Академический Документы
Профессиональный Документы
Культура Документы
KF 4081
Загружено:
Anonymous JWBvoLОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
KF 4081
Загружено:
Anonymous JWBvoLАвторское право:
Доступные форматы
SVEUILITE U ZAGREBU FAKULTET ELEKTROTEHNIKE I RAUNARSTVA
eljko Zebi
ELEKTROMEHANIKE OSCILACIJE CIJEVNIH HIDROAGREGATA
Magistarski rad
Zagreb, 2006.
Magistarski rad je izraen u Zavodu za elektrostrojarstvo i automatizaciju Fakulteta elektrotehnike i raunarstva
Mentor: prof.dr.sc. Zlatko Maljkovi Magistarski rad ima 75 listova.
Sadraj:
1. 2.
Uvod................................................................................................................................... 1 Matematiki model sinkronog generatora s istaknutim polovima .............................. 2
2.1. 2.2.
2.2.1. 2.2.2. 2.2.3.
Dinamiki matematiki model sinkronog generatora s istaknutim polovima........................ 2 Linearizirani matematiki model sinkronog generatora s istaknutim polovima .................... 7
Model s prigunim namotom ........................................................................................................... 8 Model bez prigunog namota ........................................................................................................ 13 Odreivanje varijabli stanja u stacionarnoj radnoj toki ............................................................. 14
2.3.
2.3.1. 2.3.2.
Usporedba odziva dobivenih nelinearnim i linearnim modelom sinkronog stroja .............. 15
Promjena momenta u praznom hodu............................................................................................. 16 Promjena momenta u nazivnoj radnoj toki.................................................................................. 18
3.
Sinkronizacijski koeficijent momenta i vlastita frekvencija ...................................... 21
3.1.
3.1.1. 3.1.2.
Izraun vlastitih vrijednosti agregata u radnoj toki ............................................................ 21
Izraun vlastitih vrijednosti modelom s prigunim namotom........................................................ 21 Izraun vlastitih vrijednosti modelom bez prigunog namota....................................................... 23
3.2.
3.2.1. 3.2.2. 3.2.3.
Izraun sinkronizacijskog koeficijenta momenta i vlastite frekvencije agregata iz statike momentne karakteristike sinkronog generatora ................................................................... 24
Sinkronizacijski koeficijent momenta ............................................................................................ 24 Sinkronizacijski koeficijent momenta uz zanemarenje otpora statora........................................... 26 Vlastita frekvencija agregata ........................................................................................................ 28
3.3.
3.3.1. 3.3.2.
Izraun sinkronizacijskog koeficijenta momenta i vlastite frekvencije iz dinamike momentne karakteristike ...................................................................................................... 29
Dinamika momentna karakteristika i usporedba sa statikom momentnom karakteristikom...... 29 Izraun dinamikog koeficijenta sinkronizacijskog momenta i vlastite frekvencije ...................... 32
3.4.
3.4.1. 3.4.2. 3.4.3.
Izraun vlastitih frekvencija agregata na temelju vlastitih vrijednosti................................. 33
Koeficijent priguenja i frekvencije nepriguenih i priguenih vlastitih oscilacija....................... 33 Usporedba modela sa i bez prigunog namota uz konstantnu struju uzbude ................................ 34 Izraun koeficijenta priguenja i frekvencija nepriguenih i priguenih vlastitih oscilacija u nazivnoj radnoj toki..................................................................................................................... 36
3.5.
3.5.1. 3.5.2. 3.5.3.
Prijenosne funkcije i frekvencijski odziv agregata .............................................................. 37
Postupak odreivanja prijenosne funkcije .................................................................................... 37 Prijenosna funkcija kuta optereenja............................................................................................ 38 Amplitudna i fazna frekvencijska karakteristika kuta optereenja................................................ 38
4.
Eksperimentalni rezultati mjerenja u HE Dubrava ................................................... 43
4.1.
4.1.1. 4.1.2.
Mjerenja u stacionarnom stanju ........................................................................................... 44
Agregat A ...................................................................................................................................... 44 Agregat B ...................................................................................................................................... 46
4.2.
4.2.1. 4.2.2.
Mjerenja prijelaznih pojava ................................................................................................. 48
Agregat A ...................................................................................................................................... 48 Agregat B ...................................................................................................................................... 51
4.3.
4.3.1.
Utjecaj radne toke agregata na iznos mehanike vremenske konstante ............................. 55
Agregat A ...................................................................................................................................... 55
4.3.2.
Agregat B ...................................................................................................................................... 58
4.4.
Podaci ispitivanih agregata .................................................................................................. 61
Agregat A ...................................................................................................................................... 64 Agregat B ...................................................................................................................................... 66
5.
Usporedba rezultata prorauna sa rezultatima mjerenja .......................................... 64
5.1.1. 5.1.2.
6. 7. 8. 9. 10.
Zakljuak ........................................................................................................................ 68 Saetak............................................................................................................................. 69 Popis oznaka ................................................................................................................... 70 Literatura........................................................................................................................ 73 ivotopis.......................................................................................................................... 75
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1. Uvod
Hidrogeneratori, odnosno generatori s istaknutim polovima grade se za velike raspone snaga (do 800 MVA) i brzina. Cijevni hidroagregati grade se za manje snage (do 100 MVA) i koriste se kod vodnih tokova s malim padovima. Za razliku od klasinih hidrogeneratora pogonjenih vodenim turbinama cijevni generator smjeten je u zabrtvljeno kuite i potopljen u protoni trakt zajedno s nizvodno smjetenom turbinom. Vanjski promjer kuita prilagoava se hidraulikim zahtjevima. Takav koncept zahtijeva posebnu konstrukciju rotora i statora, nain hlaenja i ventilacije, brtvljenja , odravanja i dr. Broj okretaja takvih cijevnih agregata najee se kree u granicama od 50 do 200 okretaja u minuti ili izraeno u Hz, od 0,83 do 3,33 Hz. Vlastita frekvencija elektromehanikih oscilacija hidrogeneratora u praznom hodu je u granicama od 0,5 do 2 Hz, dok cijevni agregati imaju neto vee vrijednosti, od 2 do 3,5 Hz, zbog manje zamane mase rotora i turbine. Vidljivo je da kod cijevnih agregata moe doi do velike bliskosti vlastite frekvencije s frekvencijom vrtnje to moe dovesti do pojave rezonancije i tetnih utjecaja nekih relativno malih izmjeninih momenata sa strane turbine, uzbude, ali i mree. U radu se razmatraju i usporeuju neki od naina izraunavanja frekvencija vlastitih oscilacija, sinkronizacijskog koeficijenta momenta, te jo nekih veliina karakteristinih za elektromehanike oscilatorne sustave. Naini izraunavanja tih veliina temelje se na matematikom modelu sinkronog generatora. Kod dva instalirana cijevna agregata u HE Dubrava snaga 42 MVA javljaju se njihanja snage kao i ostalih elektromehanikih veliina frekvencijom 2,08 Hz. Ta frekvencija bliska je vlastitoj frekvenciji. Dan je pregled mjerenja izvrenih na agregatima u HE Dubrava te usporedba mjerenja s rezultatima prorauna.
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
2. Matematiki model sinkronog generatora s istaknutim polovima
Sinkroni generatori su najee izvedeni kao trofazni, odnosno s tri armaturna namota na statoru. Na rotoru se jo nalaze uzbudni te dva priguna namota (zapravo se radi o tzv. prigunom kavezu). Strujno naponske prilike u tim namotima odreene su sa 6 naponskih jednadbi koje su prijelaznim stanjima zapravo diferencijalne jednadbe. U originalnom koordinatnom sustavu u tim jednadbama pojavljuju se induktiviteti i meuinduktiviteti koji su gotovo svi ovisni o poloaju rotora pa te jednadbe postaju nezgodne za praktinu upotrebu. Zbog toga se sustav jednadbi iz originalnog koordinatnog sustava transformiraju u rotirajui d-q sustav. Taj sustav rotira zajedno s rotorom i u prijelaznim stanjima njegova brzina u odnosu na stator se mijenja. Takav sustav jednadbi zajedno s jednadbama koje opisuju mehaniku brzinu rotora te ulananih magnetskih tokova zovemo matematikim modelom generatora u d-q sustavu. Do nedavno koristio se d-q sustav u kojemu q os prethodi za 90 stupnjeva. U radu je koriten d-q sustav u kojem d os prethodi q osi za 90 stupnjeva. 2.1. Dinamiki matematiki model sinkronog generatora s istaknutim polovima Naponske jednadbe sinkronog stroja s istaknutim polovima i prigunim namotima u rotorskom d-q sustavu. u apsolutnim vrijednostima glase [L1]:
u d = rs id + d d + q dt
(2.1)
u f = rf i f +
0 = rD i D +
d f dt
(2.2)
d D dt
(2.3) d
u q = rs iq + 0 = rQ iQ +
d q dt
(2.4)
d Q dt
(2.5)
Jednadbe ulananih magnetskih tokova glase:
d = Ld id + L fd i f + LDd i D f = Ldf id + L f i f + LDf i D
(2.6) (2.7) (2.8)
D = LdD id + L fD i f + LD i D
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
q = Lq iq + LQq iQ Q = LqQ iq + LQ iQ
Jednadbe koje povezuju elektrine i mehanike veliinama:
(2.9) (2.10)
melm =
3 p( q id d iq ) 2
(2.11) (2.12)
J d = mt + melm p dt d = s dt
(2.13)
Kut optereenja definira se kao kut izmeu vektora napona statora u s i vektora unutarnjeg induciranog napona e0 koji se nalazi u poprenoj osi stroja. Radi lake kontrole rezultata zgodno je sve veliine napisati u jedininim vrijednostima. Jedino emo vrijeme ostaviti u sekundama. Svaka veliina moe se prikazati u obliku: Vapsolutno = V jedinicno Vbazno Ako za bazne vrijednosti izaberemo: U B = 2 U Nfazno I B = 2 I Nfazno (2.15) (2.16) (2.14)
SB = SN =
ZB = LB = UB IB
3 U B IB 2
(2.17) (2.18)
ZB
(2.19) (2.20) (2.21)
B = N
B =
TB =
UB
B
1
(2.22)
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
MB = p
SB
(2.23)
Ako sada prema (2.14) izvrimo supstitucije svih veliina (osim vremena) u (2.5), dobivamo:
u d U B = rs Z B id I B +
d( d B ) dt
+ B q B
(2.24)
Uvrtavanjem (2.18) i (2.21) u prethodnu jednadbu dobiva se:
u d U B = rs
d d U B UB U id I B + + B q B dt B IB B
(2.25)
Skraivanjem dobivamo: u d = rs id + 1 d d + q B dt (2.26)
Ako za jednadbe (2.2-2.5) ponovimo isti postupak dobivamo:
u f = rf i f + 1 d f B dt
(2.27)
0 = rD i D +
1 d D B dt
1 d q d B dt
(2.28)
u q = rs iq +
(2.29)
0 = rQ iQ +
1 d Q B dt
(2.30)
Ako napravimo zamjenu apsolutnih vrijednosti i u jednadbama ulananih magnetskih tokova, nakon sreivanja dobivamo:
d = Ld id + L fd i f + LDd iD f = Ldf id + L f i f + LDf i D D = LdD id + L fD i f + LD iD q = Lq iq + LQq iQ
(2.31) (2.32) (2.33) (2.34)
4
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Q = LqQ iq + LQ iQ
(2.35)
Ostaje nam jo samo jednadbe (2.11 do 2.13) napisati koristei relativne vrijednosti: melm = ( q id d iq ) Tm d = mt + melm dt (2.36) (2.37)
d = s dt
(2.38)
gdje je Tm mehanika vremenska konstanta izraena u sekundama, a moe se izraunati prema izrazu:
2 J B Tm = 2 p SB
(2.39)
Sustav jednadbi tokova (2.31 do 2.35) moe se napisati matrino i to tako da sustav podijelimo na dva dijela radi manjih dimenzija matrica induktiviteta i lakeg raunanja inverznih matrica induktiviteta.
id d i f f = i D D
(2.40)
q iq = Q iQ
(2.41)
gdje su i matrice induktiviteta za uzdunu i poprenu os:
Ld Ldf = LdD L fd Lf LDf LDd LDf LD
(2.42)
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Lq = LqQ
LQq LQ
(2.43)
Uz
pretpostavku
[L1]
da
je
L fd = Ldf = L fD = LDf = LdD = LDd = Lad
te
LqQ = LQq = Laq , gdje su Lad = Ld Ls i Laq = Lq Ls , moe se napisati:
Ld Lad = Lad Lad Lf Lad Lad Lad LD
(2.44)
Lq = Laq
Laq LQ
(2.45)
Sada se iz jednadbi tokova lako mogu izraziti struje:
i d d i f f 1 = i D D
(2.46)
q iq 1 = Q iQ
(2.47)
Jednadbe (2.26 do 2.30) te (2.37) i (2.38) mogu se zapisati na nain koji je pogodniji za simuliranje na raunalu: d d dt
d f dt
= B rs id q u d
= B rf i f + u f
(2.48)
(2.49)
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
d D dt
d q dt
= B rD i D
= B rs iq + d u q
(2.50)
(2.51)
d Q dt
= B rQ iQ
(2.52) (2.53)
d = B s dt
d 1 = mt + melm dt Tm
(2.54)
Ako u gornje jednadbe uvrstimo dobivene izraze za struje (2.46) i (2.47) dobivamo sustav u kojemu smo se rijeili struja kao nepoznanica; d d dt
d f dt
= B rs (A111 d + A121 f + A131 D ) q u d
(2.55)
1 1 1 = B r f (A21 d + A22 f + A23 D ) + u f
(2.56)
d D dt
d q dt d Q dt
= B rD (A311 d + A321 f + A331 D )
(2.57)
= B rs (B111 q + B121 Q ) + d u q
(2.58)
1 1 = B rQ B21 q + B22 Q
(2.59) (2.60)
d = B s dt
d 1 = q (A111 d + A121 f + A131 D ) d (B111 q + B121 Q ) + mt dt Tm
(2.61)
2.2. Linearizirani matematiki model sinkronog generatora s istaknutim polovima
Gornji sustav diferencijalnih jednadbi koji opisuje ponaanje sinkronog stroja s istaknutim polovima u dinamikim uvjetima je nelinearan jer se u njemu pojavljuju umnoci pojedinih promjenljivih veliina. Ipak, taj sustav moe se linearizirati u okolini neke radne 7
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
toke. Naime, svaka varijabla u gornjem sustavu jednadbi moe se tada napisati kao zbroj vrijednosti u stacionarnom stanju i male promjene uzrokovane malim pomakom iz te radne toke: Neka je vi varijabla tog sustava, a vi mala promjena te varijable u okolini radne toke. Tada se trenutna vrijednost te varijable moe zapisati kao
vi = Vi 0 + vi
(2.62)
gdje je Vi 0 vrijednost varijable u stacionarnoj radnoj toki.
2.2.1. Model s prigunim namotom
Ako (62) primijenimo
d (d 0 + d ) dt
rs A111 (d 0 + d ) + A121 ( f 0 + f ) + A131 (D 0 + D ) = B (0 + ) (q 0 + q ) (u d 0 + u d )
(2.63)
d d 0 dt
d d dt
rs A111 d 0 + A121 f 0 + A131 D 0 0 q 0 u d 0 = B rs A111 d + A121 f + A131 D 0 q q 0 q u d
( (
(2.64)
Prvi lan na lijevoj strani te gornji redak desne strane jednadbe predstavljaju stacionarnu toku pa se ti lanovi ponitavaju. Produkte malih promjena, npr., q , moemo zanemariti pa iz gornje jednadbe dobivamo:
d d dt
= B rs A111 d + A121 f + A131 D 0 q q 0 u d
[ (
(2.65)
Napravimo isto i s jednadbama (2.56 do 2.61):
d f dt
1 1 1 = B r f (A21 d + A22 f + A23 D ) + u f
(2.66)
d D dt
d q dt d Q dt
= B rD (A311 d + A321 f + A331 D )
(2.67)
= B rs (B111 q + B121 Q ) + 0 d + d 0 u q
(2.68)
1 1 = B rQ B21 q + B22 Q
(2.69)
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
d = B s dt
(2.70)
A111 q 0 B111 q 0 B121 Q 0 d + A121 q 0 f + d 1 = + A131 q 0 D + A111 d 0 + A121 f 0 + A131 D 0 B111 d 0 q Tm dt B 1 + m Q t 12 d 0
(2.71)
Gornji sustav linearnih diferencijalnih jednadbi sada se moe napisati u matrinom obliku:
X = C X + D U
(2.72)
gdje su:
XXC
matrica derivacija varijabli stanja matrica varijabli stanja matrica koeficijenata varijabli stanja matrica koeficijenata ulaznih varijabli matrica ulaznih varijabli
DU-
d d dt d f dt d D dt d q X= dt d Q dt d dt d dt
(2.73)
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
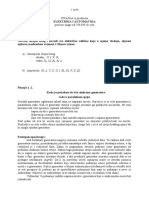
Kako bi se mogle valjano izraziti i preostale matrice potrebno je na odgovarajui nain zapisati i u d i u q Prema slici 1.1 proizlazi:
u d = u s sin
(2.74)
u q = u s cos
gdje je u s napon statora. Koristimo postupak linearizacije:
u d 0 + u d = (u s 0 + u s ) sin( 0 + )
(2.75)
u q 0 + u q = (u s 0 + u s ) cos( 0 + )
Nakon sreivanja koristei adicione formule i priblienja:
cos( ) = 1
sin( ) = dobivamo:
u d = u s sin 0 u s 0 cos 0
(2.76)
u q = u s cos 0 u s 0 sin 0
q
e0
ud
uq
us
is
iq
id
if
d
Slika 2.1 Fazorski dijagram sinkronog generatora
sada moemo izraziti matricu C kao:
10
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
B 0 B rs A111 B rs A121 B rs A131 0 B u s 0 cos 0 B q 0 1 1 1 B r f A21 B r f A22 B r f A23 0 0 0 0 1 1 1 B rD A31 B rD A32 B rD A33 0 0 0 0 1 1 B 0 B d 0 B rs B11 B rs B12 B u s 0 sin 0 0 0 C= 1 1 B rQ B21 B rQ B22 0 0 0 0 0 B 0 0 0 0 0 0 1 1 1 1 1 q 0 A111 q 0 B111 Q 0 B121 q 0 A121 q 0 A131 d 0 A111 + f 0 A121 + D 0 A131 d 0 B111 d 0 B121 0 0 Tm Tm Tm Tm Tm
(2.77)
11
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Matrica varijabli stanja: d f D X = q Q Matrica koeficijenata ulaznih varijabli D i vektor ulaznih varijabli U: 0 0 0 B sin 0 0 B 0 0 0 0 1 0 0 0 0 B cos 0 D= 0 0 0 0 0 0 0 0 0 0 0 0
u s u f 0 U = u s 0 s mt
(2.78)
0 0 0 0 0 0 0 0 1 0 0 1 0
0 0 0 0 0 0 1 0 Tm
(2.79)
(2.80)
12
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
2.2.2. Model bez prigunog namota
Dosadanje razmatranje provedeno je uz uzimanje u obzir utjecaja prigunog namota. Ukoliko elimo izostaviti utjecaj prigunog namota matrice X , C, X, D i U gube neke elemente, odnosno poprimaju manje dimenzije:
B 0 B u s 0 cos 0 B q 0 B rs A111 B rs A121 1 1 B r f A21 B r f A22 0 0 0 C= B d 0 B0 0 B rs B111 B u s 0 sin 0 B 0 0 0 0 1 1 1 q 0 A121 d 0 A111 B111 f 0 A121 0 0 q 0 A111 B111 Tm Tm Tm
( (
(2.81)
d f X = q B sin 0 0 0 D= 0 0 0 0 0 B cos 0 0 0 0 0 0 1 0 0 0 0 1 0 Tm
(2.82)
B
0 0 0
(2.83)
u s u f U = u s 0 mt
(2.84)
13
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
2.2.3. Odreivanje varijabli stanja u stacionarnoj radnoj toki
Da bismo mogli izraunati sve elemente matrice C potrebno je odrediti vrijednosti nekih veliina u stacionarnoj radnoj toki. To su: 0 , u s 0 , 0 , d 0 , f 0 , D 0 , q 0 , Q 0 . Pretpostavimo da nam je radna toka zadana radnom snagom ( P0 ), jalovom snagom ( Q0 ) i naponom generatora u s 0 . Krenimo od slijedeih jednadbi: u d = rs id + 1 d d + q B dt (2.85) (2.86) (2.87)
q = Lq iq + Laq iQ
u d = u s sin
Iz slike 2.1 proizlaze izrazi za komponente statorske struje u d i q osi:
id = is cos(90 )
(2.88) (2.89)
iq = is sin(90 )
gdje je is struja statorskog namota. U stacionarnoj radnoj toki gubi se derivacijski lan toka u jednadbi (2.85), kao i drugi lan u jednadbi (2.86) zbog pretpostavke da nema struje u prigunom namotu! Uvrstimo jednadbe (2.86-2.88) u jednadbu (2.85)! u s 0 sin 0 = rs is 0 cos(
0 0 ) + 0 Lq is 0 sin(
0 0 )
(2.90)
Nakon primjene adicionih teorema i dijeljena obje strane sa sin 0 dobiva se: u s 0 = rs i s 0 [cos 0 + sin 0 ctg 0 ] + 0 Lq i s 0 [cos 0 ctg 0 sin 0 ] Sreivanjem gornjeg izraza dobiva se izraz za kut optereenja: tg 0 = (2.91)
0 Lq i s 0 cos 0 rs i s 0 sin 0
u s 0 + rs i s 0 cos 0 + 0 Lq i s 0 sin 0
(2.92)
Struju is 0 i kut 0 moemo izraunati na slijedei nain:
14
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
is 0 =
P02 + Q02 us0
(2.93)
0 = arctg
Q0 P0
(2.94)
Kako bismo mogli odrediti vrijednosti tokova potrebno je izraunati vrijednosti komponenata statorske struje te uzbudnu struju:
id 0 = is 0 cos(90 0 0 )
(2.95) (2.96)
iq 0 = i s 0 sin(90 0 0 )
if 0 = u s 0 cos 0 + rs iq 0 0 Ld id 0 0 Lad
(2.97)
Sada se mogu odrediti i vrijednosti ulananih magnetskih tokova u stacionarnoj radnoj toki:
d 0 = Ld id 0 + Lad i f 0 f 0 = Lad id 0 + L f i f 0 D 0 = Lad id 0 + Lad i f 0 q 0 = Lq iq 0 Q 0 = Laq iq 0
Sada su poznate sve veliine za izraun elemenata matrice C
(2.98) (2.99) (2.100) (2.101) (2.102)
2.3. Usporedba odziva dobivenih nelinearnim i linearnim modelom sinkronog stroja
Postavlja se pitanje koliko je linearizirani model toan, odnosno koliko rezultati dobiveni lineariziranim modelom odstupaju od rezultata dobivenih nelineariziranim modelom. U tu svrhu napravljen je simulacijski model nelineariziranog sinkronog generatora u MatLab Simulinku. Izvrene su simulacije uz step i sinusnu promjenu momenta na osovini generatora. Slika 2.2 prikazuje rezultate uz pozitivni step momenta mt = 0,1 p.u. u t = 2 s, negativni step momenta mt = 0,1 p.u. u t = 4 s, te sinusnu promjenu momenta
15
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
mt = 0,1sin( 2,08 2 t ) u vremenu t = 6 8 s. Prikazani su odzivi kuta optereenja za
nelinearni model koji ukljuuje priguni namot te za linearne modele od kojih jedan uzima, a drugi ne uzima u obzir utjecaj djelovanja prigunog namota. Kut optereenja dobiven linearnim modelom koji ne uzima u obzir djelovanje prigunog namota u dinamikim uvjetima daje slabe rezultate ve pri mali promjenama momenta na osovini i u praznom hodu (slika 2.2) pa nee biti prikazan na slijedeih nekoliko slika kako bi se bolje uoila razlika izmeu nelinearnog i linearnog modela koji uzimaju u obzir djelovanje prigunog namota. Frekvencija sinusne promjene momenta od 2,08 Hz uzeta je iz razloga to je brzina vrtnje agregata 125 okretaja u minuti, odnosno 2,08 Hz pa se na osovini agregata oekuju promjene momenta upravo te frekvencije.
2.3.1. Promjena momenta u praznom hodu
0.4
0.3
0.2
0.1
mt fp.u.], []
-0.1
mt
-0.2
nelinearni linearni bez prigunog namota
-0.3
s prigunim namotom
0 1 2 3 4 5 6 7 8 9 10
-0.4
t [s]
Slika 2.2 Promjena kuta optereenja za prazni hod i mt = 0,1 p.u.
Slika 2.3 prikazuje isto to i slika 2.2, ali bez prikaza rezultata simulacije za linearni model bez uzimanja u obzir prigunog namota. Na slici je vidljivo kako linearni model i nelinearni model koji uzimaju u obzir djelovanje prigunog namota daju gotovo identine rezultate. Model bez prigunog namota relativno se dobro slae s ostala dva modela samo po frekvenciji, ali zbog malog priguenja oscilacije imaju veliku amplitudu i slabo se priguuju.
16
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
0.15
0.1
0.05 mt [p.u.], [rad]
-0.05
mt
nelinearni linearni
-0.1
-0.15 0
5 t[s]
10
Slika 2.3 Promjena kuta optereenja za prazni hod i mt = 0,1 p.u.
0.4 0.3 0.2 0.1 0 -0.1 -0.2 -0.3 -0.4 0
mt [p.u.], [rad]
mt
nelinearni linearni
5 t[s]
10
Slika 2.4 Promjena kuta optereenja za prazni hod i mt = 0,35 p.u.
Na slici 2.4 prikazan je odziv kuta optereenja uz step promjenu momenta mt = 0,35 p.u. i sinusnu promjenu momenta mt = 0,35 sin( 2,08 2 t ) p.u. uz poetne uvjete praznog hoda. Podudaranje odziva je jo uvijek zadovoljavajue iako se ve radi o znaajnoj promjeni momenta. Na slici 2.5 prikazan je kut optereenja uz step promjenu momenta mt = 0,95 p.u. i sinusnu promjenu momenta mt = 0,95 sin( 2,08 2 t ) p.u. uz poetne uvjete praznog hoda. 17
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1.5
0.5 mt [p.u.], [rad]
-0.5
mt
nelinearni linearni
-1
-1.5 0
5 t[s]
10
Slika 2.5 Promjena kuta optereenja za prazni hod i mt = 0,95 p.u.
U ovom sluaju dolazi do znaajnih razlika u rezultatima dobivenim pomou ovih dvaju modela. Prema linearnom modelu sinkroni generator i dalje ostaje u sinkronizmu dok se kod nelinearnog modela vidi kako kut optereenja kontinuirano raste kod step porasta momenta pa sinkroni stroj tei ka ispadu iz sinkronizma jer generator ne moe postii nazivnu radnu snagu uz uzbudnu struju praznog hoda.
2.3.2. Promjena momenta u nazivnoj radnoj toki
1.1
0.9 mt [p.u.], [rad]
0.8
mt
nelinearni linearni
0.7
0.6
0.5 0
5 t [s]
10
Slika 2.6. Promjena kuta optereenja za nazivnu radnu toku i mt = 0,1 p.u.
18
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Na slici 2.6 prikazan je odziv kuta optereenja uz step promjenu momenta mt = 0.1 p.u. i sinusnu promjenu momenta mt = 0,1sin( 2,08 2 t ) p.u. uz poetne uvjete nazivne radne toke. Podudaranje odziva je jo uvijek zadovoljavajue iako se moe uoiti kako je razlika u nazivnoj toki za istu promjenu momenta puno uoljivija nego za poetne uvjete praznog hoda.
1.3 1.2 1.1 1 mt [p.u.], [rad] 0.9 0.8 0.7 0.6 0.5 0.4 0 mt
nelinearni linearni
5 t [s]
10
Slika 2.7. Promjena kuta optereenja za nazivnu radnu toku i mt = 0,35 p.u.
Na slici 2.7 prikazan je odziv kuta optereenja za step promjenu momenta 0,35 p.u. i sinusnu promjenu momenta mt = 0,35 sin( 2,08 2 t ) p.u. uz poetne uvjete nazivne radne toke. U nazivnoj toki uoavamo pojavljivanje razlike na istim mjestima u odzivu kao i kod praznog hoda ali za promjenu momenta mt = 0,95 . U ostalim dijelovima poklapanje je zadovoljavajue. Do razlika dolazi zbog toga to bi kut optereenja prelazio prekretni kut u novoj radnoj toki, a linearni model to ne moe uzeti u obzir. Do sada smo promatrali promjenu kuta optereenja uz sinusnu promjenu momenta na osovini frekvencije 2,08 Hz. Pogledajmo kako izgleda promjena kuta optereenja uz sinusnu promjenu momenta na osovini, ali neto vie frekvencije: Na slici 2.8 prikazan je odziv kuta optereenja za step promjenu momenta 0,35 p.u. i sinusnu promjenu momenta mt = 0,35 sin(10 2 t ) p.u. uz poetne uvjete nazivne radne toke. Frekvencija sinusne promjene momenta iznosi 10 Hz. Moe se uoiti kako su amplitude kuta optereenja manje u ovom sluaju nego kod frekvencije od 2,08 Hz. To je posljedica jaeg priguenja nekih frekvencija (poglavlje 3.5). Na kraju, moe se rei kako linearizirani model moe zadovoljavajue zamijeniti nelinearni model ukoliko promjene ulaznog momenta nisu prevelike. Budui da nas u ovom 19
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
sluaju zanimaju amplitude sinusnog momenta iznosa manjeg od 10% nazivne vrijednosti, koritenje lineariziranog modela je opravdano.
1.3 1.2 1.1 mt [p.u.], [rad] 1 0.9 mt 0.8 0.7 0.6 0.5 0
nelinearni linearni
5 t [s]
10
Slika 2.8 Promjena kuta optereenja za nazivnu radnu toku i mt = 0,35 p.u. i frekvenciju sinusne promjene momenta 10 Hz
20
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
3. Sinkronizacijski koeficijent momenta i vlastita frekvencija
3.1. Izraun vlastitih vrijednosti agregata u radnoj toki
Karakteristina jednadba sustava diferencijalnih jednadbi jednaka je karakteristinoj jednadbi matrice C, a moe se izraziti na slijedei nain [L2]: det(I C ) = 0 (3.1)
I je jedinina matrica, a su korijeni karakteristine jednadbe odnosno vlastite
vrijednosti. Vlastite vrijednosti mogu biti realni ili kompleksni brojevi. Kada se radi o kompleksnim vlastitim vrijednostima one se pojavljuju kao par konjugirano kompleksnih veliina. Pojavljivanje parova konjugirano kompleksnih veliina govori o oscilatornom karakteru varijabli stanja u dinamici. Negativni realni dijelovi odgovaraju varijablama stanja, odnosno njihovim slobodnim komponentama koje s vremenom opadaju aperiodino ili oscilirajui. Pozitivni realni dijelovi naznauju eksponencijalni porast s vremenom, tj. nestabilno stanje. Rezultati prorauna matrice C daju osnovni odgovor na pitanje stabilnosti sustava u promatranoj radnoj toki.
3.1.1. Izraun vlastitih vrijednosti modelom s prigunim namotom
Izraunajmo vlastite vrijednosti u nazivnoj radnoj toki generatora. Najprije je potrebno izraunati stacionarne vrijednosti pojedinih varijabli kako je objanjeno u poglavlju 2.2.3.. Za nazivnu radnu toku vrijedi: u s0 = 1 is 0 = 1
0 = 0.6rad = 34,398
id 0 = 0,7943 iq 0 = 0,6075
d 0 = 0,8928 f 0 = 1,4511 D 0 = 1,0228 q 0 = 0,5710 Q 0 = 0,4234
(3.2)
Osim kuta optereenja 0 , sve ostale veliine iskazane su u jedininim vrijednostima.
21
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Nakon uvrtenja poetnih vrijednosti u matricu C dobivamo: 2,5501 4,1670 314,1593 0 259,2229 179,3927 7,2923 0,8629 2,4303 1,3773 0 0 0 0 0,0157 0,0153 0,0345 0 0 0 0 C = 314,1593 0 0 5,3676 177,4811 260,6847 (3.3) 6,5401 0 0 0 0,0202 0,0273 0 0 0 0 0 0 0 0 314,1593 0,9573 0,5159 0,8430 1,5779 0 0 2,5997 Raunanje vlastitih vrijednosti matrice C obavljen je pomou programskog paketa MatLab koritenjem naredbe eig(C). Vlastite vrijednosti matrice C uz poetne uvjete toke praznog hoda su slijedee:
1, 2 = 6,921 313,88 j 3, 4 = 6,459 22,39 j 5 = 35,145 6 = 14,321 7 = 1,784
(3.4)
Konjugirano kompleksni par 1, 2 naziva se statorska vlastita vrijednost. Statorska vlastita vrijednost povezana je s promjenom ulananog toka statorskog namota. Ona zapravo definira karakter slobodne komponente u tome toku. Imaginarni dio statorske vlastite vrijednosti odgovara krunoj frekvenciji sinkrone brzine vrtnje. Realni dio statorske vlastite vrijednosti slae se s faktorom priguenja izmjenine komponente ulananog toka statora, odnosno odgovara recipronoj vrijednosti poetne vremenske konstante [L2]:
L"d + L"q rs B 1 = = 6,916 Ts" 2 L"d L"q
(3.5)
Drugi konjugirano kompleksni par 3, 4 je dominantna vlastita vrijednost sinkronog stroja i naziva se jo i rotorska vlastita vrijednost. Za razliku od statorske vrijednosti rotorska vrijednost vezana je za pojedinu radnu toku generatora, drugim rijeima, rotorska vrijednost sinkronog stroja nije odreena samo parametrima generatora ve i radnom tokom u kojoj generator radi. Rotorska vlastita vrijednost na neki nain opisuje oscilacije rotora, tj. frekvenciju i priguenje oscilacija rotora u odnosu na krutu mreu. Rotorska vlastita vrijednost moe se zapisati na slijedei nain:
22
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
3, 4 = vl vl 1 2 j
(3.6)
gdje je vl vlastita kruna frekvencija nepriguenih oscilacija, a koeficijent priguenja. Imaginarni dio rotorske vlastite vrijednosti je zapravo vlastita kruna frekvencija priguenih oscilacija:
vlpr = vl 1 2
i uvijek je neto manja od vlastite frekvencije nepriguenih oscilacija.
(3.7)
Realne vlastite vrijednosti 5 i 7 vezane su za promjene toka prigunog uzbudnog namota. U praznom hodu one su gotovo jednake negativnim recipronim vrijednostima vremenskih konstanti:
5 =
i
1 = 34,483 Td"
(3.8)
7 =
1 = 1,818 Td'
(3.9)
Realna vlastita vrijednost 6 vezana je za djelovanje prigunog i uzbudnog namota u asinkronom reimu rada i ne moe se povezati s nekom od standardnih vremenskih konstanti sinkronog stroja.
3.1.2. Izraun vlastitih vrijednosti modelom bez prigunog namota
Izraunali smo vlastite vrijednosti sinkronog generatora pomou lineariziranog modela koji uzima u obzir utjecaj prigunog namota. Uinimo to isto, ali uz zanemarenje utjecaja prigunog namota. Sada je matrica C dimenzija 5 5 i vrijednosti njenih elemenata su slijedee: 4,4026 314,1593 314,1593 0,0059 5,3957 1,4848 0 0 0 1,8180 C = 314,1593 0 0,0054 314,1593 2,5601 0 0 0 314,1593 314,1593 1,885 10 5 2,932 10 5 0 0 0,9069 Ovoga puta matrica C ima 5 vlastitih vrijednosti:
(3.10)
23
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1, 2 = 3,981 314,15 j 3, 4 = 0,0038 16,8784 j 5 = 1,818
Imaginarni dio statorske vlastite vrijednosti gotovo da se i nije promijenio dok se za realni dio to ne moe rei. Kao to je ve reeno realni dio statorske vlastite vrijednosti vezan je za stupanj priguenja, odnosno za vremenske konstante koje ukljuuju i priguni namot. Ne uzimanjem prigunog namota u obzir promijenio se i realni dio statorske vlastite vrijednosti. Kod rotorske vlastite vrijednosti promijenili su se i realni i imaginarni dio. Smanjivanje iznosa realnog dijela koji je jo postao i pozitivan bilo je za oekivati jer je vezan za stupanj priguenja. Meutim, smanjio se i imaginarni dio, a to znai da se smanjila i vlastita frekvencija rotorskih oscilacija. Od triju realnih vlastitih vrijednosti ostala je realna vlastita vrijednost 7 , odnosno 5 koja je vezana za djelovanje uzbudnog namota. i nije se znaajnije promijenila.
3.2. Izraun sinkronizacijskog koeficijenta momenta i vlastite frekvencije agregata iz statike momentne karakteristike sinkronog generatora
(3.11)
Kada sinkroni generator radi u nekoj stacionarnoj radnoj toki uspostavljena je ravnotea vanjskog momenta na osovini i elektromagnetskog momenta generatora. Kaemo kako generator radi pri nekom kutu optereenja 0 . Ukoliko sa strane osovine doe bilo kakav poremeaj u narinutom momentu, rotor generatora nastojat e postii novi kut optereenja koji e anulirati nastali poremeaj. Prije no to se postigne taj novi ravnoteni poloaj rotor e zatitrati nekoliko puta oko svog novog ravnotenog poloaja (kuta optereenja). Takva njihanja nazivaju se elektromehanikim oscilacijama sinkronog generatora. Ukoliko se radi o malim poremeajima takve oscilacije se mogu relativno lako proraunati jer se krivulja ovisnosti momenta o kutu optereenja moe linearizirati oko neke radne toke.
3.2.1. Sinkronizacijski koeficijent momenta
Sinkronizacijski koeficijent momenta definira se kao derivacija momenta po kutu optereenja u nekoj radnoj toki [L1]: d melm ks = d 0 (3.12)
Za vrijeme elektromehanikih oscilacija priguni namot pokuava kompenzirati nastalu neravnoteu pa se u njegovim tapovima induciraju naponi koji uzrokuju protjecanje 24
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
struje. Te struje stvaraju moment koji se protivi njihanju i nastoji dovesti generator u ravnoteni poloaj. Pri malim odstupanjima od sinkrone brzine taj moment, koji se jo naziva i priguni moment, proporcionalan je klizanju: m pr = k d s = k d d dt (3.13)
k d je koeficijent prigunog momenta. Sada se sinkroni generator moe aproksimirati elektromehanikim titrajnim sustavom drugog reda koji se moe opisati slijedeom jednadbom: Tm d 2 d + kd + k s = 0 2 dt B dt (3.14)
Potrebno je odrediti izraz za sinkronizacijski koeficijent momenta ks. Openiti izraz za elektromagnetski moment sinkronog generatora glasi: melm = ( q id d iq ) (3.15)
Da bismo mogli dobiti izraz za izraun sinkronizacijskog koeficijenta momenta potrebno je dobiti izraz za elektromagnetski moment u kojemu je jedina nezavisna varijabla kut optereenja. Uz konstantan napon na stezaljkama generatora i konstantnu uzbudnu struju vrijedi:
q = Lq i q d = Ld id + Lad i f 0
u s 0 sin = rs id + 0 Lq iq u s 0 cos = rs iq 0 Ld id + Lad i f 0
(3.16) (3.17) (3.18)
(3.19)
Iz prethodne dvije jednadbe dobivaju se izrazi sa struje id i iq :
id =
0 Lq u s 0 cos + rs u s 0 sin 02 Lq Lad i f 0
2 rs2 + 0 Lq Ld
(3.20)
iq =
0 Ld u s 0 sin rs u s 0 cos + 0 rs Lad i f 0
2 rs2 + 0 Lq Ld
(3.21)
A izrazi za d i q sada poprimaju neto sloeniji oblik:
25
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
d =
0 Ld Lq u s 0 cos + rs Ld u s 0 sin + rs2 Lad i f 0
2 rs2 + 0 Lq Ld
(3.22)
q =
0 Ld Lq u s 0 sin rs Lq u s 0 cos + 0 rs Lq Lad i f 0
2 rs2 + 0 Lq Ld
(3.23)
Ako se dobiveni izrazi za struje i ulanane magnetske tokove uvrste u izraz za elektromehaniki moment, dobiva se izraz:
1 2 2 2 2 2 2 2 2 0 Ld Lq + rs Lq 0 Ld Lq + rs Ld u s 0 sin (2 ) + 2 2 + 0 rs Ld Lq Ld u s 0 sin + 2 2 + 0 rs Lq Ld Lq u s 0 cos + 2 2 2 2 + 0 Lad i f 0 rs Lq 0 Ld Lq 2rs Ld u s 0 sin + 2 2 + rs Lad i f 0 2 0 L2 + rs2 0 Ld Lq u s 0 cos q 2 0 rs L2 i 2 0 0 L2 + rs2 ad f q
melm =
(r
1
2 + 0 Ld Lq
2 s
( (
) )
(3.24)
pa za sinkronizacijski koeficijent momenta proizlazi:
2 2 0 Ld L2 + rs2 Lq 0 L2 Lq + rs2 Ld u s20 cos(2 ) + q d + 0 rs L2 L2 u s20 sin (2 ) d q (3.25) 2 0 Lad i f 0 rs2 Lq 0 Ld L2 2rs2 Ld u s 0 cos + q 2 2 + rs Lad i f 0 2 0 L2 + rs2 0 Ld Lq u s 0 sin q
d melm ks = d
1 = 2 2 rs + 0 Ld Lq 0
3.2.2. Sinkronizacijski koeficijent momenta uz zanemarenje otpora statora
Ukoliko se zanemari utjecaj otpora statorskog namota ( rs = 0 ) dobivamo poznate izraze za elektromagnetski moment i sinkronizacijski koeficijent momenta: 0 Lad i f 0 u s 0 1 1 1 1 sin u s20 sin (2 ) Ld 02 2 Ld Lq
melm =
(3.26)
ks =
L i u 1 1 1 2 u cos(2 ) + 0 ad f 0 s 0 cos s0 Ld 02 Lq Ld
(3.27)
26
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Slika 3.1 prikazuje ovisnost elektromagnetskog momenta o kutu optereenja uz konstantni iznos napona na stezaljkama generatora ( u s 0 = 1 p.u.), konstantnu struju uzbude ( i f 0 = 0,5 1,0, 1,5, 2,0, i 2,5 p.u.). Krivulje kojima se uzima u obzir utjecaj otpora namota statora ( rs = 0,00766 p.u.), neto su veeg apsolutnog iznosa od krivulje kod kojih se taj utjecaj zanemaruje ( rs = 0 p.u.). Na slici 3.1 moe se primijetiti kako tek pri veim strujama uzbude ( i f 0 >2,0 p.u.) dolazi do vidljive razlike zbog utjecaja otpora statorskog namota, ali je i dalje ta razlika meu krivuljama manja od 2%. Ta razlika ponajvie je uzrokovana lanom
2 0 rs L2 i 2 0 0 L2 + rs2 u izrazu za elektromagnetski moment i konstantnog je iznosa za ad f q
neku struju uzbude jer ne ovisi o kutu optereenja.
0.5 rs=0.00766 p.u. rs=0 p.u. 0
-0.5 if=0.5 p.u.
melm [p.u.]
-1
if=1.0 p.u.
if=1.5 p.u. -1.5 if=2.0 p.u. -2 if=2.5 p.u. -2.5 0
10
20
30
40
[]
50
60
70
80
90
Slika 3.1. Ovisnost elektromagnetskog momenta o kutu optereenja ()
Iz slike 3.2 moe se zakljuiti kako se utjecaj otpora namota statora na sinkronizacijski koeficijent momenta moe zanemariti jer se praktiki i ne vidi razlika meu krivuljama za
rs = 0 p.u. i rs = 0,00766 p.u. lan koji je unosio razliku u iznosima elektromagnetskih
momenata deriviranjem je nestao pa se i relativna razlika sinkronizacijskih koeficijenata momenta smanjila. Sinkronizacijski koeficijent momenta opada s porastom kuta optereenja i kod prekretnog kuta vrijednost mu pada na nulu. Negativni koeficijent sinkronizacijskog momenta nema fizikalnog smisla budui da nakon prekretnog kuta sinkroni generator ne moe biti u stacionarnoj radnoj toki, sinkroni generator vie nije u sinkronizmu.
27
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
2.5 if=2.5 p.u. 2 if=2.0 p.u. 1.5 if=1.5 p.u. rs=0.00766 p.u. rs=0 p.u.
ks [p.u.]
if=1.0 p.u.
0.5
if=0.5 p.u.
-0.5 0
10
20
30
40
[]
50
60
70
80
90
Slika 3.2 Ovisnost sinkronizacijskog koeficijenta momenta ( k s ) o kutu optereenja ()
3.2.3. Vlastita frekvencija agregata
Iz jednadbe titranja proizlazi da je vlastita frekvencija nepriguenih oscilacija odreena izrazom [L3]:
f vl =
1 ks B 2 Tm
(3.28)
4.5 if=2.5 p.u. 4 if=2.0 p.u. 3.5 3 2.5 if=0.5 p.u. 2 1.5 1 0.5 0 0 if=1.5 p.u. if=1.0 p.u.
fvl [Hz]
10
20
30
40
[]
50
60
70
80
90
Slika 3.3 Ovisnost vlastite frekvencije ( f vl ) o kutu optereenja ()
28
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Na slici 3.3 vidi se kako vlastita frekvencija elektromehanikih oscilacija sinkronog generatora opada porastom kuta optereenja uz konstantnu uzbudnu struju. Porastom kuta optereenja smanjuje se vrijednost sinkronizacijskog momenta, odnosno, smanjuje se krutost elektromagnetskog polja u zranom rasporu, a time i vlastita frekvencija elektromehanikih oscilacija. Prethodno razmatranje izvedeno je uz pretpostavku da se koeficijent sinkronizacijskog momenta izraunava iz statike momentne karakteristike (slika 3.1), a iz tako dobivenog koeficijenta sinkronizacijskog momenta izraunate su vlastite frekvencije osciliranja agregata. Mehanika vremenska konstanta Tm iznosi 1,173 i uzeta je kao konstantna vrijednost iako se u praksi ona mijenja u ovisnosti o radnoj snazi zbog utjecaja vode. Promjena mehanike vremenske konstante zbog utjecaja vode obraena je u poglavlju 4.3. Za nazivnu radnu toku dobivaju se slijedee vrijednosti za sinkronizacijski koeficijent momenta i za frekvenciju vlastitih nepriguenih oscilacija:
k s = 1,2868
f vl = 2.9547 Hz
3.3. Izraun sinkronizacijskog koeficijenta momenta i vlastite frekvencije iz dinamike momentne karakteristike
3.3.1. Dinamika momentna karakteristika momentnom karakteristikom
usporedba
sa
statikom
Postavlja se pitanje daje li proraun vlastitih frekvencija iz statike momentne karakteristike dovoljno tone rezultate. Zato emo vlastite frekvencije osciliranja agregata pokuati izraunati uz dinamike uvjete kakvi zapravo i vladaju prilikom neke prijelazne pojave. Raunanjem vlastitih frekvencija agregata iz statike momentne karakteristike zanemaren je izmeu ostalog i utjecaj prigunog namota pa e ovdje i on biti uzet u obzir. Pogledajmo kako zapravo izgleda dinamika momentna karakteristika. Slika 3.4 prikazuje momentne karakteristike sinkronog generatora. Prikazan je dio statike momentne karakteristike za i f 0 = 0,91 p.u., odnosno za uzbudnu struju koja odgovara uzbudnoj struji praznog hoda. Dinamike momentne karakteristike dobivene su nelinearnim modelom simulacijom u MatLab Simulinku i linearnim modelom koji ukljuuje u obzir i priguni namot. Na slici 3.4 prikazana je i dinamika momentna karakteristika koja je dobivena linearnim modelom koji ne ukljuuje priguni namot. Poetna radna toka A je toka praznog hoda. Zatim je narinut step momenta mt = 0,1 p.u.
29
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
0 A -0.02 -0.04 -0.06 melm [p.u.] -0.08 -0.1 B -0.12 -0.14 -0.16 -0.18
nelinearni model staticka momentna karakteristika linearni model bez prigunog namota linearni model s prigunim namotom
C -0.2 0 2 4 6 [] 8 10
Slika 3.4 Momentne karakteristike sinkronog generatora, prazni hod, mt = 0,1 p. u.
Sve tri dinamike momentne karakteristike zavravaju nakon duljeg ili kraeg istitravanja u toki B koja predstavlja novo ravnoteno stanje, odnosno novu stabilnu radnu toku Vidljivo je kako krivulja dobivena linearnim modelom bez prigunog namota gotovo u potpunosti prati statiku momentnu karakteristiku, dok krivulje dobivene nelinearnim modelom i modelom s prigunim namotom poprilino odstupaju od statike momentne karakteristike. Ako se vratimo na razmatranje u 3.2.1. gdje je reeno kako sinkronizacijski koeficijent momenta derivacija momenta po kutu optereenja, odnosno nagib momentne karakteristike u nekoj radnoj toki: d melm ks = d 0 (3.29)
Na slici 3.4 je vidljivo kako se taj nagib osjetno poveao, a time i sinkronizacijski koeficijent momenta. Poveanjem sinkronizacijskog momenta zapravo se poveala krutost elektromagnetskog polja, a time i frekvencije vlastitih oscilacija. Na slici 3.5 dane su momentne karakteristike za dva iznosa stepa momenta mt = 0,1 i mt = 0,05 p.u. Na prvi pogled ini se kako se nagibi momentnih karakteristika za
mt = 0,1 i mt = 0,05 p. u. razlikuju, meutim, ako se udaljenosti od toke A na pojedinoj
dinamikoj karakteristici normiraju moe se uoiti kako se za jednake odnose
AD '
AB ' dobivaju jednake nagibi momentnih karakteristika. Zakljuujemo kako frekvencija vlastitih oscilacija u poetnom dijelu statike momentne karakteristike, koji se moe aproksimirati 30
AD AB
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
pravcem, nee ovisiti o veliini narinutog momenta ukoliko nova radna toka (B' i B) uvjetovana narinutim momentom nije ''daleko'' od radne toke (A' i A). Vrijede li jednaki zakljuci ukoliko se pomiemo prema nelinearnom dijelu statike momentne karakteristike?
0 A -0.02 -0.04 -0.06 melm [p.u.] -0.08 -0.1 B -0.12 -0.14 -0.16 -0.18 D B' D'
nelinearni model staticka momentna karakteristika linearni model bez prigunog namota linearni model s prigunim namotom
C'
C -0.2 0 2 4 6 [] 8 10
Slika 3.5 Momentne karakteristike, mt = 0,1 p. u. i mt = 0,05 p. u .
Na slici 3.6 prikazane su momentne karakteristike za radnu toku P=0,7 p.u. na momentnoj karakteristici i f 0 = 0,906 p.u. Moe se uoiti kako prethodan zakljuak vrijedi i u ovom sluaju. Isto je tako vidljivo kako u ovom sluaju linearizirani modeli ne ''dolaze'' u novu radnu toku na stacionarnoj karakteristici ve se vide odreena odstupanja.
-0.68 -0.7 -0.72 -0.74 melm [p. u.] -0.76 -0.78 -0.8 -0.82 -0.84 -0.86 -0.88 44 46 48 50 52 54 [] 56
nelinearni model staticka momentna karakteristika linearni model bez prigunog namota linearni model s prigunim namotom
58
60
62
64
Slika 3.6 Momentne karakteristike P=0,7 p.u., i f 0 = 0,906 p.u., mt = 0,1 p. u. i mt = 0,05 p. u .
31
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
3.3.2. Izraun dinamikog koeficijenta sinkronizacijskog momenta i vlastite frekvencije
Koeficijent sinkronizacijskog momenta raunao se na temelju statike momentne karakteristike i definiran je kao: d melm ks = d 0 (3.30)
Isti izraz moe se primijeniti i kod dinamike momentne karakteristike, ali je potrebno poznavati eksplicitne izraze za elektromehaniki moment i kut optereenja. Pokuat emo sa slike 3.7 u grubo odrediti dinamiki koeficijent sinkronizacijskog momenta. Ako se paljivije promotre dinamike momentne karakteristike na slici 3.7 moe se uoiti kako su one poloene pod odreenim nagibom u melm ravnini. Taj nagib zapravo predstavlja koeficijent sinkronizacijskog momenta. Sa slike 3.7 moe se oitati
m = 0,24 p.u
(3.31) (3.32) (3.33) (3.34)
1 = 4,3o 2 = 6o
2 = 0,075 rad 360
2 = 0,105 rad 360 2 = 0,126 rad 360
3 = 7,2o
Sada se mogu izraunati pripadajui koeficijenti sinkronizacijskog momenta: k s1 = ks2 = k s3 = m = 3,198 1 m = 2,292 2 m = 1,91 3 (3.35) (3.36) (3.37)
iz toga slijedi:
f vl1 =
1 1 314 k s1 B = 3,198 = 4,658 Hz Tm 2 2 1,173
(3.38)
32
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
f vl 2 =
1 k s 2 B = 3,942 Hz Tm 2 1 k s 3 B = 3,6 Hz Tm 2
(3.39)
f vl 3 =
(3.40)
Vrijednosti koeficijenta sinkronizacijskog momenta i vlastitih frekvencija dobivenih iz dinamike momentne karakteristike vee su od vrijednosti dobivenih iz statike momentne karakteristike.
-0.95
nelinearni model staticka momentna karakteristika linearni model bez prigunog namota linearni model s prigunim namotom
-1
melm [p.u.]
-1.05
me
-1.1
-1.15 34 35 36 37
1
[]
2
38 39 40
3
41
Slika 3.7 Momentne karakteristike oko nazivne radne toke
3.4. Izraun vlastitih frekvencija agregata na temelju vlastitih vrijednosti
3.4.1. Koeficijent priguenja i frekvencije nepriguenih i priguenih vlastitih oscilacija
Kao to je bilo reeno u poglavlju 3.1 vlastite frekvencije oscilacija mogu se izraunati iz vlastitih vrijednosti sinkronog generatora u nekoj radnoj toki. Za to je mjerodavna rotorska vlastita vrijednost koja je zapravo konjugirano kompleksni par oblika:
3, 4 = vl vlpr j = vl vl 1 2 j = 2 f vl f vl 1 2 j 3, 4 = 2 ( f vl f vlpr j)
)
(3.41)
33
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
gdje su vl i vlpr krune frekvencije nepriguenih i priguenih vlastitih oscilacija, f vl i f vlpr frekvencije nepriguenih i priguenih oscilacije, a je faktor priguenja.
3.4.2. Usporedba modela sa i bez prigunog namota uz konstantnu struju uzbude
Slika 3.8 prikazuje ovisnost vlastitih priguenih i nepriguenih frekvencija o kutu optereenja u konstantnu struju uzbude i f 0 = 2 p.u. Prikazane su krivulje ovisnosti vlastite nepriguene i priguene frekvencije o kutu optereenja dobivene iz vlastitih vrijednosti modela sinkronog stroja koji uzima u obzir utjecaj prigunog namota te krivulje prikazuju ovisnost vlastite nepriguene i priguene frekvencije o kutu optereenja za model sinkronog stroja koji ne uzima u obzir djelovanje prigunog namota. Zbog vrlo malog priguenja te dvije zadnje dvije krivulje su praktino jednake.
5 4.5 4 3.5 3 2.5 2 1.5 1 0.5 0 fvl, linearni model s prigunim namotom fvlpr, linearni model s prigunim namotom fvl, linearni model bez prigunog namota fvlpr, linearni model bez prigunog namota fvl, stacionarna momentna karakteristika 10 20 30
[]
f [Hz]
40
50
60
70
Slika 3.8 Ovisnost vlastitih priguenih i nepriguenih frekvencija o uz i f 0 = 2 p.u.
Na slici 3.8 uoava velika razlika u iznosima vlastitih frekvencija dobivenih na tri naina. Za vee kutove optereenja, kada momentna karakteristika postaje nelinearna primjeuje se razilaenje krivulja. Na slici 3.9 prikazana je ovisnost koeficijenta priguenja o kutu optereenja uz konstantnu struju uzbude i f 0 = 2 p.u. Vidljivo je kako je koeficijent priguenja kod malih kutova optereenja viestruko puta vei za model s prigunim namotom. Poveanjem kuta optereenja ta razlika se smanjuje.
34
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
0.18 0.16 0.14 0.12 0.1
0.08 0.06
, linearni model s prigunim namotom
0.04 0.02 0 0
, linearni model bez prigunog namota
10
20
30
[]
40
50
60
70
Slika 3.9 Ovisnost faktora priguenja o kutu optereenja za i f 0 = 2 p.u.
4 3.5 3 2.5 f [Hz] 2 1.5 fvl, linearni model s prigunim namotom 1 0.5 0 0 fvlpr, linearni model s prigunim namotom fvl, linearni model bez prigunog namota fvlpr, linearni model bez prigunog namota fvl, stacionarna momentna karakteristika 10 20 30
[]
40
50
60
70
Slika 3.10 Ovisnost vlastitih priguenih i nepriguenih frekvencija o uz i f 0 = 0,906 p.u.
Slika 3.10 prikazuje ovisnost vlastitih priguenih i nepriguenih frekvencija o kutu optereenja uz konstantnu struju uzbude praznog hoda i f 0 = 0,906 p.u. Na slici 3.11 prikazana je ovisnost koeficijenta priguenja o kutu optereenja uz konstantnu struju uzbude praznog hoda i f 0 = 0,906 p.u. Usporedbom slike 3.9 i slike 3.11 vidimo da je koeficijent priguenja vei kod manje struje uzbude
35
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
0.35
0.3
0.25
0.2
0.15
0.1
, linearni model s prigunim namotom , linearni model bez prigunog namota
0.05
0 0
10
20
30
[]
40
50
60
70
Slika 3.11 Ovisnost faktora priguenja o kutu optereenja za i f 0 = 0,906 p.u..
3.4.3. Izraun koeficijenta priguenja i frekvencija nepriguenih i priguenih vlastitih oscilacija u nazivnoj radnoj toki.
Za nazivnu radnu toku dobivaju se slijedee vrijednosti vlastitih nepriguenih i priguenih oscilacija te koeficijent priguenja ako se u obzir uzme utjecaj prigunog namota: f vl = 4,1706 Hz f vlpr = 4,1133 Hz (3.42)
(3.43) (3.44)
= 0,1651
Ako se zanemari utjecaj prigunog namota dobivaju se neto nie vrijednosti:
f vl = 3,4642 Hz f vlpr = 3,4640 Hz
(3.55) (3.56) (3.57)
= 0,0109
36
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
3.5. Prijenosne funkcije i frekvencijski odziv agregata
3.5.1. Postupak odreivanja prijenosne funkcije
Vano je vidjeti, ne samo kolika je vlastita frekvencija agregata u nekoj radnoj toki ve i koliko je agregat osjetljiv na poremeaje odreenih frekvencija u toj radnoj toki. U tu svrhu posluit e nam prijenosne funkcije i njihove frekvencijske karakteristike. Pomou lineariziranog matematikog modela sinkronog stroja i uz primjenu teorije linearnih sustava mogue je definirati prijenosnu funkciju za bilo koju izlaznu varijablu po ulaznoj varijabli:
G (p) = y ( p) f u ( p)
(3.58)
gdje je y izlazna varijabla, f u ulazna varijabla, a p Laplaceov operator. Prijenosna funkcija predstavlja omjer jedne izlazne i jedne ulazne varijable uz nulte poetne uvjete. Poetni uvjeti u naem sluaju odreeni su stacionarnom radnom tokom. Sustav (2.72) moe se u Laplaceovom podruju napisati na slijedei nain: pX = C X + D U a izlazni vektor u obliku:
Y = E X + K U
(3.59)
(3.60)
Budui da nam za prijenosnu funkciju prema definiciji trebaju samo po jedna izlazna i jedna ulazna varijabla, izlazni i ulazni vektori bit e zapravo skalari dok e matrica E imati samo jedan redak, matrica D samo jedan stupac, a matrica K e biti skalar koji je ovisan o ulaznoj varijabli. Iz prethodne dvije jednadbe slijedi:
y = E (p I C ) D f u + K f u
1
(3.61)
I predstavlja jedininu matricu, a prijenosna funkcija se sada moe napisati na slijedei nain:
G ( p) =
b p n 1 + bn 1 p n 2 + ... + b2 p + b1 y ( p) 1 = E (p I C ) D + K = n n f u ( p) p + a n p n 1 + ... + a 2 p + a1
(3.62)
Dakle, da bi se dobila prijenosna funkcija potrebno je izraunati koeficijente polinoma u brojniku i nazivniku prijenosne funkcije. Izraun tih koeficijenata je prilino sloen pa je zato koritena funkcija ss2tf MatLab simulacijskog paketa. Sintaksa funkcije ss2tf je slijedea:
37
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
[bi , ai ] = ss 2tf (C, D, E, K )
3.5.2. Prijenosna funkcija kuta optereenja
Kao to je ve reeno eljeli bismo definirati prijenosnu funkciju:
(3.63)
G ( p) =
(p) mt (p)
(3.64)
Potrebno je odrediti elemente matrica C, D, E i K. Elemente matrice C i D ve smo odredili u poglavlju 2.2.
0 0 D= 0 0 1 Tm
(3.65)
Vektor D ima samo jedan stupac budui da je ulazni vektor samo jedna varijabla mt Vektor E ima samo jedan redak:
E = [0 0 0 1 0]
(3.66)
a vektor K koji je zapravo skalar jednak je nuli K = 0
3.5.3. Amplitudna i fazna frekvencijska karakteristika kuta optereenja
Ako u prijenosnu funkciju (3.64) umjesto Laplaceovog operatora uvrstimo j dobit emo frekvencijsku karakteristiku
G ( j ) =
( j ) mt ( j )
(3.67)
Apsolutni iznos frekvencijske karakteristike:
G ( j ) =
( j ) mt ( j )
(3.68)
38
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
karakteristike mjerodavan je za pojaanje amplitude kod odreene frekvencije.
1.5
1 |G (jw)| 0.5 0 0
5 f [Hz]
10
Slika 3.12 Frekvencijska karakteristika sinkronog generatora za nazivnu radnu toku
Na slici 3.12 prikazana je frekvencijska karakteristika kuta optereenja sinkronog generatora za nazivnu radnu toku. Vidi se kako je pojaanje najvee kod frekvencije od oko 4 Hz (tonije 4.036 Hz). Za tu frekvenciju (rezonantna frekvencija) promjene momenta na osovini kut optereenja generatora oscilira s najveom amplitudom u odnosu na amplitudu momenta na osovini. Amplituda njihanja kuta optereenja biti e za tu frekvenciju od 4.036 Hz, 1.4 puta vea od amplitude izmjeninog momenta na osovini ako se kut prikae u radijanima, a moment u jedininim vrijednostima. Za f = 0 Hz dobivamo pojaanje koje odgovara porastu kuta optereenja za step porast momenta na osovini. Reciprona vrijednost pojaanja za frekvenciju 0 Hz odgovara sinkronizacijskom koeficijentu momenta za nazivnu radnu toku koji je izraunat iz statike momentne karakteristike:
G ( j0) =
1 1 = = 0,7771 k s 1,2868
(3.69)
U poglavlju 3.4 dobivene su slijedee vrijednosti frekvencija i priguenja za nazivnu radnu toku:
f vl = 4,1706 Hz f vlpr = 4,1133 Hz
(3.70) (3.71) (3.72)
= 0,1651
39
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Vidi se kako je rezonantna frekvencija neto manja od frekvencije vlastitih nepriguenih oscilacija. Za titrajni sustav drugog reda vrijedi [L3], [L9]:
f rez = f vl 1 2 2
za nazivnu radnu toku dobivamo:
(3.73)
f rez = f vl 1 2 2 = 4,1706 1 2 0,16512 = 4,0553 Hz
(3.74)
to se vrlo dobro slae s rezonantnom frekvencijom oitanom sa frekvencijske karakteristike. Osim frekvencijske karakteristike amplitudnog pojaanja, iz prijenosne karakteristike mogue je dobiti i frekvencijsku karakteristiku faznog pomaka. Ona prikazuje fazni pomak izlazne veliine prema ulaznoj veliini u ovisnosti o frekvenciji ulazne veliine u nekoj radnoj toki. U ovom sluaju izlazna veliina je kut optereenja, a ulazna veliina je moment na osovini. Slika 3.13 prikazuje faznu frekvencijsku karakteristiku prijenosne funkcije (p) / mt (p) za nazivnu radnu toku.
0
-30
-60 fazni pomak []
-90
-120
-150
-180 0
5 f [Hz]
10
Slika 3.13 Fazna karakteristika sinkronog generatora za nazivnu radnu toku
Zanimljivo je uoiti kako za rezonantnu frekvenciju fazni pomak iznosi -90. Kao to je reeno na poetku poglavlja, iz frekvencijske karakteristike mogue je odrediti ne samo vlastitu i rezonantnu frekvenciju ve i vidjeti kolika su pojaanja amplituda kuta optereenja pri izmjeninom momentu odreene frekvencije. U ovom sluaju zanimat e nas kolika su pojaanja, odnosno osjetljivost generatora na izmjenini moment frekvencije 2,083 Hz koja je jednaka frekvenciji vrtnje agregata. Na slici 3.14 prikazana je ovisnost pojaanja amplitude njihanja kuta optereenja pri nekom stacionarnom kutu optereenja uz izmjenini moment na osovini frekvencije 2,083 Hz i pri konstantnom iznosu uzbudne struje. 40
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1.4 1.3 1.2 1.1 |G (j2 2.083)| 1 0.9 0.8 if=1.5 p.u. 0.7 0.6 0.5 0.4 0 if=2 p.u. if=2.5 p.u. 10 20 30 40 50 60 70 if=1 p.u. if=0.5 p.u.
[]
Slika 3.14 Ovisnost pojaanja kuta optereenja o kutu optereenja (radnoj toki) pri frekvenciji izmjeninog momenta od 2,083 Hz i konstantnu uzbudnu struju
Vidljivo je kako je agregat osjetljiviji (vee su amplitude njihanja kuta optereenja) pri manjim uzbudnim strujama. Fazna karakteristika moe nam dati uvid koliko je frekvencija od 2,083 Hz bliska rezonantnoj frekvenciji agregata u nekoj radnoj toki. Na slici 3.15 prikazana je ovisnost faznog pomaka kuta optereenja prema momentu na osovini kod nekog kuta optereenja (radne toke) pri izmjeninom momentu na osovini frekvencije 2,083 Hz i uz konstantnu uzbudnu struju. Kao to se moglo oekivati, agregat je blie rezonantnoj frekvenciji pri manjim strujama uzbude.
-15 if=2.5 p.u. -20 if=2 p.u. -25 -30 fazni pomak [] -35 -40 -45 -50 -55 -60 0 if=0.5 p.u. 10 20 30 40 50 60 70 if=1 p.u. if=1.5 p.u.
[]
Slika 3.15. Ovisnost faznog pomaka kuta optereenja prema momentu na osovini o kutu optereenja (radnoj toki) pri frekvenciji izmjeninog momenta od 2,083 Hz i konstantnu uzbudnu struju
41
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
Na slikama 3.16 i 3.17 prikazane su amplitudne, odnosno fazne frekvencijske karakteristike prijenosne funkcije (p) / mt (p) u nazivnoj radnoj toki. Vidi se kako je pojaanje amplituda kuta optereenja znatno vee kod modela bez prigunog namota, a fazna frekvencijska karakteristika okomitija.
30 model s prigunim namotom model bez prigunog namota 25
20 |G (jw)|
15
10
0 0
5 f [Hz]
10
Slika 3.16 Usporedba amplitudnih frekvencijskih karakteristika dobivenih modelima sa i bez prigunog namota.
0 model s prigunim namotom model bez prigunog namota -30
-60 fazni pomak []
-90
-120
-150
-180 0
5 f [Hz]
10
Slika 3.17 Usporedba faznih frekvencijskih karakteristika dobivenih modelima sa i bez prigunog namota.
42
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
4. Eksperimentalni rezultati mjerenja u HE Dubrava
Mjerenja u HE Dubrava vrena su u razdoblju od 6. do 9. rujna 2004. godine. Izvreno je 122 mjerenja stacionarnih i prijelaznih pojava. Pri svakom mjerenju mjereno je 16 signala: radna snaga 3 fazna napona statora i 3 struje napon prve faze posebnom visokonaponskom sondom (Tektronix) struja prve faze preko mjerenja pada napona na sabirnici uzbudna struja i uzbudni napon uzbudnika polje u zranom rasporu irina zranog raspora brzina vrtnje sinkronizacijski impuls jalova snaga Za sve signale, osim za mjerenje napona Tektronix sondom i struje preko pada napona na sabirnici, koriteni su ve ugraeni davai. Zbog nedostatka signala struje i napona uzbude generatora mjereni su signali struje i napona uzbude uzbudnika. Stacionarna stanja pri kojima su obavljena mjerenja:
Radna snaga od 10 do 40 MW u koracima od po priblino 5 MW Jalova snaga od maksimalne kapacitivne do maksimalne induktivne za gore navedene radne snage u koracima od 5 MVAr
Prijelazne pojave pri kojima su obavljena snimanja na oba agregata:
sinkronizacija generatora na mreu jednopolni isklop i automatski ponovni uklop jednog voda rastereenje generatora zaustavljanje agregata Signali su snimani u trajanju od oko 30 sekundi za svaku radnu toku ili u punom trajanju ukoliko se radilo o rastereivanju s pune radne snage. Frekvencija uzorkovanja za sva mjerenja bila je 10 000 kHz.
43
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
4.1. Mjerenja u stacionarnom stanju
4.1.1. Agregat A
U tablici 4.1 prikazane su vrijednosti napona statora, armaturne struje, radne i jalove snage u jedininim vrijednostima, uzbudne struje uzbudnika u amperima, dvostruka vrijednost amplitude oscilirajue radne nage P u jedininim vrijednostima te mjereni kut optereenja u stupnjevima (elektrinim).
Tablica 4.1 Mjerene vrijednosti stacionarnih radnih toaka Agregata A
Snimak 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 50 51 52 us0(p.u) 1,009 1,038 1,049 1,068 1,092 1,082 1,065 1,045 1,019 1,004 0,995 1,017 1,042 1,061 1,079 1,102 1,109 1,082 1,063 1,039 1,018 0,991 0,987 1,018 1,038 1,060 1,079 1,113 1,117 1,080 1,059 1,038 1,015 0,992 0,979 0,973 0,991 1,015 1,035 1,056 1,075 1,118 is0 (p.u.) 0,930 0,922 0,938 0,959 0,888 0,861 0,828 0,816 0,827 0,849 0,755 0,725 0,720 0,734 0,774 0,839 0,765 0,674 0,631 0,603 0,601 0,639 0,535 0,485 0,491 0,525 0,577 0,720 0,675 0,502 0,427 0,377 0,364 0,398 0,435 0,356 0,285 0,247 0,269 0,337 0,428 0,654 P0(p.u.) 0,930 0,936 0,933 0,938 0,840 0,841 0,833 0,833 0,836 0,839 0,733 0,731 0,729 0,724 0,727 0,730 0,602 0,608 0,610 0,608 0,607 0,607 0,488 0,489 0,488 0,485 0,480 0,481 0,360 0,368 0,369 0,370 0,366 0,365 0,364 0,249 0,246 0,248 0,241 0,241 0,242 0,240 Q0(p.u.) -0,125 0,201 0,296 0,414 0,486 0,401 0,290 0,186 -0,032 -0,154 -0,165 -0,028 0,176 0,287 0,410 0,568 0,599 0,402 0,279 0,151 -0,082 -0,183 -0,203 -0,019 0,147 0,273 0,397 0,642 0,663 0,398 0,261 0,128 -0,051 -0,150 -0,220 -0,241 -0,139 0,040 0,140 0,262 0,391 0,690 Iff (A) 48,1 55,8 59,7 65,4 67,8 62,6 56,5 51,9 45,8 42,8 37,9 42,3 48,3 53,9 60,2 70,4 70 57,7 50,9 43,5 38,1 32,9 29,8 35,6 40,5 47,7 54,3 70,3 70,1 52,5 44,6 38,5 32,2 26,1 23,1 19,3 24,1 30,7 36,6 43 50,3 70 P0(p.u.) 0,022 0,009 0,009 0,011 0,008 0,008 0,006 0,007 0,006 0,008 0,004 0,003 0,003 0,003 0,002 0,002 0,002 0,001 0,002 0,002 0,002 0,002 0,001 0,001 0,003 0,002 0,001 0,002 0,001 0,001 0,001 0,001 0,002 0,001 0,002 0,002 0,001 0,002 0,001 0,001 0,001 0,002 () 36,3 29,5 27,0 24,1 19,9 21,6 24,2 27,5 32,2 36,9 35,2 29,9 25,2 22,1 19,5 16,6 13,8 16,7 19,1 23,1 26,4 32,5 29,1 22,5 19,4 16,3 14,1 11,2 8,9 11,5 13,4 15,8 18,9 22,3 24,9 19,6 16,9 13,8 11,7 9,9 8,9 6,8
44
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1 0.9 0.8 0.7 0.6 P(p.u.) 0.5 0.4 0.3 0.2 0.1 0 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 Q (p.u.) 0.3 0.4 0.5 0.6
Slika 4.1. Mjerene statike radne toke na Agregatu A
Sve mjerene statike radne toke oznaene su na slici 4.1. Iz slike se moe uoiti kako su postignuti koraci radne snage od po 5 MW (0.12 p.u.), ali koraci jalove snage nisu tako pravilni. Razlog tomu je nemogunost preciznog podeavanja jalove snage preko uzbudne struje uzbudnika za razliku od podeavanja radne snage na turbini.
0.94 0.935 0.93 0.925 P [p.u.] 0.92 0.915 0.91 0.905 0.9 0
0.5
1.5
2 t [s]
2.5
3.5
Slika 4.2. Osciliranje radne snage u radnoj toki P = 0,930, Q = -0,125, snimak 010
Slika 4.2 prikazuje osciliranje radne snage kod radne toke u kojoj su amplitude oscilacija najvee. Frekvencija osciliranja radne snage je jednaka frekvenciji vrtnje 2,08 Hz.
45
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
4.1.2. Agregat B
U tablici 4.2 prikazane su vrijednosti napona statora, armaturne struje, radne i jalove snage u jedininim vrijednostima, uzbudne struje uzbudnika u amperima, dvostruka vrijednost amplitude oscilirajue radne nage P u jedininim vrijednostima te mjereni kut optereenja u stupnjevima (elektrinim).
Tablica 4.2 Mjerene vrijednosti stacionarnih radnih toaka Agregata B
Snimak 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 us0(p.u) 0,955 0,979 1,002 1,024 1,040 1,059 1,079 1,115 1,114 1,092 1,076 1,057 1,039 1,021 1,004 0,981 0,985 1,002 1,022 1,044 1,061 1,080 1,099 1,117 1,113 1,099 1,081 1,063 1,044 1,023 0,993 0,997 1,021 1,042 1,061 1,080 1,099 1,097 1,082 1,064 1,044 1,022 1,002 1,007 1,020 1,040 1,059 1,085 is0 (p.u.) 0,366 0,279 0,240 0,272 0,336 0,410 0,489 0,636 0,663 0,557 0,492 0,419 0,373 0,362 0,383 0,444 0,542 0,494 0,476 0,489 0,516 0,563 0,625 0,699 0,755 0,705 0,654 0,621 0,601 0,600 0,645 0,757 0,715 0,714 0,727 0,755 0,803 0,893 0,859 0,832 0,823 0,833 0,862 0,978 0,948 0,941 0,948 0,972 P0(p.u.) 0,247 0,240 0,238 0,243 0,241 0,247 0,239 0,236 0,352 0,361 0,365 0,362 0,365 0,366 0,366 0,364 0,488 0,478 0,483 0,487 0,484 0,482 0,479 0,477 0,606 0,606 0,605 0,608 0,609 0,609 0,610 0,734 0,724 0,726 0,726 0,724 0,726 0,848 0,846 0,843 0,843 0,844 0,849 0,974 0,959 0,963 0,966 0,965 Q0(p.u.) -0,248 -0,130 0,011 0,136 0,253 0,357 0,470 0,668 0,649 0,489 0,384 0,255 0,130 -0,015 -0,116 -0,239 -0,216 -0,131 -0,020 0,152 0,256 0,372 0,493 0,618 0,582 0,483 0,368 0,256 0,148 -0,025 -0,197 -0,176 -0,030 0,160 0,259 0,376 0,501 0,493 0,386 0,272 0,168 0,038 -0,160 -0,148 -0,040 0,175 0,274 0,425 Iff (A) 19,3 24,8 30,7 37,1 42,2 48,8 53,2 69,8 69,8 58,6 52,6 45 38,9 33,5 28,9 23,6 28,4 31,5 36,3 42,9 47,6 53,7 61,6 69,9 70,1 63,3 56,4 50,2 44,5 39,5 33 38,3 43,2 48 53,2 59,8 67,3 70,3 63,5 57,1 52 47,7 43,3 49,4 51,7 56 61,6 70 P0(p.u) 0,002 0,001 0,001 0,001 0,001 0,001 0,002 0,001 0,001 0,001 0,001 0,001 0,001 0,001 0,001 0,001 0,003 0,002 0,003 0,003 0,003 0,003 0,002 0,002 0,004 0,003 0,003 0,003 0,003 0,003 0,004 0,006 0,005 0,005 0,005 0,006 0,006 0,009 0,009 0,009 0,009 0,010 0,011 0,015 0,012 0,011 0,010 0,010 () 23,8 16,6 14,8 10,9 8,9 6,2 6,4 1,4 6,8 9,2 10,9 13,5 16,9 20,4 24,2 29,4 34,7 30,2 26,1 21,4 18,5 16,3 13,2 10,6 15,1 16,8 19,6 22,6 26,6 31,1 39,4 42,4 36,6 30,7 26,6 22,5 20,3 23,4 26,5 30,5 34,5 39,4 44,8 44,8 43,0 37,9 33,3 28,3
46
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1 0.9 0.8 0.7 0.6 P [p.u.] 0.5 0.4 0.3 0.2 0.1 0 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 Q [p.u.] 0.3 0.4 0.5 0.6
Slika 4.3. Mjerene statike radne toke na Agregatu B
Sve mjerene statike radne toke oznaene su na slici 4.3. Iz slike se moe uoiti kako su postignuti koraci radne snage od po 5 MW (0.12 p.u.), ali koraci jalove snage nisu tako pravilni. Razlog tomu je nemogunost preciznog podeavanja jalove snage preko uzbudne struje uzbudnika za razliku od podeavanja radne snage na turbini.
0.98
0.975 P [p.u.]
0.97
0.965
0.96
0.955 0
0.5
1.5
2 t [s]
2.5
3.5
Slika 4.4. Osciliranje radne snage u radnoj toki P = 0,975, Q = -0,149, snimak 0116
Slika 4.4 prikazuje osciliranje radne snage kod radne toke u kojoj su amplitude oscilacija najvee. Frekvencija osciliranja radne snage je jednaka frekvenciji vrtnje 2,08 Hz.
47
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
4.2. Mjerenja prijelaznih pojava
4.2.1. Agregat A
U prijelaznim stanjima na agregatu A izvrena su slijedea mjerenja: Jednopolni isklop i automatski ponovni uklop (APU) pri slijedeim radnim tokama: Snimak 05 P0 = 0,905 p.u., Q0 = -0,119 p.u., krae trajanje isklopa Snimak 06 P0 = 0,905 p.u., Q0 = -0,119 p.u., dulje trajanje isklopa Snimak 07 P0 = 0,905 p.u., Q0 = 0,381 p.u. Snimak 08 P0 = 0,374 p.u., Q0 = -0,190 p.u. Snimak 09 P0 = 0,357 p.u., Q0 = 0,643 p.u. Sinkronizacija, Snimak 057 Isklop s mree pri radnim tokama: Snimak 02 P0 = 0,898 p.u., Q0 = 0 p.u Snimak 058 P0 = 0,250 p.u., Q0 = 0 p.u. Rastereenje runim postupkom pri P0 = 0,905 p.u. i Q0 = 0,238 p.u. Na slikama 4.5 do 4.9 prikazane su radne snage za vrijeme trajanja APU-a.
1 0.98 0.96 0.94 0.92 P [p.u.] 0.9 0.88 0.86 0.84 0.82 0.8 2 2.5 3 3.5 4 4.5 t [s] 5 5.5 6 6.5 7
Slika 4.5. Radna snaga kod APU-a, snimak 05
P0 = 0,905 p.u., Q0 = -0,119 p.u
48
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1.05
0.95 P [p.u.] 0.9 0.85 0.8 1
4 t [s]
Slika 4.6 Radna snaga kod APU-a, snimak 06
P0 = 0,905 p.u., Q0 = -0,119 p.u
1 0.98 0.96 0.94 0.92 P [s] 0.9 0.88 0.86 0.84 0.82 0.8 1 2 3 4 t [s] 5 6 7
Slika 4.7 Radna snaga kod APU-a, snimak 07
P0 = 0,357 p.u., Q0 =0,643 p.u
Na slikama 4.5 do 4.7 radna snaga je blizu nominalne i amplitude oscilacija su vee, kako za vrijeme APU-a tako i prije i nakon APU-a. Vidljive su i promjene frekvencije osciliranja za vrijeme APU-a to pokazuje da se vlastita frekvencija agregata promijenila jer u tim trenucima agregat, odnosno radna snaga, oscilira frekvencijom koja je jednaka vlastitoj frekvenciji priguenih oscilacija. Na slikama 4.8. i 4.9 te pojave su slabije izraene jer je radna snaga manja.
49
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
0.42
0.4
0.38 P [p.u.]
0.36
0.34
0.32
0.3 2
2.5
3.5
4.5 t [s]
5.5
6.5
Slika 4.8 Radna snaga kod APU-a, snimak 08
P0 = 0,374 p.u., Q0 =-0,190 p.u
0.4 0.39 0.38 0.37 0.36 P [p.u.] 0.35 0.34 0.33 0.32 0.31 1.5 2 2.5 3 3.5 4 t [s] 4.5 5 5.5 6 6.5
Slika 4.9 Radna snaga kod APU-a, snimak 09
P0 = 0,374 p.u., Q0 =0,643 p.u
Na slici 4.10 prikazana je promjena radne snage tijekom runog rastereenja. Agregat je prije rastereenja radio u radnoj P0 = 0,905 p.u., Q0 = 0,238 p.u. Na snimci je vidljivo kako amplitude oscilacija radne snage opadaju sa opadanjem radne snage. Prijelazna stanja tijekom iskljuivanja generatora s mree obraena su u poglavlju 4.3. jer su vezana za odreivanje momenta inercije agregata.
50
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1 0.95 0.9 0.85 P [p.u.] 0.8 0.75 0.7 0.65
10
20
30
40 t [s]
50
60
70
80
90
Slika 4.10 Rastereenje u radnoj toki, P0 = 0,905 p.u. i Q0 = 0,238 p.u snimak 053
4.2.2. Agregat B
U prijelaznim stanjima na agregatu B izvrena su slijedea mjerenja: Jednopolni isklop i automatski ponovni uklop (APU) pri slijedeim radnim tokama: Snimak 066 P0 = 0,905 p.u., Q0 = -0,071 p.u., krae trajanje isklopa Snimak 067 P0 = 0,905 p.u., Q0 = 0,429 p.u., dulje trajanje isklopa Snimak 068 P0 = 0,643 p.u., Q0 = 0,547 p.u. Snimak 069 P0 = 0,643 p.u., Q0 = -0,143 p.u. Snimak 070 P0 = 0,357 p.u., Q0 = -0,213 p.u. Snimak 070 P0 = 0,357 p.u., Q0 = 0,619 p.u. Sinkronizacija, Snimak 122 Isklop s mree pri radnim tokama: Snimak 062 P0 = 0,238 p.u., Q0 = 0 p.u Snimak 063 P0 = 0,898 p.u., Q0 = 0 p.u. Rastereenje runim postupkom pri P0 = 0,905 p.u. i Q0 = 0,238 p.u Na slikama 4.11 do 4.16 prikazane su radne snage za vrijeme trajanja APU-a.
51
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1 0.98 0.96 0.94 P [p.u.] 0.92 0.9 0.88 0.86 0.84 0.82 1.5
2.5
3.5
4 t [s]
4.5
5.5
6.5
Slika 4.11 Radna snaga kod APU-a, snimak 066
P0 = 0,905 p.u., Q0 = -0,071 p.u
1 0.98 0.96 0.94 0.92 P [p.u.] 0.9 0.88 0.86 0.84 0.82 0.8 2 2.5 3 3.5 4 4.5 t [s] 5 5.5 6 6.5 7
Slika 4.12 Radna snaga kod APU-a, snimak 067
P0 = 0,905 p.u., Q0 = 0,429 p.u
Na slikama 4.11 i 4.12 radna snaga je blizu nominalne i amplitude oscilacija su vee, kako za vrijeme APU-a tako i prije i nakon APU-a. Vidljive su i promjene frekvencije osciliranja za vrijeme APU-a to pokazuje da se vlastita frekvencija agregata promijenila jer u tim trenucima agregat, odnosno radna snaga, oscilira frekvencijom koja je jednaka vlastitoj frekvenciji priguenih oscilacija. Na slikama 4.13 i 4.14 te pojave su neto slabije izraene, ali jo uvijek uoljive. Na slikama 4.15 i 4.16 radna snaga je neto via od treine nazivne snage i ta pojava vie nije izraena.
52
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
0.74
0.72
0.7
P [p.u.]
0.68
0.66
0.64
0.62
0.6 0.5
1.5
2.5
3 t [s]
3.5
4.5
5.5
Slika 4.13 Radna snaga kod APU-a, snimak 068
P0 = 0,671 p.u., Q0 = 0,547 p.u
0.75
0.7
P [p.u.]
0.65
0.6
0.55 0
0.5
1.5
2.5 t [s]
3.5
4.5
Slika 4.14 Radna snaga kod APU-a, snimak 069
P0 = 0,671 p.u., Q0 = -0,143 p.u
53
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
0.44
0.42
0.4 P [p.u.]
0.38
0.36
0.34
0.32 0
0.5
1.5 t [s]
2.5
Slika 4.15 Radna snaga kod APU-a, snimak 070
P0 = 0,357 p.u., Q0 = -0,213 p.u
0.44
0.42
0.4 P [p.u.]
0.38
0.36
0.34
0.32 0
0.5
1.5
2 t [s]
2.5
3.5
Slika 4.16 Radna snaga kod APU-a, snimak 071
P0 = 0,357 p.u., Q0 = 0,619 p.u
Na slici 4.17 prikazana je promjena radne snage tijekom runog rastereenja. Agregat je prije rastereenja radio u radnoj P0 = 0,958 p.u., Q0 = 0,447 p.u. Na snimci je vidljivo kako amplitude oscilacija radne snage opadaju s opadanjem radne snage. Prijelazna stanja tijekom iskljuivanja generatora s mree obraena su u poglavlju 4.3. jer su vezana za odreivanje momenta inercije agregata.
54
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
0.95
0.9
P [p.u.]
0.85
0.8
0.75
0.7
0.65 0
10
15
20 t [s]
25
30
35
40
Slika 4.17 Rastereenje u radnoj toki, P0 = 0,958 p.u. i Q0 = 0,447 p.u snimak 0121
4.3. Utjecaj radne toke agregata na iznos mehanike vremenske konstante
Prema podacima proizvoaa momenti tromosti za oba generatora su jednaki, pa se pretpostavlja kako to vrijedi i za turbine. Budui da moment tromosti izravno utjee na iznos vlastite frekvencije ovdje e se prikazati kako je mjerenjem odreena stvarna vrijednost momenta tromosti za svaki od agregata pojedinano. Iz dobivenih momenata tromosti mogu se izraunati mehanike vremenske konstante. Pretpostavljalo se, a mjerenja su to i pokazala, kako je utjecaj vode na zamane mase agregata znaajan. Prema ranije obavljenim mjerenjima tvrtke Litostroj ukupan moment inercije rotirajuih masa kod snage 38 MW je oko 500 tm2, a u praznom hodu oko 400 tm2. to je pokazatelj kako je utjecaj vode na ukupni moment inercije agregata znaajan. Kako bi se tonije odredio udio zamanih masa vode na ukupan moment inercije agregata provedena su mjerenja kod ispada agregata s pune snage i sa snage 10 MW za oba agregata
4.3.1. Agregat A
Odreivanje ukupnog momenta tromosti agregata A nainjeno za dva iskljuenja s mree pri razliitim optereenjima; P1=37,8 MW i P2=10,5 MW uz cos 1. Na slici 4.18 prikazane su kutna brzina i kutna akceleracija agregata pri rastereenju generatora prethodno optereenog s P1=37,8 MW. Kutna akceleracija agregata odreena je iz derivacija kutne brzine agregata. U trenutku rastereenja dobije se kutna akceleracija
55
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1 =
rad m1 n1 = = 58,4 = 6,12 t1 t1 30 30 s
(4.1)
Sada se moe izraunati i moment inercije koji ukljuuje doprinos vode pri snazi P1=37,8 MW:
30 P 30 37,8 106 m1 1 J A1 = = = = = 472,2 tm 2 1 1 n 1 125 6,12
P 1
M1
(4.2)
Isti se postupak moe provesti i za rastereenje agregata sa snage P2=10,5 MW. Na slici 4.19 prikazane su kutna brzina i kutna akceleracija agregata pri rastereenju generatora prethodno optereenog s P2=10,5 MW.
2 =
rad m 2 n2 = = 20,7 = 2,17 t2 t2 30 30 s 30 P2 30 10,5 106 m 2 = = = 369.4 tm 2 2 n 2 125 2,17
(4.3)
P2
J A2 =
M2
(4.4)
200 n [r/min] 180 160 140 120
[r/min/s]
kutna brzina kutna akceleracija
100 80 60 40 20 0 -20 0 5 10 15 t [s] 20 25 30 35
Slika 4.18. Brzina vrtnje i akceleracija pri rastereenju agregata A prethodno optereenog snagom P1 = 37,8 MW
56
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
200 180 n [r/min] 160 140 120
[r/min/s]
kutna brzina kutna akceleracija
100 80 60 40 20 0 -20 0 5 10 15 t [s] 20 25 30 35
Slika 4.19. Brzina vrtnje i akceleracija pri rastereenju agregata A prethodno optereenog snagom P2 = 10,5 MW
Prema podacima iz dokumentacije moment inercije generatora iznosi 287,5 tm2, a moment turbine iznosi 45 tm2. Za ostale radne snage moe se uvesti linearna ekstrapolacija prema kojoj se moe izraunati ukupan moment inercije agregata s ukljuenim utjecajem vode:
J A ( P) = 329,9 + 3,77 P(MW ) tm 2
(4.5)
Za P=0 dobivamo vrijednost za ukupni moment inercije 329,9 tm2, to se dobro slae sa ukupnim momentom inercije agregata 287,5 + 45 = 332,5 tm2. Sada se i mehanika vremenska konstanta agregata moe izraziti u ovisnosti o radnoj snazi:
TmA ( P ) =
2 (314,15) = 1,346 + 0,0154 P(MW ) J A B = (329,9 + 3,77 P (MW ) ) 2 2 p SB 24 42 106 2
(4.6)
TmA = 1,346 + 0,648 P(p.u.)
Slika 4.20 pokazuje usporedbu vlastitih frekvencija agregata uz konstantnu mehaniku vremensku konstantu i kada se mehanika vremenska konstanta mijenja u ovisnosti o radnoj snazi. Jalova radna snaga je konstantna. Vlastite frekvencije raunate su modelom s prigunim namotom.
57
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
4 Tm=1,346 s, Q=0,5 p.u. Tm=1,346 s, Q=0 p.u. Tm=1,346 s, Q=-0,5 p.u. Tm=f(P), Q=0.5 p.u. Tm=f(P), Q=0 p.u. Tm=f(P), Q=-0,5 p.u.
3.8
3.6
f [Hz]
3.4
3.2
2.8
2.6 0
0.1
0.2
0.3
0.4
0.5 P [p.u.]
0.6
0.7
0.8
0.9
Slika 4.20 Usporedba vlastitih frekvencije agregata sa i bez uzimanja u obzir ovisnosti mehanike vremenske konstante o radnoj snazi
Na slici 4.20 se vidi kako se zbog utjecaja radne snage (vode) na ukupni moment inercije agregata vlastita frekvencija agregata smanjuje uz poveanje radne i smanjivanje jalove snage. Time se vlastita frekvencija agregata pribliava frekvenciji vrtnje 2,083 Hz.
4.3.2. Agregat B
Odreivanje ukupnog momenta tromosti agregata A nainjeno za dva iskljuenja s mree pri razliitim optereenjima; P1=37,6 MW i P2=10,1 MW uz cos 1. Na slici 4.21 prikazane su kutna brzina i kutna akceleracija agregata pri rastereenju generatora prethodno optereenog s P1=37.6 MW. Kutna akceleracija agregata odreena je iz derivacija kutne brzine agregata. U trenutku rastereenja dobije se kutna akceleracija
1 =
rad m1 n1 = 58,9 = 6,17 = 30 s t1 30 t1
(4.7)
Sada se moe izraunati i moment inercije koji ukljuuje doprinos vode pri snazi P1=37,6 MW:
J B1 =
M1
30 P 30 37,6 106 m1 1 = = = 465,6 tm 2 1 n 1 125 6,17
P 1
(4,8)
Isti se postupak moe provesti i za rastereenje agregata sa snage P2=10,1 MW. Na slici 4.22 prikazane su kutna brzina i kutna akceleracija agregata pri rastereenju generatora prethodno optereenog s P2=10,1 MW. 58
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
2 =
rad m 2 n2 = = 20,1 = 2,10 t2 t2 30 30 s 30 P2 30 10,1 106 m 2 = = = 367,8 tm 2 2 n 2 125 2,10
(4.9)
P2
J B2 =
M2
(4.10)
Prema podacima moment inercije generatora iznosi J = 287,5 tm2 , moment turbine iznosi 45 tm2. Za ostale radne snage moe se uvesti linearna ekstrapolacija prema kojoj se moe izraunati ukupan moment inercije agregata s ukljuenim utjecajem vode:
J B ( P) = 331,9 + 3,56 P(MW ) tm 2
(4.11)
Za P=0 dobivamo vrijednost za ukupni moment inercije 331,9 tm2, to se dobro slae sa ukupnim momentom inercije agregata 287,5 + 45 = 332,5 tm2. Sada se i mehanika vremenska konstanta agregata moe izraziti u ovisnosti o radnoj snazi:
(314,15) = 1,354 + 0,0145 P(MW ) J 2 TmB ( P) = B B = (331,9 + 3,56 P(MW ) ) 2 2 p SB 24 42 106
2
(4.12)
TmB = 1,354 + 0,609 P(p.u.)
200 n [r/min]
kutna brzina kutna akceleracija
150
[r/min/s]
100
50
10
15 t [s]
20
25
30
35
Slika 4.21. Brzina vrtnje i akceleracija pri rastereenju agregata B prethodno optereenog snagom P1 = 37,6 MW
59
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
160 n [r/min] 140 120 100 80 60 40 20 0 -20 0 kutna brzina kutna akceleracija
[r/min/s]
10
15 t [s]
20
25
30
35
Slika 4.22. Brzina vrtnje i akceleracija pri rastereenju agregata B prethodno optereenog snagom P2 = 10,1 MW
Slika 4.23 pokazuje usporedbu vlastitih frekvencija agregata uz konstantnu mehaniku vremensku konstantu i kada se mehanika vremenska konstanta mijenja u ovisnosti o radnoj snazi. Jalova radna snaga je konstantna. Vlastite frekvencije raunate su modelom s prigunim namotom. Na slici se vidi kako se zbog utjecaja radne snage (vode) na ukupni moment inercije agregata vlastita frekvencija agregata smanjuje uz poveanje radne i smanjivanje jalove snage. Time se vlastita frekvencija agregata pribliava frekvenciji vrtnje 2,083 Hz.
4 Tm=1,354 Q=0,5 p.u. Tm=1,354 s, Q=0 p.u. Tm=1,354 s, Q=-0,5 p.u. Tm=f(P), Q=0.5 p.u. Tm=f(P), Q=0 p.u. Tm=f(P), Q=-0,5 p.u.
3.8
3.6
3.4 f [Hz] 3.2 3 2.8 2.6 0
0.1
0.2
0.3
0.4
0.5 P [p.u.]
0.6
0.7
0.8
0.9
Slika 4.23 Usporedba vlastitih frekvencije agregata sa i bez uzimanja u obzir ovisnosti mehanike vremenske konstante o radnoj snazi
60
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
4.4. Podaci ispitivanih agregata
Podaci generatora: Proizvoa: RADE KONAR Tip: S 5049-48, Tv. broj: 14426 (Generator A)
S n = 42 MVA
U n = 6,3 kV 7,5% I n = 3849 A 7,5% cos n = 0,95 nn = 125 min 1
Tv. broj: 14424 (Generator B)
n p = 360 min 1
f n = 50 Hz
Uzbuda generatora A:
I fn = 920 A U fuzb = 78 V I fuzb = 74 A I fuzb 0 = 29 A I fuzbK = 39,29 A
Uzbuda generatora B:
I fn = 1090 A U fuzb = 69 V I fuzb = 73 A I fuzb 0 = 31,4 A I fuzbK = 39,72 A
Parametri generatora A i B:
Z B = 0,945 rs = 0,006023 (26o C ), rs 75 = 0,00724 = 0,00766 p.u. rf = 0,1715 (22o C ), rf 75 = 0,207 Ld = 0,1346 p.u.
Lq = 0,94 p.u.
61
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
L'd = 0,446 p.u.
' L'd = 0,33 p.u.
L = 0,243 p.u. L0 = 0,293 p.u.
Td' 0 = 1,66 s Td' = 0,55 s Td'' = 0,029 s Tm = 1,173 s J = 187,5 tm 2
Podaci transformatora: Proizvoa: RADE KONAR Tip: 1TON 43000-123, Tv. broj: 307034 (Transformator A) Tv. broj: 307033 (Transformator B)
S n = 43 MVA UVNn / U NNn = 115 kV / 6,3 kV
Spoj YN,d5
u k = 11,49% (Transformator A) u k = 11,38% (Transformator B)
Podaci turbine: Horizontalna Kaplan turbina s 4 lopatice
J = 45 tm 2
Ostali parametri generatora potrebni za matematiki model Iz nazivnih podataka i parametara generatora izraunati su parametri generatora potrebni za matematiki model generatora [L1], [L2], [L4]. Budui da nije poznat poetni induktivitet u q osi, a ni poetna vremenska konstanta u q osi, parametri prigunog namota u q osi izraunati su uz pretpostavku da su otpori prigunih namota u d i q osi jednaki, te da su rasipni induktiviteti prigunih namota u d i q osi jednaki:
62
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
rQ = rD LQ = LD
Parametri potrebni za matematiki model izraunati su prema relacijama [L4]:
(4.13) (4.14)
Lad = Ld L = 1,103 p.u.
Lf = L2 ad Ld L'd = 1,352 p.u.
(4.15)
(4.16)
Lf = L f Lad = 0,249 p.u.
(4.17) (4.18)
rf =
Lf
B Td' 0
= 0,0026 p.u.
LD
(L =
' d
' L L'd L
)(
L L
' d
'' d
) = 0,152
p.u.
(4.19)
LD = LD + Lad = 1,256 p.u. T =
'' d0
(4.20) (4.21)
Ld Td' Td''
' L'd Td' 0
= 0,0392 s
1 = 0,0289 p.u. B Td''0
Lad Lf rD = LsD + Lf
(4.22)
Laq = Lq L = 0,697 p.u. LQ = LQ + Laq = 0,849 p.u.
' L'q = L +
(4.23) (4.24) (4.25)
Laq LQ LQ
= 0,368 p.u.
2
L =
'' Q
' L'q Lq L
Lq
( (L
) = 0,332 L )
'' q
p.u.
(4.26)
63
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
5. Usporedba rezultata prorauna sa rezultatima mjerenja
5.1.1. Agregat A
Tablica5.1 Raunske i mjerene vrijednosti na agregatu A
Snimak 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 50 51 52 () 36,396 29,508 27,042 24,105 19,944 21,697 24,296 27,588 32,292 36,953 35,244 29,902 25,217 22,117 19,590 16,620 13,891 16,794 19,172 23,100 26,475 32,525 29,186 22,558 19,425 16,328 14,176 11,267 8,988 11,551 13,482 15,833 18,932 22,307 24,930 19,697 16,995 13,857 11,745 9,969 8,974 6,846 1() 44,152 34,766 32,607 29,918 25,564 27,061 29,080 31,679 40,025 42,404 39,543 36,073 28,721 25,994 23,809 21,424 17,516 20,257 22,384 25,066 30,734 35,148 30,360 25,280 20,645 18,258 16,345 13,779 10,273 12,658 14,231 16,190 19,311 22,167 24,510 18,025 15,231 12,293 10,661 9,451 8,504 6,796 e0(pu) 1,659 1,924 2,059 2,255 2,338 2,159 1,948 1,790 1,579 1,476 1,307 1,459 1,666 1,859 2,076 2,428 2,414 1,990 1,755 1,500 1,314 1,134 1,028 1,228 1,397 1,645 1,872 2,424 2,417 1,810 1,538 1,328 1,110 0,900 0,797 0,666 0,831 1,059 1,262 1,483 1,734 2,414 Tm(s) 1,949 1,953 1,955 1,954 1,891 1,891 1,886 1,886 1,888 1,890 1,821 1,820 1,819 1,816 1,818 1,820 1,737 1,740 1,742 1,740 1,740 1,739 1,663 1,663 1,662 1,660 1,657 1,658 1,580 1,585 1,585 1,586 1,583 1,583 1,582 1,508 1,506 1,507 1,502 1,503 1,503 1,502 fvl(Hz) 2,117 2,448 2,582 2,766 2,958 2,817 2,636 2,459 2,206 2,021 1,978 2,216 2,465 2,662 2,852 3,124 3,234 2,904 2,699 2,444 2,234 1,958 1,984 2,286 2,481 2,724 2,928 3,348 3,450 2,980 2,743 2,535 2,301 2,053 1,908 1,906 2,115 2,376 2,590 2,803 3,020 3,551 fvl1(Hz) 2,417 2,637 2,709 2,805 2,893 2,822 2,727 2,632 2,459 2,369 2,316 2,439 2,616 2,723 2,836 2,980 3,045 2,855 2,731 2,594 2,380 2,259 2,201 2,417 2,597 2,742 2,876 3,125 3,198 2,915 2,758 2,597 2,382 2,236 2,138 2,085 2,242 2,489 2,635 2,797 2,952 3,286 fvl2(Hz) 2,745 2,782 2,796 2,822 2,900 2,886 2,867 2,841 2,804 2,781 2,820 2,852 2,888 2,917 2,940 2,970 3,050 3,008 2,980 2,948 2,919 2,880 2,939 2,985 3,015 3,049 3,079 3,127 3,208 3,150 3,119 3,087 3,055 3,020 3,000 3,065 3,094 3,132 3,167 3,199 3,227 3,292 fvl3(Hz) 3,572 3,942 4,045 4,188 4,399 4,313 4,194 4,054 3,786 3,611 3,668 3,885 4,131 4,277 4,411 4,576 4,736 4,529 4,389 4,224 3,976 3,773 3,875 4,149 4,340 4,501 4,642 4,887 5,029 4,758 4,607 4,450 4,251 4,086 3,975 4,077 4,226 4,436 4,579 4,727 4,864 5,169
64
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
U tablici 5.1 prikazane su vrijednosti: mjereni kut optereenja
1
e0 Tm f vl
kut optereenja dobiven iz fazorskog dijagrama i mjerene jalove i radne snage prema izrazima (2.92-2.94) dobiven iz mjerene struje uzbude uzbudnika normiranjem prema praznom hodu mehanika vremenska konstanta dobivena prema relaciji (4.6) vlastita frekvencija dobivena iz statike momentne karakteristike agregata, uz koritenje, mjerenog kuta optereenja i mjerenog fiktivnog induciranog napona e0
f vl1 f vl 2 f vl 3
vlastita frekvencija agregata dobivena proraunom prema statikoj momentnoj karakteristici vlastita frekvencija agregata dobivena proraunom iz vlastitih vrijednosti pomou modela bez prigunog namota vlastita frekvencija agregata dobivena proraunom iz vlastitih vrijednosti pomou modela s prigunim namotom
U tablici 5.1 dane su usporedbe vlastitih frekvencija dobivenih izraunom iz dokumentacijskih podataka agregata s vlastitim frekvencijama koje se temelje na mjerenjima izvrenim na agregatu B u HE Dubrava. Vrijednosti vlastitih frekvencija koje su dobivene modelom koji ukljuuje i priguni namot u pravilu su znatno vee od vrijednosti vlastitih frekvencija dobivenih kada se utjecaj prigunog namota zanemaruje. Iz toga se da zakljuiti kako priguni namot ima utjecaj i na iznos vlastite frekvencije a ne samo na faktor priguenja. Naalost, u dokumentaciji nisu pronaeni podaci nuni za odreivanje svih parametara prigunog namota. To se posebno odnosi na parametre prigunog namota u poprenoj osi koji prema izvrenim simulacijama i prema [L2] ima vei utjecaj na iznos vlastite frekvencije
65
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
5.1.2. Agregat B
Tablica 5.2 Raunske i mjerene vrijednosti na agregatu B
Snimak 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 () 23,862 16,662 14,895 10,937 8,954 6,277 6,409 1,461 6,865 9,297 10,974 13,531 16,959 20,433 24,273 29,478 34,775 30,270 26,130 21,451 18,505 16,325 13,292 10,647 15,128 16,809 19,608 22,606 26,606 31,141 39,437 42,500 36,617 30,773 26,688 22,545 20,335 23,439 26,543 30,570 34,520 39,452 44,836 44,820 43,094 37,983 33,396 28,385 1() 18,880 15,153 12,219 11,019 9,749 9,049 7,962 6,782 10,138 11,627 12,727 14,083 15,949 19,062 20,983 24,892 30,896 27,023 24,747 20,390 18,421 16,622 15,077 13,796 17,700 18,904 20,557 22,639 24,977 30,532 35,600 39,804 35,525 28,890 26,514 24,108 22,130 25,530 27,389 29,719 32,415 34,606 43,106 46,307 44,326 35,990 33,344 29,908 e0(p.u.) 0,615 0,790 0,978 1,182 1,344 1,554 1,694 2,223 2,223 1,866 1,675 1,433 1,239 1,067 0,920 0,752 0,904 1,003 1,156 1,366 1,516 1,710 1,962 2,226 2,232 2,016 1,796 1,599 1,417 1,258 1,051 1,220 1,376 1,529 1,694 1,904 2,143 2,239 2,022 1,818 1,656 1,519 1,379 1,573 1,646 1,783 1,962 2,229 Tm(s) 1,504 1,501 1,499 1,503 1,501 1,504 1,500 1,498 1,569 1,574 1,576 1,575 1,577 1,577 1,577 1,576 1,652 1,645 1,648 1,651 1,649 1,648 1,646 1,645 1,724 1,723 1,723 1,725 1,725 1,725 1,726 1,801 1,795 1,797 1,797 1,795 1,797 1,870 1,869 1,867 1,868 1,868 1,871 1,948 1,938 1,941 1,943 1,942 fvl(Hz) 1,775 2,069 2,284 2,516 2,682 2,879 3,016 3,449 3,351 3,064 2,895 2,673 2,464 2,260 2,059 1,793 1,773 1,972 2,191 2,447 2,620 2,809 3,036 3,254 3,133 2,962 2,762 2,561 2,345 2,121 1,745 1,751 2,035 2,290 2,498 2,726 2,928 2,873 2,675 2,454 2,246 2,018 1,762 1,850 1,958 2,191 2,421 2,707 fvl1(Hz) 2,033 2,225 2,432 2,607 2,756 2,888 3,031 3,267 3,192 3,020 2,902 2,754 2,607 2,434 2,299 2,128 2,194 2,297 2,433 2,620 2,739 2,868 2,997 3,124 3,051 2,958 2,843 2,727 2,612 2,443 2,263 2,326 2,455 2,621 2,719 2,832 2,946 2,923 2,832 2,732 2,636 2,524 2,381 2,436 2,501 2,647 2,731 2,855 fvl2(Hz) 3,080 3,122 3,160 3,192 3,219 3,245 3,281 3,337 3,259 3,221 3,196 3,168 3,139 3,112 3,084 3,050 2,986 3,018 3,045 3,075 3,102 3,132 3,161 3,187 3,108 3,089 3,064 3,036 3,008 2,978 2,932 2,876 2,916 2,945 2,971 3,000 3,025 2,962 2,942 2,918 2,890 2,860 2,829 2,780 2,805 2,830 2,855 2,891 fvl3(Hz) 3,995 4,189 4,375 4,531 4,662 4,782 4,922 5,154 5,028 4,862 4,747 4,608 4,468 4,307 4,167 3,977 3,866 4,025 4,186 4,378 4,509 4,646 4,779 4,905 4,756 4,657 4,532 4,397 4,256 4,054 3,780 3,684 3,925 4,146 4,280 4,424 4,556 4,441 4,328 4,194 4,050 3,871 3,608 3,530 3,693 3,935 4,072 4,259
66
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
1
e0 Tm f vl
mjereni kut optereenja kut optereenja dobiven iz fazorskog dijagrama i mjerene jalove i radne snage prema izrazima (2.92-2.94) dobiven iz mjerene struje uzbude uzbudnika normiranjem prema praznom hodu mehanika vremenska konstanta dobivena prema relaciji (4.12) vlastita frekvencija dobivena iz statike momentne karakteristike agregata, uz koritenje, mjerenog kuta optereenja i mjerenog fiktivnog induciranog napona e0
f vl1 f vl 2 f vl 3
vlastita frekvencija agregata dobivena proraunom prema statikoj momentnoj karakteristici vlastita frekvencija agregata dobivena proraunom iz vlastitih vrijednosti pomou modela bez prigunog namota vlastita frekvencija agregata dobivena proraunom iz vlastitih vrijednosti
pomou modela s prigunim namotom U tablici 5.2 dane su usporedbe vlastitih frekvencija dobivenih izraunom iz dokumentacijskih podataka agregata s vlastitim frekvencijama koje se temelje na mjerenjima izvrenim na agregatu B u HE Dubrava. Vrijednosti vlastitih frekvencija koje su dobivene modelom koji ukljuuje i priguni namot u pravilu su znatno vee od vrijednosti vlastitih frekvencija dobivenih kada se utjecaj prigunog namota zanemaruje. Iz toga se da zakljuiti kako priguni namot ima utjecaj i na iznos vlastite frekvencije a ne samo na faktor priguenja. Naalost, u dokumentaciji nisu pronaeni podaci nuni za odreivanje svih parametara prigunog namota. To se posebno odnosi na parametre prigunog namota u poprenoj osi koji prema izvrenim simulacijama i prema [L2] i [L24] ima vei utjecaj na iznos vlastite frekvencije.
67
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
6. Zakljuak
U radu se obrauju naini proraunavanja vlastitih frekvencija sinkronog generatora s istaknutim polovima, odnosno cijevnih agregata. Dane su usporedbe vlastitih frekvencija dobivenih izraunom iz dokumentacijskih podataka agregata s vlastitim frekvencijama koje se temelje na mjerenjima izvrenim na agregatima u HE Dubrava. Vrijednosti vlastitih frekvencija koje su dobivene modelom koji ukljuuje i priguni namot u pravilu su znatno vee od vrijednosti vlastitih frekvencija dobivenih kada se utjecaj prigunog namota zanemaruje to je u skladu s [L2] i [L24]. Iz toga se da zakljuiti kako priguni namot ima utjecaj i na iznos vlastite frekvencije a ne samo na faktor priguenja. Naalost, u dokumentaciji nisu pronaeni podaci nuni za odreivanje svih parametara prigunog namota. To se posebno odnosi na parametre prigunog namota u poprenoj osi koji prema izvrenim simulacijama i prema [L2] ima vei utjecaj na iznos vlastite frekvencije. Iz mjerenja prijelaznih stanja za vrijeme APU-a proizlazi da su iznosi vlastite frekvencije ipak vei nego to se dobivaju izraunavanjem iz statike momentne karakteristike, bilo da se kut optereenja i fiktivni inducirani napon uzimaju iz mjerenja bilo da su izraunati na temelju fazorskog dijagrama. Ne smije se zanemariti niti injenica kako napon na stezaljkama generatora nije krut to znai da treba raunati s kutom optereenja prema krutoj mrei. Da bi se taj utjecaj uzeo u obzir potrebno je poznavati parametre mree. U literaturi se navode neki od naina smanjenja elektromehanikih oscilacija [L18], [L23], [L25]. o dodatnom regulacijom uzbudne struje, o dodatnom turbinskom regulacijom, ali se navodi kako je to najee teko izvedivo zbog velikih vremenskih konstanti, o korekcijom prigunog namota, rekonstrukcija prigunog kaveza zahtijevala bi vrlo paljivo projektiranje novog prigunog namota jer bi agregat mogao doi u nestabilno podruje rada pri induktivnom podruju rada i manjim snagama, o smanjenjem ili poveanjem momenta inercije. Ovakvi zahtjevi su vrlo opseni. Zakljuuje se kako je ipak najbolji nain dodatna regulacija struje uzbude.
68
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
7. Saetak
Elektromehanike oscilacije cijevnih hidroagregata Cijevni hidroagregati su hidroagregati koji se potapaju u protoni trakt hidroelektrane. Ugrauju se u elektranama kod kojih je prirodan pad vode premalen za okomite agregate. Obino su manjih snaga (do 100 MVA) i manjih brzina vrtnje (od 50 do 200 okretaja u minuti). Zbog manjeg ukupnog momenta tromosti, frekvencija vlastitih oscilacija cijevnih agregata, bliska je frekvenciji vrtnje. To moe uzrokovati pojavu rezonancije. Upravo takva pojava uoljiva je kod cijevnih hidroagregata snaga 42 MVA u HE Dubrava. U radu je prikazan nain izraunavanja frekvencije vlastitih oscilacija, rezultati mjerenja u HE Dubrava te dane usporedbe rezultata mjerenja i izvrenih prorauna za oba agregata. Kljune rijei: cijevni hidroagregati, vlastita frekvencija, moment tromosti
Summary
Electromechanical Oscillation of Bulb Type Hydropower units The bulb-type horizontal-shaft hydro generators are enclosed electric machines placed straight in the water flow. They are usually used for power plants with small elevation drops, too small for utilization of vertical hydro generators. Typically, their rated power is up to 100 MVA and rated speed is 50 to 200 rpm. Due to lower inertia their natural frequency is close to rotation frequency, which can cause the resonance. This phenomenon is present in case of 42 MVA hydro generators in hydro power plant (HPP) Dubrava. Computational methods for determination of natural frequency and their verification by measurements, performed on both generators in HPP Dubrava, are presented in this thesis. Key words: bulb type hydropower units, natural frequency, moment of inertia
69
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
8. Popis oznaka
ud uq us uf id iq is if i ff
iD
napon armaturnog namota u d osi napon armaturnog namota u q osi napon armaturnog namota napon uzbude struja armaturnog namota u d osi struja armaturnog namota u q osi struja armaturnog namota struja uzbude struja uzbude uzbudnika struja prigunog namota u d osi struja prigunog namota u q osi ulanani magnetski tok armaturnog namota u d osi ulanani magnetski tok armaturnog namota u q osi ulanani magnetski tok uzbudnog namota ulanani magnetski tok prigunog namota u d osi ulanani magnetski tok prigunog namota u q osi omski otpor armaturnog namota omski otpor uzbudnog namota omski otpor prigunog namota u d osi omski otpor prigunog namota u q osi induktivitet armaturnog namota u d osi induktivitet armaturnog namota u q osi induktivitet uzbudnog namota induktivitet prigunog namota u d osi induktivitet prigunog namota u q osi glavni meuinduktivitet u d osi glavni meuinduktivitet u q osi meuinduktivitet armaturnog i uzbudnog namota u d osi meuinduktivitet uzbudnog i armaturnog namota u d osi
iQ
d q f
D
Q
rs rf
rD
rQ Ld Lq Lf
LD
LQ Lad Laq Ldf L fd
70
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
LdD LDd L fD LDf LqQ LQq L Lf LD LQ L'd
' L'd
' L'q ' L'Q
meuinduktivitet armaturnog i prigunog namota u d osi meuinduktivitet prigunog i armaturnog namota u d osi meuinduktivitet uzbudnog i prigunog namota u d osi meuinduktivitet prigunog i uzbudnog namota u d osi meuinduktivitet armaturnog i prigunog namota u q osi meuinduktivitet prigunog i armaturnog namota u q osi rasipni induktivitet armaturnog namota rasipni induktivitet uzbudnog namota rasipni induktivitet prigunog namota u d osi rasipni induktivitet prigunog namota u q osi prijelazni induktivitet u d osi poetni induktivitet u d osi poetni induktivitet u q osi poetni induktivitet prigunog namota u q osi nulti induktivitet kutna brzina rotora sinkrona kutna brzina kruna frekvencija nepriguenih vlastitih oscilacija kruna frekvencija priguenih vlastitih oscilacija kutna akceleracija brzina vrtnje elektromagnetski moment generatora moment na turbini priguni moment moment inercije kut optereenja koeficijent sinkronizacijskog momenta koeficijent prigunog momenta kut izmeu armaturnog napona i armaturne struje unutarnji inducirani napon broj pari polova, Laplaceov operator 71
L0
s vl vlpr
n
melm mt m pr
J
ks kd
e0
cos faktor snage p
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
klizanje vrijeme mehanika vremenska konstanta poetna vremenska konstanta armaturnog namota prijelazna vremenska konstanta uz otvorenu armaturu poetna vremenska konstanta uz otvorenu armaturu prijelazna vremenska konstanta uz kratko spojenu armaturu poetna vremenska konstanta uz kratko spojenu armaturu prividna snaga radna snaga jalova snaga bazna snaga bazni napon bazna struja bazna impedancija bazna kutna brzina bazni magnetski tok bazno vrijeme bazni moment matrica meuinduktiviteta u d osi matrica meuinduktiviteta u q osi matrica derivacija varijabli stanja matrica varijabli stanja matrica koeficijenata varijabli stanja matrica koeficijenata ulaznih varijabli matrica ulaznih varijabli vlastita frekvencija nepriguenih oscilacija vlastita frekvencija priguenih oscilacija rezonantna frekvencija faktor priguenja vlastita vrijednost
t Tm Ts'' Td' 0 Td''0 Td' Td''
S
P
Q
SB UB IB ZB
B
TB MB
A B X X
C
D
U
f vl f vlpr f rez
72
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
9. Literatura
[L1] Siroti Z., Maljkovi Z., ''Sinkroni strojevi'', Element, Zagreb, 1996. [L2] Jadri M., Frani B., ''Dinamika elektrinih strojeva'', Sveuilite u Splitu, 1995. [L3] Dobrini J., ''Fizika: mehanika, titranje, toplina'', Sveuilite u Rijeci, 1998. [L4] Adkins B., Harley R. G., ''The General Theory of Alternating Current Machines'', Chapman and Hall, London, 1975. [L5] Chee-Mun Ong, ''Dynamc Simulation of Electric Machinery'', Prentice Hall PTR, New Jersey [L6] Dolenc A., ''Sinhroni strojevi'', Liber, Zagreb, 1976. [L7] Siroti Krajzl, ''Upute za proraun sinhronih strojeva'', Liber, 1972. [L8] Paali N., ''Osnovi regulacione tehnike'', Elektrotehniki fakultet'', Zagreb, 1977. [L9] Timoenko S., Jang.D. H., ''Via dinamika'', Graevinska knjiga, Beograd, 1962. [L10] Krause P. C., Wasynczuk O., Sudhoff S. D., ''Analysis of Electric Machinery'', IEEE Press, New Jersey [L11] Grantham W. J., Vincent T. L., ''Modern Control Systems Analysis and Design'', John Wiley & Sons Inc., 1993. [L12] Poar H., ''Proizvodnja elektrine energije, svezak II, II. nepromijenjeno izdanje'', Zagreb, 1966. [L13] Kurtovi M., ''Sinhroni strojevi, zbirka zadataka'', Sveuilite u Zagrebu, Split, 1971. [L14] Perko B., ''Zbirka zadataka, iz uvoda u teoriju elektrinih rotacionih strojeva'', Sveuilite u Zagrebu, Zagreb, 1972. [L15] ''Konar, tehniki prirunik'', TIP A. G. Mato, Samobor, 1991. [L16] Maljkovi Z., ''Utjecaj poremeaja u elektrinoj mrei na torzione oscilacije turboagregata'', Doktorska disertacija, Zagreb, 1990. [L17] Deur J., ''Slijedni sustav s vektorski upravljanim sinkronim motorom s permanentnim magnetima'', Magistarski rad, Zagreb, 1993. [L18] Maljkovi Z., Gaparac I., arko D., Magi D., ''Oscillation in Bulb Type Hydropower Unit''' [L19] Kurtovi M., ''Energetski odnosi u toku udarnog kratkog spoja sinhronog generatora'', X. struno savjetovanje elektroenergetiara Jugoslavije, Referat br. 11.02., Grafiki zavod Hrvatske, Zagreb, 1970. [L20] Siroti Z., Jari V., ''Mehanika stabilnost gljivastih generatora'', X. struno savjetovanje elektroenergetiara Jugoslavije, Referat br. 11.07., Grafiki zavod Hrvatske, Zagreb, 1970. 73
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
[L21] Jurkovi B., Siroti Z., Reicher A., ''Iskustva s cijevnim asinhronim generatorom u HE Sava Kranj'', IX. struno savjetovanje elektroenergetiara Jugoslavije, Referat br. 11.02., Vrnjaka Banja, 1968. [L22] Jari V., ''Optimalni nain ukruenja cijevnog agregata s obzirom na djelovanje kratkog spoja'', XIII. struno savjetovanje elektroenergetiara Jugoslavije, Referat br. 11.03., Bled, 1977. [L23] Orekovi G., Bacinger I., Dvekar ., ''Identifikacija uzroka njihanja hidroagregata HE Dubrava primjenom mjerenja kuta optereenja generatora'', 7. savjetovanje HO CIGR, Cavtat, 2005. [L24] uri M., ''Uproen model sinhronog generatora'', XVI. struno savjetovanje elektroenergetiara Jugoslavije, Referat br. 11.03., Opatija, 1983. [L25] Stojsavljevi M., ''Istraivanje mogunosti poveanja priguenja elektromehanikih njihanja jednomainskog sistema putem uvoenja dodatnih regulacionih signala u regulator napona elektromainskog sistema uzbude sinhronog generatora'', XIV. struno savjetovanje elektroenergetiara Jugoslavije, Sarajevo, 1979. [L26] Popovi D., ''Analiza eksperimentalnog odreivanja reaktansi i vremenskih konstanti sinhronih maina, baziranog na ogledu uspostavljanja sloenog napona po iskljuenju trofaznog ustaljenog kratkog spoja'', Referat br. 11.22., XI. struno savjetovanje elektroenergetiara Jugoslavije, Ohrid, 1972. [L27] Andlar S., Krajzl V., ''Cijevni generator Ajba'', Referat br. 11.16., XI. struno savjetovanje elektroenergetiara Jugoslavije, Ohrid, 1972. [L28] Milojkovi Z., tambuk I., mance N., ''Cijevni generator za HE Vrhovo Slovenija'', Referat br. 11.10., I. savjetovanje HK CIGR, Zagreb, 1993. [L29] Milojkovi Z., Milaini B., ''Cijevni generatori spojeni preko multiplikatora'', Referat br. 11.11., I. savjetovanje HK CIGR, Zagreb, 1993.
74
Elektromehanike oscilacije cijevnih hidroagregata
Magistarski rad
10. ivotopis
eljko Zebi roen je 2. kolovoza 1977. u Naicama. Osnovnu kolu i Prirodoslovnomatematiku gimnaziju zavrio je u Naicama. Maturirao je 1996. god. Diplomirao je 24.09.2001.god. na Fakultetu elektrotehnike i raunarstva Sveuilita u Zagrebu, na smjeru Elektrostrojarstvo i automatizacija, a na temi "On-line upravljanje preko profibus komunikacijske sabirnice". 2001. god. se zapoljava na FER-u, u Zavodu za elektrostrojarstvo i automatizaciju kao znanstveni novak - mlai asistent. Iste godine upisuje poslijediplomski studij Fakulteta elektrotehnike i raunarstva, smjer Elektrostrojarstvo na podruju elektrinih strojeva. Autor je jednog rada na znanstvenostrunom skupu s meunarodnom recenzijom te dva rada na strunim skupovima s domaom recenzijom.
75
Вам также может понравиться
- DFIG Nusmir MekićДокумент29 страницDFIG Nusmir MekićNusmir MekicОценок пока нет
- DoktoratДокумент164 страницыDoktoratni60100% (1)
- Doktorat PDFДокумент164 страницыDoktorat PDFBlažević JosipОценок пока нет
- ViewДокумент71 страницаViewDejan KuzarevskiОценок пока нет
- o GeneratorimaДокумент39 страницo GeneratorimaMarinaОценок пока нет
- 60342upravljanje Elektromotornim Pogonimav001Документ108 страниц60342upravljanje Elektromotornim Pogonimav001Karolina Hrvoje Topić100% (1)
- Mario DuricДокумент63 страницыMario DuricOsman HadzicОценок пока нет
- Proračun Asinhronog MotoraДокумент121 страницаProračun Asinhronog MotoraВладимир МалићОценок пока нет
- Utjecaj Kvalitete Napona Na Rad Asinhronih MotoraДокумент24 страницыUtjecaj Kvalitete Napona Na Rad Asinhronih Motorazdenko2014Оценок пока нет
- EWB UputstvoДокумент66 страницEWB UputstvoBiljanaKovacevicОценок пока нет
- Asihrone Električne Mašine, Konstrukcija I PrimjenaДокумент17 страницAsihrone Električne Mašine, Konstrukcija I PrimjenaBelma HuskićОценок пока нет
- 705572.006 - Marko Majceni - Modeliranje Sustava Obnove Kinetike Energije Bolida Formule 1 PDFДокумент50 страниц705572.006 - Marko Majceni - Modeliranje Sustava Obnove Kinetike Energije Bolida Formule 1 PDFMalik MilakОценок пока нет
- PrimjerДокумент18 страницPrimjerJohnny BravoОценок пока нет
- Danijel Šanti - Završni RadДокумент44 страницыDanijel Šanti - Završni RadEng-Saber MoawadОценок пока нет
- Opterecenje Istosmjernog Motora CvetkoДокумент47 страницOpterecenje Istosmjernog Motora Cvetkoafan kericОценок пока нет
- Asinhroni Kavezni MotorДокумент82 страницыAsinhroni Kavezni MotorEdin MahmutagicОценок пока нет
- Numerički Proračun Parametara Modela Sinhronog Turbogeneratora Korišćenjem Koncepta Funkcije NamotajaДокумент10 страницNumerički Proračun Parametara Modela Sinhronog Turbogeneratora Korišćenjem Koncepta Funkcije Namotajamarko7rОценок пока нет
- Marin BikicДокумент59 страницMarin BikicDejan PanticОценок пока нет
- ELEKTROTEHNIKAДокумент33 страницыELEKTROTEHNIKAbarbamarinОценок пока нет
- ELEMJE - Nastavni Materijal - LenicekДокумент73 страницыELEMJE - Nastavni Materijal - Lenicekts45306Оценок пока нет
- Asinhrone - Masine Do 59 StraneДокумент88 страницAsinhrone - Masine Do 59 StraneToni Mišić100% (1)
- 10 Lekt ER Susnjic Muzic Final LEK SPДокумент12 страниц10 Lekt ER Susnjic Muzic Final LEK SPsanitaОценок пока нет
- Asinkroni Generatori-Primjena: Papac, MarkoДокумент27 страницAsinkroni Generatori-Primjena: Papac, MarkoMarinelaОценок пока нет
- 2 - Samouzbudni Asinkroni Generator PDFДокумент7 страниц2 - Samouzbudni Asinkroni Generator PDFMartinaBraovacОценок пока нет
- Diplomski Rad - Ivan VazdarДокумент76 страницDiplomski Rad - Ivan Vazdarivan.vazdar5482Оценок пока нет
- Asinhrone MasineДокумент21 страницаAsinhrone MasineJelenaSasicMalaJecaОценок пока нет
- Jednofazni Asinkorni Motro Perilice RubljaДокумент17 страницJednofazni Asinkorni Motro Perilice RubljaIvan SusilovicОценок пока нет
- Maturski Rad Proračun Transformatora Malih Snaga Sa Ispitivanjem I Konstruktivnom IzvedbomДокумент34 страницыMaturski Rad Proračun Transformatora Malih Snaga Sa Ispitivanjem I Konstruktivnom IzvedbomFahireОценок пока нет
- SEMINARSKI RAD-mehanicka Karakteristika Asinhronih I Sinhronih MotoraДокумент27 страницSEMINARSKI RAD-mehanicka Karakteristika Asinhronih I Sinhronih MotoraRULJAОценок пока нет
- Internacionalni Univerzitet Travnik Fakultet Politehničkih Nauka ElektrotehnikaДокумент12 страницInternacionalni Univerzitet Travnik Fakultet Politehničkih Nauka ElektrotehnikaAhmed PopajaОценок пока нет
- TKM8Документ4 страницыTKM8Sanel GalijasevicОценок пока нет
- Elektrotehnička Škola Za EnergetikuДокумент26 страницElektrotehnička Škola Za EnergetikuEmrah TahicОценок пока нет
- Sinhrone MašineДокумент12 страницSinhrone Mašinenedim_3Оценок пока нет
- Visokonaponska Rasklopna Postrojenja - H.pozarДокумент340 страницVisokonaponska Rasklopna Postrojenja - H.pozarSaban Nuhanovic100% (2)
- Regulacija Brzine Vrtnje Asinkronog Motora - Blaž MarićДокумент20 страницRegulacija Brzine Vrtnje Asinkronog Motora - Blaž MarićVinko Saravanja100% (1)
- Osnove Transformatora - SkriptaДокумент123 страницыOsnove Transformatora - SkriptaZoran Lalkovic100% (1)
- 26723.Zarko_magisterij_99Документ93 страницы26723.Zarko_magisterij_99hrvoje.radanovic5Оценок пока нет
- AlternatorДокумент14 страницAlternatorAlen HrvićОценок пока нет
- Izrada Uputa Za Parametriranje Frekvencijskog Pretvaraca LusavecДокумент72 страницыIzrada Uputa Za Parametriranje Frekvencijskog Pretvaraca LusavecBlagoj StevanovskiОценок пока нет
- Vjezba Za Pp1Документ14 страницVjezba Za Pp1Davor JunušićОценок пока нет
- Asinkroni MotoriДокумент14 страницAsinkroni Motorigmae_38350% (2)
- Frekvencijski Pretvarači - Seminarski Rad - UEEДокумент16 страницFrekvencijski Pretvarači - Seminarski Rad - UEEFilip KruhekОценок пока нет
- Obracunsko Mjerno MjestoДокумент48 страницObracunsko Mjerno MjestoIvan ĐurđevićОценок пока нет
- Maturalni Rad-Frekventni PretvaraciДокумент28 страницMaturalni Rad-Frekventni PretvaraciKrunoslav ČirkeОценок пока нет
- Kolektorski StrojeviДокумент14 страницKolektorski StrojeviĆasurović AmirОценок пока нет
- Laboratorijska Vježba II - Regulacija Brzine Vrtnje Asinhronog Motora Promjenom FrekvencijeДокумент6 страницLaboratorijska Vježba II - Regulacija Brzine Vrtnje Asinhronog Motora Promjenom FrekvencijeMUJOОценок пока нет
- 2 EES I OkolisДокумент16 страниц2 EES I OkolisRoko BuzovОценок пока нет
- Trofazni Sistem Predavanja ZadaciДокумент27 страницTrofazni Sistem Predavanja ZadaciSamironi MDОценок пока нет