Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Engineering Project Titles - Ece - 2020-2021Документ11 страницEngineering Project Titles - Ece - 2020-2021Sanjivee SachinОценок пока нет
- TF5120 TC3 Robotics Mxautomation ENДокумент128 страницTF5120 TC3 Robotics Mxautomation ENTaşkınege TaşpınarОценок пока нет
- Dip Switch Settings ReadДокумент3 страницыDip Switch Settings ReadRuzhen Dimitrov100% (1)
- ITM Practical Project MbaДокумент43 страницыITM Practical Project MbaMr. 3O5Оценок пока нет
- The Timepix3 Chip: C.Brezina, Y.Fu, M.De Gaspari, V.Gromov, X.Llopart, T.Poikela, F.Zappon and A.KruthДокумент69 страницThe Timepix3 Chip: C.Brezina, Y.Fu, M.De Gaspari, V.Gromov, X.Llopart, T.Poikela, F.Zappon and A.KruthVerena StreberОценок пока нет
- Unix System Adminstration - Solaris Management ConsoleДокумент74 страницыUnix System Adminstration - Solaris Management ConsoleveerenОценок пока нет
- SAP NetWeaver AS ABAP 7.4 - Overview and Product Highlights PDFДокумент23 страницыSAP NetWeaver AS ABAP 7.4 - Overview and Product Highlights PDFTobias TolfoОценок пока нет
- JDBC 1Документ23 страницыJDBC 1karanrjoshi2003Оценок пока нет
- Embedded Software Primer - Ch6Документ26 страницEmbedded Software Primer - Ch6arunmethaОценок пока нет
- Ibrahiem Abd Elrahman MohammedДокумент2 страницыIbrahiem Abd Elrahman MohammedHema AbdoОценок пока нет
- Kyocera M8124cidn M8130cidn BrochureДокумент4 страницыKyocera M8124cidn M8130cidn BrochureNBS Marketing100% (1)
- VM 205Документ40 страницVM 205ZalОценок пока нет
- Set up PID loop in ACH550 VFDДокумент2 страницыSet up PID loop in ACH550 VFDWalter JosephОценок пока нет
- Data Structures With Python Fifo Data StructureДокумент8 страницData Structures With Python Fifo Data StructurerutikahallurОценок пока нет
- System Verilog Quick View 4pagesДокумент9 страницSystem Verilog Quick View 4pagesMani KumarОценок пока нет
- 26 09 13 Electrical Power Monitoring System - Data CentersДокумент35 страниц26 09 13 Electrical Power Monitoring System - Data CentersHujiLokoОценок пока нет
- Com 328 Review QuestionsДокумент1 страницаCom 328 Review QuestionsNjeru DanielОценок пока нет
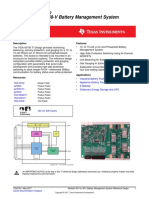
- Multicell 36V To 48V Battery Management System Reference DesignДокумент37 страницMulticell 36V To 48V Battery Management System Reference DesignkarkeraОценок пока нет
- Assignment 1Документ13 страницAssignment 1NAMRA HABIBОценок пока нет
- Manual Interface EpicenterДокумент96 страницManual Interface EpicenterJose Varela100% (2)
- DSD Lab ReportДокумент70 страницDSD Lab ReportJinesh KbОценок пока нет
- Sun Datacenter InfiniBand Switch 36 PDFДокумент24 страницыSun Datacenter InfiniBand Switch 36 PDFKokoОценок пока нет
- Troubleshooting On Assembled Printed Circuit Boards Using Analogue Signature AnalysisДокумент8 страницTroubleshooting On Assembled Printed Circuit Boards Using Analogue Signature AnalysisJORGEОценок пока нет
- IIB TutorialsДокумент68 страницIIB TutorialsDeepak Gupta100% (4)
- CD4541B - CMOS Programmable TimerДокумент19 страницCD4541B - CMOS Programmable TimerHugo PerezОценок пока нет
- 106 Sample ChapterДокумент30 страниц106 Sample ChapterMARYAM ACHIKОценок пока нет
- NRG Systems SRM Station VerificationДокумент5 страницNRG Systems SRM Station VerificationLuis PulidoОценок пока нет
- Abc It1Документ159 страницAbc It1m ganeshОценок пока нет
- DGS&D RC Laptop HPДокумент22 страницыDGS&D RC Laptop HPArun MeenaОценок пока нет
- Sequential Code in VHDLДокумент42 страницыSequential Code in VHDLAli Ahmad0% (1)