Вам также может понравиться
- DSP ReportДокумент5 страницDSP ReportKurnia WanОценок пока нет
- Infinite Impulse ResponseДокумент126 страницInfinite Impulse ResponseLe BinhОценок пока нет
- FirДокумент4 страницыFirAhmed HussainОценок пока нет
- Design of Digital FIR High Pass Filter Using Particle Swarm Optimization (PSO) TechniqueДокумент8 страницDesign of Digital FIR High Pass Filter Using Particle Swarm Optimization (PSO) TechniqueijsretОценок пока нет
- Lab 6 - Matlab FDAToolsДокумент4 страницыLab 6 - Matlab FDAToolsQuýHoàngОценок пока нет
- Nexys4 PDM RefProj2 V2Документ12 страницNexys4 PDM RefProj2 V2Vale Conde Cuatzo100% (2)
- Design Technique of Bandpass FIR Filter Using Various Window FunctionДокумент6 страницDesign Technique of Bandpass FIR Filter Using Various Window FunctionSai ManojОценок пока нет
- Fir Filters ReportДокумент8 страницFir Filters ReportGaneshVenkatachalamОценок пока нет
- Fir FilterДокумент10 страницFir FilterAravind RameshОценок пока нет
- Lab No 9Документ6 страницLab No 9meenahilОценок пока нет
- COMSATS Institute of Information TechnologyДокумент4 страницыCOMSATS Institute of Information Technologymarryam nawazОценок пока нет
- Bartlett Window Using MatlabДокумент5 страницBartlett Window Using MatlabAnushree ShahdeoОценок пока нет
- FIR Filter Kaiser WindowДокумент16 страницFIR Filter Kaiser WindowAshira JayaweeraОценок пока нет
- Fir Kaiser Window Notes-3 PDFДокумент19 страницFir Kaiser Window Notes-3 PDFprajwalОценок пока нет
- FIR FilterДокумент32 страницыFIR FilterWan TingОценок пока нет
- Lowpass Fir Filter Using Hamming WindowДокумент6 страницLowpass Fir Filter Using Hamming WindowDeepthi PrabhakaranОценок пока нет
- FIR & IIR Filters DesignДокумент12 страницFIR & IIR Filters DesignPreeti KatiyarОценок пока нет
- Matlab 8Документ12 страницMatlab 8M Azeem100% (1)
- 02 Embedded Design Life CycleДокумент19 страниц02 Embedded Design Life CyclePAUL SATHIYANОценок пока нет
- Pengolahan Sinyal - Bab 1Документ20 страницPengolahan Sinyal - Bab 1YehudhaWillySОценок пока нет
- Band Pass PresentationДокумент16 страницBand Pass PresentationTalal Al-SindiОценок пока нет
- 5,6 Ldic New Course FileДокумент49 страниц5,6 Ldic New Course FileTarun PrasadОценок пока нет
- Lab 3 PDFДокумент11 страницLab 3 PDFkishen kunalanОценок пока нет
- Morales L.G. (Ed.) Adaptive Filtering ApplicationsДокумент410 страницMorales L.G. (Ed.) Adaptive Filtering ApplicationsArash TorkamanОценок пока нет
- Iir Filter - Analog To Digital Filter Transformations - 06april2022Документ28 страницIir Filter - Analog To Digital Filter Transformations - 06april2022Shahwar AliaОценок пока нет
- Echo Cancellation Project ProposalДокумент2 страницыEcho Cancellation Project ProposalmidhunОценок пока нет
- DSP Iir BZTДокумент9 страницDSP Iir BZTMaaz MyzxОценок пока нет
- Updated RFD Lab Manual PDFДокумент46 страницUpdated RFD Lab Manual PDFAminaMouhoucheОценок пока нет
- Filter DesignДокумент9 страницFilter DesignTaylor MaddixОценок пока нет
- Dsp-Unit 6.2 Window Based Fir FiltersДокумент92 страницыDsp-Unit 6.2 Window Based Fir FiltersMaheswaraОценок пока нет
- Report On "Sampling Theorem Verification & Frequency Domain Analysis Using MATLAB."Документ8 страницReport On "Sampling Theorem Verification & Frequency Domain Analysis Using MATLAB."Tes 2000Оценок пока нет
- Applications of Active Filters 1Документ1 страницаApplications of Active Filters 1Yawar ArslanОценок пока нет
- DSP-5-Unit-Multirate SP NotesДокумент15 страницDSP-5-Unit-Multirate SP NotesR MuruganОценок пока нет
- FDA Tool IN MatlabДокумент4 страницыFDA Tool IN Matlabhasan1100Оценок пока нет
- IIR Filter DesignДокумент51 страницаIIR Filter Designnehashroff36Оценок пока нет
- Real-Time DSP: ECE 5655/4655 Lecture NotesДокумент34 страницыReal-Time DSP: ECE 5655/4655 Lecture NotesOussama MstraiiОценок пока нет
- Iir FilterДокумент10 страницIir FilterSurajSinghОценок пока нет
- Fir Filter DesignДокумент94 страницыFir Filter Designarjun cat0% (1)
- UG - EC303 DSP Part-6 On-Chip Peripherals-Print PDFДокумент20 страницUG - EC303 DSP Part-6 On-Chip Peripherals-Print PDFapuurvaОценок пока нет
- Design of FIR FiltersДокумент28 страницDesign of FIR Filtersdivya1587Оценок пока нет
- IIR Filter Design With MATLABДокумент13 страницIIR Filter Design With MATLABseemabОценок пока нет
- Lab 5. FIR Filter Design in MatlabДокумент14 страницLab 5. FIR Filter Design in MatlabShreyash SillОценок пока нет
- DSP Processor FundamentalsДокумент58 страницDSP Processor FundamentalsSayee KrishnaОценок пока нет
- Wavelets and Multiresolution: by Dr. Mahua BhattacharyaДокумент39 страницWavelets and Multiresolution: by Dr. Mahua BhattacharyashubhamОценок пока нет
- CELPДокумент23 страницыCELPANeek181Оценок пока нет
- High Order Programmable and Tunable Analog Filter ICДокумент16 страницHigh Order Programmable and Tunable Analog Filter ICRahil JainОценок пока нет
- DSP Lab Sample Viva QuestionsДокумент10 страницDSP Lab Sample Viva QuestionsManish NarkhedeОценок пока нет
- Psmaitrey DSP - VI UNIT PDFДокумент24 страницыPsmaitrey DSP - VI UNIT PDFSatya KrishnaОценок пока нет
- Fir Filter DesignДокумент4 страницыFir Filter DesignRamanathan SunderОценок пока нет
- Sigma Delta Modulator NutshellДокумент5 страницSigma Delta Modulator NutshellZubair MohammedОценок пока нет
- Lab # 07 IIR PDFДокумент13 страницLab # 07 IIR PDFIrfan HaiderОценок пока нет
- Fast Fourier TransformДокумент32 страницыFast Fourier Transformanant_nimkar9243100% (1)
- High-Pass, Band-Pass and Band-Reject FiltersДокумент3 страницыHigh-Pass, Band-Pass and Band-Reject FiltersÁSädKHänОценок пока нет
- Digital Signal ProcessingДокумент163 страницыDigital Signal ProcessingMaster RajuОценок пока нет
- A Report On Band Bass Filter (BPF) 2 - 221104 - 192612Документ13 страницA Report On Band Bass Filter (BPF) 2 - 221104 - 192612md7mdОценок пока нет
- OptiSystem Introductory TutorialsДокумент162 страницыOptiSystem Introductory TutorialsJoão FonsecaОценок пока нет
- Chapter 2 - FIR Filters - Digital Filter DesignДокумент100 страницChapter 2 - FIR Filters - Digital Filter DesignSanjay BalwaniОценок пока нет
- Chapter 2 - FIR Filters - Digital Filter Design - Mikroelektronika PDFДокумент114 страницChapter 2 - FIR Filters - Digital Filter Design - Mikroelektronika PDFAnimesh NagrareОценок пока нет
- Low-Pass Digital Filtering From RapidSTM32Документ23 страницыLow-Pass Digital Filtering From RapidSTM32jackabrahamОценок пока нет
- Performance Analysis of FIR Filter Algorithm and Architecture To Design A Programmable Pre-Modulation Filter For Avionic ApplicationДокумент5 страницPerformance Analysis of FIR Filter Algorithm and Architecture To Design A Programmable Pre-Modulation Filter For Avionic ApplicationSayeed HabeebОценок пока нет
- 1-TOPPOWER SMD Parts Designs and Advantages IntroductionДокумент2 страницы1-TOPPOWER SMD Parts Designs and Advantages IntroductiontoppowerОценок пока нет
- P7 (Analysis 4-Korea & Taiwan) (Auto-Saved)Документ68 страницP7 (Analysis 4-Korea & Taiwan) (Auto-Saved)changmin shimОценок пока нет
- Determination of Stiffness of Roller Bearings An Alternative ApproachДокумент7 страницDetermination of Stiffness of Roller Bearings An Alternative Approachsasina5449Оценок пока нет
- Transformer Inrush Currents and Protection 2603 003 A00Документ4 страницыTransformer Inrush Currents and Protection 2603 003 A00Joshi DhvanitОценок пока нет
- Silicon Micro Venturi Nozzles For Cost-EfficientДокумент10 страницSilicon Micro Venturi Nozzles For Cost-EfficientAnnappa N AОценок пока нет
- Proview PZ456 LCD Service ManualДокумент25 страницProview PZ456 LCD Service ManualZoran KovacevicОценок пока нет
- Optical SourcesДокумент89 страницOptical Sourcessambasivarao racakonda100% (2)
- Ad 557Документ6 страницAd 557TWChan69Оценок пока нет
- Chap23 PDFДокумент26 страницChap23 PDFsafdar lashariОценок пока нет
- Isro SC Ec Previous Solved Papers Made EasyДокумент236 страницIsro SC Ec Previous Solved Papers Made EasyShivanshu Pandey0% (1)
- Phywe University ExperimentsДокумент356 страницPhywe University ExperimentsmnvalenteОценок пока нет
- Regulator SMDДокумент40 страницRegulator SMDkachappilly2012Оценок пока нет
- SLS11Документ27 страницSLS11maneeshОценок пока нет
- Project Musical SirenДокумент10 страницProject Musical Sirenvinod kapateОценок пока нет
- Chip Finish Icc TCLДокумент5 страницChip Finish Icc TCLgenx142Оценок пока нет
- Homework Assignment #1 Solutions: EE 477 Spring 2017 Professor ParkerДокумент12 страницHomework Assignment #1 Solutions: EE 477 Spring 2017 Professor Parkertooba mukhtarОценок пока нет
- Lesson 7 Insulated Gate Bipolar Transistor (IGBT)Документ23 страницыLesson 7 Insulated Gate Bipolar Transistor (IGBT)Chacko MathewОценок пока нет
- Aktetv 4 NR 2Документ200 страницAktetv 4 NR 2edisanila100% (1)
- Aluminum Lithium Alloy Welding Process FeaturesДокумент82 страницыAluminum Lithium Alloy Welding Process FeaturesMitone DiazОценок пока нет
- Electronics Digest 1987 Summer PDFДокумент89 страницElectronics Digest 1987 Summer PDFAmado ZambranoОценок пока нет
- Vacon Operation ManualДокумент114 страницVacon Operation ManualZeshan Zaidi100% (1)
- ECA 2markДокумент4 страницыECA 2markthangarajelectresОценок пока нет
- Revised Full Wave RectifierДокумент28 страницRevised Full Wave RectifierSiddhartha SatyakamaОценок пока нет
- Count Down CounterДокумент2 страницыCount Down CounterJose GarciaОценок пока нет
- Max291 Max296Документ10 страницMax291 Max296William PaulОценок пока нет
- 35kW Active Rectifier PDFДокумент6 страниц35kW Active Rectifier PDFKashifОценок пока нет
- Description: Princeton Technology CorpДокумент5 страницDescription: Princeton Technology CorpReynaldo CastilloОценок пока нет
- Asubar - Part 20 - ComputerДокумент17 страницAsubar - Part 20 - ComputerEmmanuel RapadaОценок пока нет
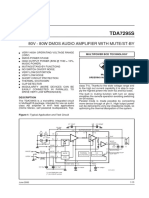
- TDA7295S: 80V - 80W Dmos Audio Amplifier With Mute/St-ByДокумент13 страницTDA7295S: 80V - 80W Dmos Audio Amplifier With Mute/St-ByLucio DeschiОценок пока нет
- Microcap ManualДокумент254 страницыMicrocap ManualdmlottoОценок пока нет