Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Mechanics of DB PDF 3Документ6 страницMechanics of DB PDF 3eysОценок пока нет
- 6 COP Care Parameter Protocol COP 1240 - 1640 - 1838 - 1840 - 2540 - LR-ForMДокумент2 страницы6 COP Care Parameter Protocol COP 1240 - 1640 - 1838 - 1840 - 2540 - LR-ForMChachou MohamedОценок пока нет
- 0xowlremhfw 'HWHFWLRQ 0Hwkrg Edvhg RQ 2/2 DQG 5Hv1Hw +/eulg 1hwzrunvДокумент6 страниц0xowlremhfw 'HWHFWLRQ 0Hwkrg Edvhg RQ 2/2 DQG 5Hv1Hw +/eulg 1hwzrunvjaspayoОценок пока нет
- Sir AquinoДокумент529 страницSir AquinoJat Bacsafra0% (2)
- Epcc03-Ihel-C00-Str-Std-000-0009 Sh. 3 of 8 (R4)Документ1 страницаEpcc03-Ihel-C00-Str-Std-000-0009 Sh. 3 of 8 (R4)ISGEC NTPC, BarauniОценок пока нет
- 2.1.2 Brosur Alternator Generator STAMFORD HC4Документ1 страница2.1.2 Brosur Alternator Generator STAMFORD HC4ウィリアムズ アンディОценок пока нет
- Boiler 52-B-101 PDFДокумент5 страницBoiler 52-B-101 PDFDedy Trianda100% (1)
- Roof Beam TableДокумент3 страницыRoof Beam TableKaye L. Dela CruzОценок пока нет
- List Hasil Interview KaryawanДокумент1 страницаList Hasil Interview KaryawanTeguh DwiyantoОценок пока нет
- Macine Element I Worksheet For Final ExamДокумент4 страницыMacine Element I Worksheet For Final Examdagimawgchew777Оценок пока нет
- Bas606 - SWS - Ground Floor Plans - 20220428Документ4 страницыBas606 - SWS - Ground Floor Plans - 20220428Mr. Vikram Arora (Assistant Professor, SSDAP)Оценок пока нет
- Alert Service Bulletin: EmergencyДокумент12 страницAlert Service Bulletin: EmergencyBruno Alonso PachecoОценок пока нет
- ISO 281-2007 Bearing Life StandardДокумент9 страницISO 281-2007 Bearing Life Standardgarron71100% (2)
- Ervice AND Arts AnualДокумент78 страницErvice AND Arts AnualMelanie GerdesОценок пока нет
- Well Control Equipment PDFДокумент104 страницыWell Control Equipment PDFAlexander ToyoОценок пока нет
- S.ashiq - ResumeДокумент2 страницыS.ashiq - ResumeRees JohnsonОценок пока нет
- N/S: V180B 50000 ': 86756277 Spare Parts ManualДокумент24 страницыN/S: V180B 50000 ': 86756277 Spare Parts ManualSerkanAl100% (2)
- Hydraulic Hammer Rental Service ChecklistДокумент1 страницаHydraulic Hammer Rental Service ChecklistFaisal BackrieОценок пока нет
- 90% Win + Suporte e ResistenciaДокумент4 страницы90% Win + Suporte e ResistenciaEdilson C.100% (1)
- Static Pressure Calculation SheetДокумент24 страницыStatic Pressure Calculation SheetMuhammad ZubairОценок пока нет
- 1 General Remarks: Original Installation and Maintenance Instructions For Bibby Torque Limiters With ModulesДокумент13 страниц1 General Remarks: Original Installation and Maintenance Instructions For Bibby Torque Limiters With ModulesAmirmasoudОценок пока нет
- Guidewires and Micro CathetersДокумент34 страницыGuidewires and Micro CathetersDivyeshОценок пока нет
- Hoist Pre-Operational Inspection Check ListДокумент1 страницаHoist Pre-Operational Inspection Check ListMohd Shareen Ezzry Mohd SomОценок пока нет
- Harsha Resume 13Документ3 страницыHarsha Resume 13shishobОценок пока нет
- Attachment Piping A4Документ8 страницAttachment Piping A4هزاع الفارسОценок пока нет
- Applied For: Roustabout: Shaik Naveed AhmedДокумент3 страницыApplied For: Roustabout: Shaik Naveed Ahmedmsk649100% (1)
- Epcc For Sewage System Refurbishment: Ubf Maintenance Sdn. Bhd. Petronas Chemicals Polyethylene SDN BHDДокумент1 страницаEpcc For Sewage System Refurbishment: Ubf Maintenance Sdn. Bhd. Petronas Chemicals Polyethylene SDN BHDMc LokiОценок пока нет
- ManualДокумент10 страницManualsayem biswasОценок пока нет
- Launching Girder PDFДокумент26 страницLaunching Girder PDFparamarthasom19740% (1)
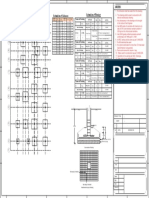
- Schedule of Footing Schedule of Columns: A B C D EF G HДокумент1 страницаSchedule of Footing Schedule of Columns: A B C D EF G HSimantaSonowalОценок пока нет