes PDFiamendesОценок пока нет
- Letter Naming Fluency InterventionsДокумент26 страницLetter Naming Fluency Interventionskelton_chee5234Оценок пока нет
- COT 4 RPMS Inter Observer Agreement Form For T I III For SY 2022 2023Документ1 страницаCOT 4 RPMS Inter Observer Agreement Form For T I III For SY 2022 2023Lyra Maloloy-on100% (3)
- MCQ in English Part 6 Licensure Exam For Teachers 2022Документ19 страницMCQ in English Part 6 Licensure Exam For Teachers 2022Sabalza, Ruffelyn AnnОценок пока нет
- Testing and DebuggingДокумент36 страницTesting and DebuggingMuhammad YasirОценок пока нет
- Verbos en InglésДокумент18 страницVerbos en InglésJoel Gonzalez CruzОценок пока нет
- Cheng and Fox (2017) - Beliefs About AssessmentДокумент13 страницCheng and Fox (2017) - Beliefs About AssessmentSamuel SantosОценок пока нет
- Inf1520 Tut102 2022Документ107 страницInf1520 Tut102 2022Melashini PothrajuОценок пока нет
- 14th ROMAN 4.2Документ7 страниц14th ROMAN 4.2Dhruv BajajОценок пока нет
- K. S. Patwardhan, S. A. Nampally, S. L. Singh-Lilavati of Bhaskaracarya - Treatise of Mathematics of Vedic Tradition (2001) PDFДокумент116 страницK. S. Patwardhan, S. A. Nampally, S. L. Singh-Lilavati of Bhaskaracarya - Treatise of Mathematics of Vedic Tradition (2001) PDFMr. Ashok ChaudharyОценок пока нет
- Webquest Project French 4 TopicsДокумент4 страницыWebquest Project French 4 Topicsapi-262262315Оценок пока нет
- Brian Milliron - Letter of RecommendationДокумент1 страницаBrian Milliron - Letter of Recommendationapi-131046807Оценок пока нет
- A-79955e 01 050818Документ17 страницA-79955e 01 050818hobo52013Оценок пока нет
- Parts of Speech - AdjectivesДокумент8 страницParts of Speech - AdjectivesDian MardianahОценок пока нет
- Mohammad Saleemuddin KsaДокумент4 страницыMohammad Saleemuddin KsaMohammed WasiuddinОценок пока нет
- 1Документ50 страниц1sreekantthОценок пока нет
- Ngayon at Kailan Man: Recorded by Basil ValdezДокумент8 страницNgayon at Kailan Man: Recorded by Basil ValdezDhexter Villa100% (3)
- MTB 3 Pointers 1st Final ExamДокумент6 страницMTB 3 Pointers 1st Final ExamAlessandra NuñezОценок пока нет
- Chapter SEVEN - ACTIVITIES.Speaking PDFДокумент19 страницChapter SEVEN - ACTIVITIES.Speaking PDFEsther Ponmalar Charles100% (1)
- Netbackup Interview QuestionsДокумент5 страницNetbackup Interview Questionslmolluru85% (13)