Академический Документы
Профессиональный Документы
Культура Документы
Commande Prédictive Généralisée D'une Machine
Загружено:
Hassene TrabelsiОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Commande Prédictive Généralisée D'une Machine
Загружено:
Hassene TrabelsiАвторское право:
Доступные форматы
Rpublique Algrienne Dmocratique et Populaire
Ministre de lEnseignement Suprieur et de la Recherche Scientifique
Universit de BATNA
Facult des Science de lIngnieur
Dpartement de llectrotechnique
Mmoire
Prsent par :
Benbrahim Amel
Ingnieur en Electrotechnique Universit de BATNA
Pour obtenir le diplme de
Magistre en Electrotechnique
Option : Electricit Industrielle / Commande Robuste
Thme:
Commande Prdictive Gnralise dune Machine
Synchrone Aimants Permanents
Soutenu le, 18 / 06 /2009
Devant le jury compos de:
Mme F. Zidani, Professeur Univ. Batna Prsident
Mr. M.S. Nait-Said, Professeur Univ. Batna Rapporteur
Mr. A. Makouf, Professeur Univ. Batna Co-Rapporteur
Mr. S. Drid, Matre de Conf Univ. Batna Examinateur
Mr. D. Rahem, Matre de Conf Univ. Oum.El Bouagui Examinateur
REM ERCI EM EN TS
Tout dabord, j e t i ens remerci er mon D I EU L E TOU T PU I SSAN T, qui a rendu cet
ouvrage possi bl e.
Je remerci M onsi eur M .S. N ai t -Sai d, Prof esseur au D part ement dEl ect rot echni que
U ni versi t de Bat na. Je t i ens l e remerci e pour mavoi r encadr et en part i cul i er pour son
sout i ent , ses consei l et sa pat i ence. Son expri ence et sa connai ssance ont cont ri bu ma f ormat i on
sci ent i f i que.
Je remerci e M onsi eur A. M akouf , Prof esseur au D part ement dEl ect rot echni que
U ni versi t de Bat na Je l e remerci e pour mavoi r co-encadr, pour son ori ent at i on, sa
di sponi bi l i t , son cout e et sa pat i ence pendant l a ral i sat i on de ce mmoi re.
Je remerci e M onsi eur S. D RI D , M at re de Conf rences l U ni versi t de Bat na, pour l ai de
prci euse qui l ma apport , pour accompl i r ce mmoi re, par sa mt ri se du l ogi ci el de si mul at i on et
avoi r accept de part i ci per mon j ury de mmoi re.
Je remerci e aussi l es membres du j ury:
M adame F. Z i dani , Prof esseur l U ni versi t de Bat na, pour l honneur quel l e ma f ai t en
accept ant de prsi der l e j ury de sout enance du prsent mmoi re de magi st er.
M onsi eur. D . Rahem, M at re de Conf rences, l U ni versi t . D Oum .El Bouagui , pour
i nt rt qui l a port mes t ravaux en accept ant dval uer ce mmoi re et dt re membre du j ury.
M es remerci ement aussi mes ami es : K houkha, N adi a, D al i l a et Fat i ma Pour l eurs sout i ent
et l a pat i ence quel l es ont mont r pendant l es phases di f f i ci l e de ce mmoi re.
M es parent s (L akhdar et Fat i ha), mes surs (D ori a N esri ne Hasna), mes f rres (D j al l el , Ani s,
Haki m, Fares), et ma ni ce (M al ek) l es mot s ne suf f i sent pas : j e vous adore, vous t es ma vi e.
Je remerci e gal ement t oux ceux qui mont sout enu de prs ou de l oi n durant ces derni res
annes.
Nomenclature
sc sb sa
I I I , ,
Courants des phases statoriques de la machine.
sc sb sa
, ,
Flux des phases statoriques de la machine.
f
Flux des aimants.
sc sb sa
V V V , ,
Tensions des phases statoriques.
qs ds
, I I
Courants statoriques daxe direct et en quadrature.
e
C
Couple lectromagntique.
r
C Couple rsistante.
f Coefficient de frottement.
j [ ) ( P Matrice de transformation de PARK.
p nombre de paire de ples.
J Moment dinertie des masses en rotor.
q d
L , L
Inductances cycliques directe et en quadrature.
U
0
tension continue lentre de londuleur.
d Indice de laxe direct
q Indice de laxe en quadrature
Pulsation des tensions statoriques.
Vitesse angulaire du rotor.
Constante du temps lectrique.
Liste des abrviations
MSAP Machine Synchrone Aimant Permanent
MCC Machine Courant Continu
MBPC (MPC) Model (Based) Predictive Control
MPC Model Predictive Control
IMC Internal Model Controler
GPC Generalized Predictive Control
MPHC Model Prdictive Heuristic Control
MAC Model Algorithmic Control
DMC Dynamic Matrix Control
EPSAC Extended Prediction Self Adaptive Control
EHAC Extended Horizon Adaptive Control
MUSMAR Multi Step Multivariable Adaptive Control
MURHAC Multipredictor Receding Horizon Adaptive Control
PFC Predictive Functional Control
UPC Unified Predictive Control
SOMMAIRE
Introduction Gnrale.... 1
Chapitre I
Modl i sat i on de l a MSAP
I.1 Introduction 5
I.2 Prsentation de la machine synchrone aimants permanents. 5
I.3 Domaine dapplication.. 7
I .4 Modlisation de la MSAP. 7
I.4.1 Equations des tensions et flux... 8
I.4.2 Transformation de Park.. 10
I.4.3 Expression de la puissance et du couple lectromagntique 12
I.5 Schma fonctionnelle de la MSAP. 13
I.6 Mise sous forme dquation dtat 14
I.7 Modlisation de lassociation MSAP-Onduleur de tension 16
I.7.1 Dfinition de londuleur 16
I.7.2 Modlisation de londuleur de tension.. 16
I.8 Simulation numrique... 19
I.8.1 Rsultats de simulation.. 20
I.8.2 Interprtation des rsultats. 20
I.9 Conclusion.. 21
Chapitre II
Commande Vectorielle de la MSAP
II.1 Introduction 23
II.2 Principe de la commande vectorielle.. 23
II.3 Commande vectorielle de la MSAP 25
II.3.1 Commande vectorielle de la MSAP alimente en tension. 25
II.3.1.1 Dcouplage ... 27
II.3.2 Commande vectorielle de la MSAP alimente en courant 28
II.4 Rgulation.. 30
II.4.1 Calcul des rgulateurs de courant.. 31
II.4.2 Calcul de rgulateur de vitesse. 33
II.5 Rsultats de simulation 36
II.5.1 Rsultats de simulation de la commande vectorielle de la MSAP
alimente en tension.. 35
II.5.2 Rsultats de simulation de la commande vectorielle de la MSAP
alimente en courant... 43
II.5.3 Interprtation des rsultats de simulation. 50
II.6 Conclusion. 51
Chapitre III
Commande Prdictive Gnralise de la MSAP
III.1 Introduction...... 53
III.2 Stratgie gnrale de la commande prdictive. 55
III.3 Rsum historique de la commande prdictive.. 57
III.4 Commande prdictive gnralise.... 58
III.4.1 Principe de fonctionnement de la GPC.. 58
III.4.2 Formulation du modle.. 59
III.4.3 Dveloppement de prdicteur. 61
III.4.4 Rsolution des quations Diophantiennes. 62
III.4.5 Critre doptimisation .. 64
III.5 Commande prdictive gnralise cascade.. 67
III.5.1 Dfinition des modles.. 68
III.5.2 Expression des critres.. 68
III.5.3 Rsolution de GPC cascade.... 69
III.6 Choix des paramtres de rglage du GPC.... 71
III.7 Rsultats de simulation...... 72
III.7.1 Rsultats de simulation de la GPC..... 72
III.7.2 Rsultats de simulation de la GPC cascade... 83
III.7.3 Interprtation des rsultats de simulation.. 94
III.8 Conclusion...... 96
Conclusion gnrale...... 98
Annexe........... 100
Bibliographie..... 102
Introduction Gnrale
1
Introduction Gnrale
Bien que la plus ancienne des machines lectriques industrielles, la machine courant
continu reste trs utilise et particuliremen comme actionneur. Ceci tient au fait que son
fonctionnement est dune grande simplicit, de mme que sa modlisation, mais surtout ses
performances statiques et dynamiques sont exceptionnelles. En effet le couple est le produit
vectoriel de deux grandeurs naturellement orthogonales (flux inducteurs et courant dinduit)
quasiment indpendantes et indpendantes de la vitesse et de la position du rotor [1].
Cependant, la fragilit du systme balai collecteur a toujours t un inconvnient de la
M.C.C, ce qui limite la puissance et la vitesse maximale et prsente des difficults de
maintenance et des interruptions de fonctionnement. Cest pour cette raison quon a eu intrt
utiliser des moteurs lectriques courant alternatif afin dcarter cet inconvnient.
La machine synchrone aimants permanents est un actionneur lectrique trs robuste
et prsente de faibles moments dinerties ce qui lui confre une dynamique caractrise par de
trs faibles constantes de temps et permet de concevoir des commandes de vitesse, de couple
ou de position avec une prcision et des performances dynamiques trs intressantes
(actionneurs de robotique, servomoteur, entrainement vitesse variable etc. )[1], [2]. Mais
le modle du moteur synchrone aimants permanents correspond un systme multi variable
et fortement coupl, cest pour cette raison que sa commande est plus complexe que celle
dune MCC.
La mise au point des aimants permanents base de terre rare, le dveloppement de
llectronique de puissance et la progression des organes de commande numrique fort
degr dintgration ont ouvert la voie plusieurs stratgies de commande. Parmi les
nombreuses mthodes de commande dveloppes dans la littrature technique, la commande
vectorielle par orientation du flux de la machine synchrone aimants permanent permet
denvisager des variateurs de vitesse courant alternatif trs comptitifs et aussi performants
que les variateurs courant continu.
En revanche, lorsque des performances svres sont requises, les commandes
classiques montrent vite leurs limites. En effet lune des principales difficults rencontres
dans la commande des procds est la prsence de retard dus essentiellement aux
caractristiques physique du systme contrler (constante de temps dlments chauffants,
acquisition-conversion de signaux). Ces retards sont souvent la cause de problmes
Introduction Gnrale
2
rencontrs lors de lapplication de commande classique. Cest pour rsoudre type de problme
qu t introduite la notion de commande prdictive [3].
La commande prdictive est une technique de commande avance de l'automatique.
Elle a pour objectif de commander des systmes industriels complexes. Arrive maturit,
tellement elle est suffisamment utilise dans lindustrie, dont ses diverses applications se sont
rvles trs concluantes, notamment dans les systmes robotiques, des machines lectriques,
la surveillance et la conduite des procds biotechnologiques, [4] [5].
La commande prdictive est un terme gnral qui englobe un ensemble de mthodes
diffrentes (PFC, DMC, GPC, EPSAC, NLPC...). Nanmoins, toutes ces techniques utilisent
la mme philosophie de contrle et le principe de fonctionnement est le mme
Nous nous intressons dans ce mmoire la commande prdictive gnralise (GPC).
Cette commande est introduite la fin des annes 80 et elle est considr comme tant la plus
populaire des mthodes de prdiction, particulirement pour des processus industrie, La GPC
est base sur la minimisation dun critre quadratique au sens dun horizon fuyant et dpend
de quatre paramtres qui sont les deux horizons de prdiction minimum et maximum,
lhorizon de commande et le facteur de pondration de la commande, dont lajustement
optimal ne peut tre garanti.
Organisation du mmoire
Ce mmoire est scind en trois chapitres et une conclusion.
Le premier chapitre concernera la modlisation de la machine synchrone aimants
permanents. Cette modlisation repose sur des paramtres lectriques qui dcrivent les
phnomnes lectromagntiques (rsistances et inductances) moyennant des hypothses
simplificatrices. Le modle de la MSAP en vue de sa commande est donn dans le formalisme
deux axes, appel modle de Park. Lassociation convertisseur machine est aussi donne et
est valid par simulations.
Le second chapitre sera consacr la commande vectorielle par orientation du champ
de la machine synchrone aimants permanent, dont la machine est alimente en tension puis
en courant. La thorie de cette commande permet dassimiler la machine synchrone aimant
permanent une machine courant continu excitation spare.
Introduction Gnrale
3
Le troisime chapitre prsent la commande prdictive ou nous intressons plus
particulirement la commande prdictive gnralise, on expose lhistorique de cette
stratgie de commande, et ses bases thoriques. Par la suite, en guise de validation de la
thorie expose, nous avons labor un programme de simulation sous simulink/matlab de la
dite commande. Des rsultats obtenus par simulation permettent de mettre en exergue la
performance de la commande GPC sur une MSAP.
Nous terminerons par une conclusion gnrale et nous proposerons quelques
perspectives pour la continuation future de ce travail.
CHAPI TRE I Modli sat i on de l a MSAP
5
I.1 Introduction
Ltude du comportement dun moteur lectrique est une tache difficile et qui ncessite,
avant tout, une bonne connaissance de son modle dynamique afin de bien prdire, par voie
de simulation, son comportement dans les diffrents modes de fonctionnement envisags [6].
Historiquement, le moteur courant continu (M.C.C) a constitu la seule source
lectromagntique de vitesse variable en raison de son facilit de commande. Cependant, la
fragilit du systme balai collecteur a toujours t un inconvnient de la M.C.C, ce qui limite
la puissance et la vitesse maximale et prsente des difficults de maintenance et des
interruptions de fonctionnement. Cest pour cette raison quon a eu intrt utiliser des
moteurs lectriques courant alternatif afin dcarter cet inconvnient [6].
Parmi les moteurs courant alternatif utiliss dans les entrainements vitesse variable,
le moteur synchrone aimant permanent reste un bon candidat. Son choix devient attractif et
concurrent de celui des moteurs asynchrones grce lvolution des aimants permanents
quils soient base dalliage ou terre rare. Cela leur a permis dtre utiliss comme
inducteur dans les moteurs synchrones offrant ainsi, par rapport aux autres type de moteur,
beaucoup davantage, entre autres, une faible inertie et un couple massique lev [7].
Dans ce chapitre nous prsentons la modlisation de la MSAP par la transformation
de Park, puis nous traiterons lassociation convertisseur machine. Une dmonstration des
rsultats de simulation indiquant la validation du modle utilis est aussi prsente
I.2 Prsentation de la machine synchrone aimants permanents
Le terme de la machine synchrone regroupe toutes les machines dont la vitesse de
rotation de larbre de sortie est gale la vitesse de rotation du champ tournant. Pour obtenir
un tel fonctionnement, le champ magntique rotorique est gnr soit par des aimants, soit
par un circuit dexcitation. La position du champ rotorique est alors fixe par rapport au rotor,
ce qui impose en fonctionnement normal une vitesse de rotation identique entre le rotor et le
champ tournant statorique.
Cette famille de machine regroupe en fait plusieurs sous familles :
les machines synchrone rotor bobin
les machines synchrone rluctance
CHAPI TRE I Modli sat i on de l a MSAP
6
les machines synchrone aimants permanents.
Nous intrt va plus particulirement vers cette dernire catgorie, en effet avec
lapparition daimants permanents de plus en plus performants (faible dsaimantation, nergie
maximale stocke plus grande, induction de saturation et champ coercitif plus lev).
La machine synchrone aimant permanent est devenue comptitive par rapport a la machine
asynchrone, mme dans le domaine de la moyenne puissance.
Fig. (I.1) : Photographie de moteur aimants en gomtries cylindriques.
Le stator de la machine synchrone aimant permanent est identique celui dune
machine asynchrone, il est constitu dun empilage de tle magntique qui contient des
encoches dans lesquelles sont logs trois enroulements identiques dcals entre eux de 2/3.
Le rotor de la MSAP est gnralement de deux types :
rotor possdant des pices polaires, servant la concentration du flux dinduction dans
lequel les aimants sont orients soit paralllement soit perpendiculairement
lentrefer, soit de manire plus complexe. Dans ce type de machine, linducteur est
ples saillants.
rotor sans pices polaires, donc entrefer constante, dans lequel laimantation des
aimants est gnralement perpendiculaire lentrefer.
La machine qui nous tudierons, dans ce mmoire est ples saillants.
CHAPI TRE I Modli sat i on de l a MSAP
7
Fig. (I.2) : Schma dune machine synchrone aimant permanent [8].
I.3 Domaine dapplication
Le moteur synchrone aimants permanents est utilis dans une large gamme de
puissance, allant de centaines de Watts (servomoteur) plusieurs mga Watts (systme de
propulsion des navires), dans des applications aussi diverse que le positionnement, la
synchronisation lentrainement vitesse variable, et la traction [9].
-il fonctionne comme compensateur synchrone.
-il est utilis pour les entrainements qui ncessitent une vitesse de rotation constante, tels
que les grands ventilateurs, les compresseurs et les pompes centrifuges, et grce au
dveloppement de llectronique de puissance, lassociation machine aimants convertisseur de
puissance a trouv de nombreuses applications dans les domaines trs divers tels que la robotique,
la technologie de lespace et dans dautres applications plus particulires (domestique,...).
I .4 Modlisation de la MSAP
Afin dobtenir une formulation plus simple et de rduire la complexit du modle de la
machine, ltablissement de son modle mathmatique sera dvelopp sur la base des
hypothses savoir que :
Le moteur possde une armature symtrique non sature, les inductances propre et
mutuelle sont indpendant des courants qui circulent dans les diffrents enroulements.
La distribution des forces lectromotrice, le long de lentrefer, est suppose
sinusodale.
Axe de rotor
Axe de rfrence
Vsa
Vsb Vsc
N
S
CHAPI TRE I Modli sat i on de l a MSAP
8
Les pertes fer et leffet amortisseur sont ngligs.
La permabilit des aimants est considre comme voisine de celle de lair.
Lexcitation tant faite par un aimant permanent, telle que le flux dexcitation est
considr comme constant, par ailleurs, laimant est considr comme un enroulement sans
rsistance ni inductance propre et mutuelle, mais comme source de flux [10].
I.4.1 Equations de tensions et flux
Les tensions, flux et courants statorique triphass, sont crits avec les notations
vectorielles suivantes j [
s
V , j [
s
et j [
s
I respectivement.
Lquation tension dans le rfrentiel du stator scrit [8] [11]:
] [ ] ][ [ ] [
s s s s
dt
d
I R V + (I.1)
Avec :
j [
T
cs bs as s
V V V V ] [
,
j [
T
cs bs as s
I I I I ] [
,
j [
T
cs bs as s
] [
j [
1
1
1
]
1
s
s
s
s
R
R
R
R
0 0
0 0
0 0
s
R Rsistance des enroulements statoriques.
Les flux statoriques et rotoriques ont pour expression :
j [ ] [ ] ][ [
f s ss s
I L + (I.2)
Et j [
1
1
1
1
1
1
]
1
)
3
4
cos(
)
3
2
cos(
) cos(
f s f
CHAPI TRE I Modli sat i on de l a MSAP
9
O :
sf
: Valeur crte (constante) du flux cre par laimant permanent travers les
enroulements statoriques.
sf
: Position absolue du rotor en degr lectrique
] [
ss
L tant la matrice des inductances statoriques.
Dans la machine ples saillants, la matrice des inductances propre statorique ] [
ss
L est
fonction de la position. Elle contient deux termes : j [
so
L qui est constant, et )] ( [
2
s
L qui est
en fonction de langle
m
p , tant langle lectrique et
m
est la position mcanique du
rotor par rapport au stator.
)] ( [ ] [ ] [
2 0
s s ss
L L L + (I.3)
Le terme j [
so
L pour expression
j [
1
1
1
]
1
0 0 0
0 0 0
0 0 0
0
s s s
s s s
s s s
s
L M M
M L M
M M L
L (I.4)
Le terme j [
2 S
L scrit, dans le cadre de la thorie du premier harmonique
j [
1
1
1
1
1
1
]
1
+
+
+
)
3
2
( 2 cos ) 2 cos( )
3
4
( 2 cos
) 2 cos( )
3
4
( 2 cos )
3
2
( 2 cos
)
3
4
( 2 cos )
3
2
( 2 cos ) 2 cos(
) (
2 2
L L
s s
(I.5)
Les inductances propre et mutuelle
0 s
L ,
0 s
M et
2 s
L sont des constantes.
CHAPI TRE I Modli sat i on de l a MSAP
10
En introduisant (I.2) dans (I.1) on aura :
]) [ ] ][ ([ ] ][ [ ] [
f s ss s s s
I L
dt
d
I R V + + (I.6)
On remarque que lquation (I.6) est non linaire et couple pour supprimer ce
problme on adopte des changements de variable et des transformations qui rduisent la
complexit du systme. Dans ce cas nous procdons la Transformation de Park, qui consiste
transformer les enroulements immobiles (a, b, c) par des enroulements (d, q) tourne avec le
rotor.
I.4.2 Transformation de Park
A laide de la transformation de Park, on passe des grandeurs statorique relles tension,
flux courant) leurs composantes fictives appels les composantes d-q
Fig. (I.3) : Machine quivalente au sens de Park [8].
Dans le systme dquations (I.6) effectuons le changement de la variable suivant [10]:
j [ j [ j [
j [ j [ j [
'
s dqh
s dqh
I I P
V V P
) (
) (
s
s
(I.7)
Axe d
Axe de rfrence
Vqs
N
S
Axe q
Iqs
Vds
Ids
CHAPI TRE I Modli sat i on de l a MSAP
11
Avec :
j [
1
1
1
1
1
1
]
1
)
3
4
sin( )
3
4
cos(
2
1
)
3
2
sin( )
3
2
cos(
2
1
sin cos
2
1
3
2
) (
P (I.8)
j [ ) ( P tant la matrice de la transformation de Park qui permet le passage des grandeurs
statorique ] [
s
V , ] [
s
et ] [
s
I leurs composants relatives j [
s dqh
V et j [
s dqh
I
Lapplication de la transformation de Park lquation (I.8) donne :
j [ j [ j [ j [ j [ j [ j [ j [
j [
) ) ) ( ( ) ( ) (
s s s
dt
d
d
d
I P L
dt
d
I P R V P
f
dqh ss dqh s dqh
+ + (I.9)
Avec
s
dt
d
Si on prmultiplie tous ces termes par j [
1
) (
P et en sachant que j [
1
1
1
]
1
1 0 0
0 1 0
0 0 1
s s
R R , on peut
crire les quations simplifies des tensions :
j [ j [ j [ j [ j [ j [ j [
j [
'
+
dt
d
d
d
I P L
dt
d
P I R V
f
dqh ss dqh s dqh
) ) ( ( ) (
s
1
s s
(I.10)
Avec :
j [
1
1
1
1
1
1
]
1
)
3
4
sin( )
3
2
sin( sin
)
3
4
cos( )
3
2
cos( cos
2
1
2
1
2
1
3
2
) (
1
P (I.11)
CHAPI TRE I Modli sat i on de l a MSAP
12
Les quations lectriques dans le repre de Park :
'
+ +
+
ds qs qs qs
qs ds ds ds
dt
d
I Rs V
dt
d
I Rs V
(I.12)
Les flux scrivent :
'
+
q q qs
f d d ds
I L
I L
(I.13)
En introduisant (I.13) dans (I.12) on aura Le modle lectrique du MSAP sous la forme
suivante :
'
+ + +
+
f ds ds qs qs qs qs
qs qs ds ds ds ds
I L I
dt
d
L I Rs V
I L I
dt
d
L I Rs V
(I.14)
I.4.3 Expression de la puissance et du couple lectromagntique :
Selon Park, lexpression de la puissance scrit comme suit :
qs qs ds ds
I V I V t p + ) ( (I.15)
En remplacent
ds
V et
qs
V par leur expressions il vient :
)] ( ) ( ) ( [
3
2
) (
2 2
ds qs qs ds qs qs ds ds qs ds s
I I
dt
d
dt
d
I
dt
d
I I I R t P + + + (I.16)
Do :
Le 1
er
terme reprsente la chute de tension Ohmiques (pertes par effet joule).
Le 2
me
terme reprsente la variation de lnergie magntique emmagasine.
Le 3
me
terme reprsente la puissance transfre du stator au rotor travers lentrefer
(puissance lectromagntique).
CHAPI TRE I Modli sat i on de l a MSAP
13
Sachant que :
. Ce P
e
(I.17)
Do :
] [
2
3
ds qs qs ds
I I p Ce (I.18)
En remplacent
ds
et
qs
par leur expressions il vient :
] . ) [(
2
3
qs f qs ds qs ds
I I I L L p Ce + (I.19)
Avec
p : nombre de paire de ples
Lquation de mouvement de la machine est :
dt
d
J f Cr Ce
(I.20)
Avec
J : Le couple dinertie des masses tournantes ;
Cr : Couple rsistant (ou statique) impos par la charge mcanique ;
Ce : Couple lectromagntique ;
: vitesse mcanique de rotation ;
f : Coefficients des frottements visqueux
I.5 Schma fonctionnelle de la MSAP :
Daprs les quations (I.14), (I.19) et (I.20), on obtient le systme dquations suivant :
'
+
+
dt
d
J f Cr Ce
I I I L L p Ce
I L I R V
L
I
dt
d
I L I R V
L
I
dt
d
qs f qs ds qs ds
f ds ds qs s qs
qs
qs
qs qs ds s ds
ds
ds
] . ) [(
2
3
) (
1
) (
1
(I.21)
CHAPI TRE I Modli sat i on de l a MSAP
14
Fig. (I.4) : Schma bloc dune MSAP alimente en tension
I.6 Mise sous forme dquation dtat
Considrons les tensions ) , (
qs ds
V V et le flux dexcitation
f
comme grandeurs de
commande, les courants statoriques ) , (
qs ds
I I comme variable dtat et le couple rsistant
Cr comme perturbation. A partir des quations (I.14) on peut crire le systme dquation
suivant :
j [ j [ j [ j [
j [ j [ j [ j [
'
+
+
V D X C Y
V B X A X
] [
] [
&
(I.22)
j [ A : Matrice fondamentale qui caractrise le systme
j [ B : Matrice dentre
j [ V : Vecteur de commande
j [ X : Vecteur dtat (posons, j [ j [
T
qs ds
I I X ).
Sous forme matricielle on peut crire le systme dquation (I.17) comme suit :
f
p
2
3
ds S
sL R
1
+
qs ds
L L
f
qs S
sL R
1
+
Js f
1
+
qs
V
ds
V
ds
I
qs
I
r
C
+
+
s
1
+
-
+
+
-
+
qs
L
ds
L
+
p
p
CHAPI TRE I Modli sat i on de l a MSAP
15
j [ j [ j [ j [ j [ V B X A X
dt
d
+ (I.23)
Avec :
j [ j [
T
qs ds
I I X (I.24)
j [ j [
T
f qs ds
V V V (I.25)
Et :
1
1
1
]
1
1
1
1
1
]
1
+
1
]
1
1
1
1
1
]
1
1
1
1
]
1
f
sq
ds
q q
d
qs
ds
q
s
q
d
d
q
d
s
qs
ds
V
V
L L
1
0
L
I
I
L
R
L
L
L
L
L
R
I
I
0
0
1
(I.26)
Et on pose :
j [
L
R
L
L
L
L
L
R
A
q
s
q
d
d
q
d
s
1
1
1
1
]
1
Et j [
1
1
1
1
]
1
q q
d
L L
1
0
L
B
0
0
1
On peut crire la matrice j [ A comme suit :
j [
1
1
1
1
]
1
+
1
1
1
1
]
1
0
0
L
L
L
L
L
R
0
0
L
R
A
q
d
d
q
q
s
d
s
(I.27)
Et :
j [
1
1
]
1
+
1
1
1
1
]
1
q
q
d
L
0 0
0 0
L
L
B
1
0
0
1
0
0 0
1
(I.28)
CHAPI TRE I Modli sat i on de l a MSAP
16
I.7 Modlisation de lassociation MSAP-Onduleur de tension
Les onduleurs de tension, associs aux machines courant alternatif, sont de nos jours
trs largement utiliss dans les systmes d'entranement industriels. En premier lieu, les
progrs en matire de semi-conducteur ont permis la ralisation de convertisseurs statiques de
plus en plus performants. En second lieu, l'volution des techniques numriques, notamment
l'utilisation sans cesse grandissante des processeurs de signaux (DSP "Digital Signal
Processing") [11], permet dsormais d'excuter en temps rel des algorithmes complexes de
contrle des convertisseurs.
II.7.1 Dfinition de londuleur
Londuleur est un convertisseur statique assurant la conversion continu-alernatif. Si on
dispose lentre dune tension continue, grce des semi-conducteurs, on relie chacune des
bornes du rcepteur une tension tantt positive, tantt ngative [12] [13].
Par une squence adquate de commande des semi-conducteurs, il est donc possible de
produire la sortie du londuleur une tension alternative de valeur moyenne nulle. Cette
tension peut comporter un ou plusieurs crneaux par alternance suivant quil sagit dune
commande un crneau par alternance ou dune commande par Modulation de Largeur
dImpulsions (Pulse Width Modulation, en anglo-saxon) [12].
On distingue plusieurs types donduleurs :
Selon la source :
onduleurs de tension,
onduleurs de courant ;
Selon le nombre de phases (monophas, triphas, etc.),
Selon le nombre de niveaux (2,3, etc.).
I.7.2 Modlisation de londuleur de tension
Londuleur de tension alimente la MSAP peut tre idalement reprsent selon la
figure (I.5), o T
i et i
'
T (i=a, b, c) sont des transistors MOSFET,
i
S et
i
S
'
sont les
commandes logiques qui leur sont associes telle que :
- si
i
S = 1, linterrupteur T
i
est passant et
i
'
T est ouvert,
- et si
i
S = 0, linterrupteur T
i
est ouvert et
i
'
T est passant.
CHAPI TRE I Modli sat i on de l a MSAP
17
U
0
/2
U
0
/2
cs
V
0
U
2
k
3
k
3
k
1
k
2
k
1
k
as
V
bs
V
c
b
a
ca
U
ab
U
bc
U
cs
I
as
I
bs
I
0
n
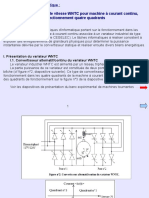
Le convertisseur cot rseau est constitue dun redresseur triphas diodes et dun
filtre, et le convertisseur cot machine, et un onduleur de tension triphas
Fig. (I.5) : Schma de lassociation machine synchrone-onduleur de tension.
On considre lalimentation de londuleur est comme une source parfaite, suppose
tre constitue par deux gnrateurs de f..m gale
2
0
U
connects entre eux par un point
not .
0
n Londuleur est constitu de trois bras, chaque bras est constitu de deux transistors
dont la commande est complmentaire. Les transistors sont shunts par des diodes de
rcupration, Chaque bras de londuleur peut tre prsent par un interrupteur deux postions
comme lindique la figure (I.6). La machine synchrone est connecte en toile,
0
U est la
tension continue alimentant londuleur de tension.
Les tensions composes sont obtenues partir des sorties de londuleur :
Fig. (I.6): Schma quivalent de londuleur
T
a
L
T
b
T
c
T
a
c
Rseau
Triphas
T
b
T
c
MSAP
CHAPI TRE I Modli sat i on de l a MSAP
18
Les tensions de lignes dlivres par londuleur sont :
) (
0 b a bs as ab
S S U V V U (I.29)
) (
0 c b cs bs ab
S S U V V U (I.30)
) (
0 a c as cs ab
S S U V V U (I.31)
Les tensions
as
V
,
bs
V et
cs
V forment un systme de tension triphases quilibres alors :
De (I.29) et (I.31) en trouve
) 2 (
3
0
c b a as
S S S
U
V (I.32)
De (I.29) et (I.30) en trouve
) 2 (
3
0
c a b bs
S S S
U
V (I.33)
De (I.30) et (I.31) en trouve
) 2 (
3
0
b a c cs
S S S
U
V (I.34)
Donc :
1
1
1
]
1
1
1
1
]
1
1
1
1
]
1
c
b
a
cs
bs
as
S
S
S
U
V
V
V
2 1 1
1 2 1
1 1 2
3
1
0
(I.35)
Dans notre travail, londuleur est command par la technique de Modulation de la
Largeur dImpulsion (MLI). Elle consiste imposer aux bornes de la machine des tensions,
haches frquence fixe, voluant en fonction des rfrences de tension obtenues partir des
rgulateurs des courants. A laide dun signal triangulaire appel porteuse, ces tensions sont
modules en largeur dimpulsion afin de dterminer les instants de commutation et la dure de
conduction de chaque interrupteur de londuleur. A chaque instant, lun des deux interrupteurs
de chaque bras est en conduction et lautre est bloqu.
CHAPI TRE I Modli sat i on de l a MSAP
19
Fig. (I.7) : Schma de principe de la technique triangulo-sinusodale
I.8 Simulation numrique
Nous avons simul le modle dune machine synchrone aimants permanents dont les
paramtres sont indiqus au niveau de lannexe.
La figure (I.8) illustre les rsultats de la simulation de la MSAP, en premire tape
pour un dmarrage vide sous une alimentation de tension efficace U=220 V et de
frquence 50 Hz. En deuxime tape on applique un couple rsistant de 10 N.m linstant
t = 6 s.
Nous avons relev le comportement de la vitesse, du couple lectromagntique, les
courant directe et en quadratique
ds
I et
qs
I
Onde porteuse
-
-
-
+
+
+
bn
V
an
V
cn
V
1
0
1
0
1
0
CHAPI TRE I Modli sat i on de l a MSAP
20
I.8.1 Rsultats de simulation :
Fig. (I.8): Rsultats de simulation lors dun dmarrage en charge t=6s
I.8.2 Interprtation des rsultats
On note des oscillations du couple instantan lors de la mise sous tension pendant une
dure trs courte, aprs la disparition du rgime transitoire, le couple tend vers zro puisque
on a annul le couple rsistant, La vitesse se stabilise 104.6 rad/s puisque le moteur possde
3 ples.
Lapplication de la charge entraine une variation de vitesse pendant un bref de temps,
puis elle se stabilise au synchronisme. On remarque aussi une augmentation du couple pour
subvenir la charge applique
0 2 4 6 8 10
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 2 4 6 8 10
0
10
20
30
40
50
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 2 4 6 8 10
0
50
100
150
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 2 4 6 8 10
-10
0
10
20
30
40
50
t emps (s)
c
o
u
r
a
n
t
i
s
(
A
)
CHAPI TRE I Modli sat i on de l a MSAP
21
I.9 Conclusion
Dans ce chapitre la modlisation de la MSAP par la transformation de Park est
prsente. Une simulation numrique permis de valider le modle MSAP utilis.
Dans les chapitres suivants, il sera question de sintresser la commande de la MSAP
en vectorielle et en prdictive.
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
23
II.1 Introduction
Par le dcouplage entre la magntisation en flux et la production du couple
lectromagntique la machine courant continu est parfaitement adapte aux traitements
vitesse variable, mais la prsence du systme balai collecteur limite la puissance et la vitesse
maximale est prsente des difficults de maintenance et des interruptions de fonctionnement.
Pour toutes ces raisons, la machine synchrone aimants permanents tend se substituer la
machine courant continu. Cette volution, motive par d'indniables qualits de robustesse
et de fiabilit. Toutefois, un problme majeur se pose : le modle du moteur synchrone
aimants permanents correspond un systme multi variable et fortement coupl, cest pour
cette raison, une mthode de commande dite dorientation du flux, t propose par
Blaschke en 1972 [14], elle na cependant pas eu tout de suite un grand essor car les
rgulations, lpoque, reposaient sur des composant analogiques, limplantation de la
commande tait alors difficile. Avec lvnement des microcontrleurs et des dispositifs
permettant le traitement du signal, il est devenu possible de raliser une telle commande un
cot raisonnable. Cela a conduit une explosion des recherches et des applications relatives
la commande vectorielle de la machine synchrone aimants permanents, qui est lobjectif de
ce chapitre.
II.2 Principe de la commande vectorielle
Lide fondamentale de cette mthode de commande est de ramener le comportement
de la MSAP celui dune MCC. Cette mthode se base sur la transformation des variables
lectriques de la machine vers un rfrentiel qui tourne avec le vecteur du flux. Par
consquent, ceci permet de contrle le flux de la machine avec la
ds
I du courant statorique.
Tandis que, la composante
qs
I permet de contrler le couple lectromagntique correspond
au courant induit de la MCC.
Si le courant
ds
I est dans la mme direction que le flux rotorique, le flux statorique
suivant laxe (d) sajoute au flux des aimants, ce qui donne une augmentation au flux
dentrefer. Dautre part, si le courant
ds
I est ngatif, le flux statorique sera en opposition
celui du rotor, ce qui donne une diminution du flux dentrefer (dfluxage).
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
24
Le couple lectromagntique dvelopp par la MSAP peut scrire dans le rfrentiel de Park
(d, q) sous la forme suivante :
] ) [(
2
3
qs f qs ds qs ds
I I I L L p Ce +
(II.1)
Fig. (II.1): Passage de systme triphas au systme biphas.
La stratgie la plus souvent utilise consiste maintenir le flux de raction dinduit en
quadrature avec le flux rotorique, comme il est illustr la figure (III.2), ou les aimants sont
remplacs par un bobinage travers par un courant
f
I constant produisant un flux quivalent
celui des aimants.
qs ds
I I I 0 (II.2)
f f f
I L
(II.3)
Pour tout rgime, le flux et le courant reste en quadrature de sorte que lvolution du
couple suit celle de
qs
I puisque
qs
KI Ce
(II.4)
Avec :
f
p K
2
3
(II.5)
b
c
a
I
I
I
c
I
b
I
d
d
q
I
q
I
a
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
25
Fig. (II.2) : Commande par orientation du champ de la MSPA (
ds
I nul).
On remarque que lexpression du couple lectromagntique est la mme que celle
dune machine a courant continu, ou les courants :
f
I et
qs
I produisent respectivement les
flux rotorique et statorique sparment.
II.3 Commande vectorielle de la MSAP
Il existe deux mthodes distinctes pour contrler le courant :
Lune ne ncessite pas la connaissance du modle lectrique de la machine et consiste
imposer directement les courants de phase dans une bande autour des courants de rfrence,
cest la mthode de contrle par des rgulateurs hystrsis.
Lautre mthode exige la connaissance du modle de la machine et permet en
fonction de lerreur des courants de phase par rapport leurs rfrences de dterminer
les rfrences des tensions qui seront imposes aux bornes de la machine grce un onduleur
de tension command en modulation de largeur dimpulsion (M.L.I).
II.3.1 Commande vectorielle de la MSAP alimente en tension
La commande vectorielle porte en gnral sur des machines alimentes en tension et
rgules en courant sur les axes d et q. Cette topologie permet une meilleure dynamique dans
la commande du couple tout en vitant les inconvnients dune alimentation en courant.
La figure (II.3) reprsente le schma bloc dune rgulation de vitesse de la MSAP
alimente en vitesse et commande par orientation du flux
qs
i
d
q
qs
V
f
V
f
i
ds
V
0
ds
i
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
26
Fig. (II.3) : Schma bloc dune rgulation de vitesse de la MSAP alimente en tension et
commande par orientation du flux [15].
Les principaux constituants dans la commande vectorielle sont la boucle de rgulation
de vitesse, celle des courants
ds
I et
qs
I et transformation de Park et Concordia.
La vitesse est rgule travers la boucle externe du bloc, la sortie de son rgulateur est
le couple lectromagntique de rfrence
*
Ce ou le courant de rfrence *
qs
I . Il est limit
de manire tenir compte des caractristiques de londuleur et de la surcharge de la machine.
*
qs
I est compar la valeur
qs
I issue de la mesure des courants rels. Lerreur sollicite
lentre du rgulateur de rfrence
*
qs
V .
En parallle avec cette boucle interne, on trouve une boucle de rgulation de
ds
I . Le courant
ds
I de rfrence est maintenu zro [15].
La sortie des rgulateurs de
ds
I et
qs
I donnent des tensions de rfrence *
ds
V et
*
qs
V
et par la transformation de Park, on obtient les rfrences de tensions
*
as
V ,
*
bs
V et
*
cs
V , qui
sont les tension de la commande de londuleur commande MLI.
dt
d
ref
*
ds
V
0 *
ds
I
+
-
*
qs
V
-
Rgulateur
de vitesse
+
-
*
qs
I
Rgulateur
de courant
ds
I
Capteur de
position
Rgulateur
de courant
qs
I
qs
I
ds
I
Onduleur
MLI
MSAP
d.q
a.b.c
C
d.q
a.b.c
+
B
l
o
c
d
e
d
c
o
u
p
l
a
g
e
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
27
Le systme dquation (I.21) introduit au chapitre prcdent prsent des non linarits
dues essentiellement la prsence des termes
ds
I ,
qs
I et
qs ds
I I pour cette raison
nous allons ajouter des termes de dcouplage afin de rendre les axes d et q compltement
indpendantes, ce dcouplage permet surtout dcrire les quations de la machine et de la
partie rgulation dune manire simple et ainsi de calculer les coefficients des rgulateurs.
II.3.1.1 Dcouplage :
Les quations de la MSAP commande par orientation du flux :
qs qs ds
ds
ds ds s
I L V
dt
I d
L I R + (II.6)
f ds ds qs
qs
qs qs s
I L V
dt
I d
L I R + + + (II.7)
On tient signaler ici que le schma bloc de la structure de commande en tension
contient un bloc de compensation dont les quations sont donnes comme suit :
Posons :
'
+
+
d qs qs
q ds ds
e V V
e V V
1
1
(II.8)
Avec
qs qs q
I L e (II.9)
f ds ds d
I L e +
(II.10)
'
d qs qs
q ds ds
e V V
e V V
1
1
(II.11)
d
e et
q
e reprsentent les f.e.m quil faut compenser.
Alors on peut donner le schma bloc de la compensation par la figure (II.4)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
28
1 ds
V
1 qs
V
ds
I
qs
L
ds
L
f
qs
I
q
e
qs
V
d
e
-
+
ds
V
+
+
-
+
Fig. (II.4): Schma bloc de dcouplage.
II.3.2 Commande vectorielle de la MSAP alimente en courant
Dans certaines applications, la prfrence est donne une commande en courant. Cette
commande peut tre ralise en utilisant un commutateur de courant ou un onduleur de
tension rgul en courant ou moyen dun rgulateur linaire classique ( PI ) ou hystrsis.
La figure (II.5) reprsente le schma bloc dune rgulation de vitesse de la MSAP
alimente en courant et commande par orientation du flux.
Fig. (II.5) : Schma bloc dune rgulation de vitesse de la MSAP alimente en courant et
commande par orientation du flux.
ds
I
- +
ref
Capteur de
position
-
-
-
+
+
+
0 *
ds
I
+
-
-
Rgulateur
de vitesse
+
*
qs
I
Rgulateur
de courant
ds
I
Rgulateur
de courant
qs
I
qs
I
Onduleur
MLI
MSAP
d.q
a.b.c
d.q
a.b.c
C
dt
d
1
0
1
0
1
0
as
i
bs
i
cs
i
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
29
Le principe gnral de ce type de stratgie consiste maintenir la variation du courant
dans chaque phase dans une bande de largeur donne, centre autour des courants de
rfrence .Ce principe est schmatis par la figure (II.6).
Cette stratgie permet une raction rapide des variations de la consigne ou des paramtres de
la partie puissance (charge).
Un comparateur hystrsis mesure la diffrence entre le courant rel et sa rfrence.
ref s s s
I I I
(II.12)
Si h I
s
: la tension est forc son niveau minimal pour faire dcrotre le courant,
et le comparateur hystrsis sature
i
'
T qui continu conduire
Si h I
s
: la tension est force son niveau maximal pour faire accrotre le
courant, et le comparateur hystrsis bascule et sature
i
T do la nature itrative de
lopration.
Pour chaque bras de londuleur, les transistors
i
T et
i
'
T sont relis lun la sortie du
comparateur hystrsis, lautre cette mme sortie via un inverseur.
Lentre du comparateur est attaque par la diffrence I entre le courant rel
s
I et le courant
de rfrence
ref s
I . Le changement de signe de cette diffrence entrane le basculement du
comparateur, par consquent lun des deux transistors
i
T ou
i
'
T qui conduisait initialement
cesse de conduire et laisse la relve lautre.
Les fonctions logiques
i
S reprsentant les interrupteurs sont dfinies par les quations
h I h si k S k S
h I si k S
h I si k S
i i
i
i
< < +
< +
> +
: ) ( ) 1 (
: 1 ) 1 (
: 0 ) 1 (
Avec:
h : Bande d'hystrsis.
) (k S
i
: Valeur de
i
S l'instant
s
kT
) 1 ( + k S
i
: Valeur de
i
S l'instant
s
T k ) 1 ( +
s
T : Priode d'chantillonnage.
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
30
s L R
1
qs s
+ Js f
1
+
K
K
sq
V
+
-
+
r
C
qs
I
-
s
1
'
c
S
1
0
+
+
ref as
i
1
0
1
0
ref cs
i
ref bs
i
bs
i
cs
i
c
S
a
I
c
I
b
I
+
as
i
'
a
S
b
S
'
b
S
a
S
Les courants de rfrence sont :
) sin( 2 t I I
eff ref as
(II.13)
)
3
2
sin( 2
t I I
eff ref bs
(II.14)
)
3
2
sin( 2
+ t I I
eff ref cs
(II.15)
Pour un onduleur triphas, le schma de commande est le suivant :- -
-
Fig. (II.6) : Comparaison des courants de rfrences avec les courants rels
II.4 Rgulation
Lorsque le dcouplage entre laxe d et laxe q est ralis et que
d
I est maintenu nul,
la figure (I.4) de chapitre prcdent se rduit la figure (II.7). Cette dernire figure montre
que laxe q de la machine se rduit alors un schma quivalent celui dun moteur courant
continu excitation spar
Fig. (II.7) : Schma bloc reprsentant la MSAP aprs lorientation du champ.
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
31
II.4.1 Calcul des rgulateurs de courant
Le schma du control des courants de la commande vectorielle se rduit deux
boucles distinctes comme lindique la figure suivante :
Fig. (II.8) : Commande des courants en deux boucles indpendantes
A partir des quations (II.6), (II.7) et (II.11), on peut crire les fonctions de transfert
suivantes :
, )
1
1
1
sd
sd
ds
s
d
V
I
s T
R
s F
+
(II.16)
, )
1
1
1
sq
sq
qs
s
q
V
I
s T
R
s F
+
(III.17)
ref sq
I
sq
I
sq1
V
s T
R
qs
s
+ 1
/ 1
Rgulation du couple
Reg q
sd
I
s T
R
ds
s
1
/ 1
+
Reg d
Rgulation du flux
ref sd
I
sd1
V
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
32
Avec
s
ds
ds
R
L
T (II.18)
s
qs
qs
R
L
T (II.19)
Les rgulateurs ) (Re
d
g et ) (Re
q
g sont choisis comme tant des rgulateurs proportionnels
et intgraux, avec des fonctions de transfert de la forme suivante :
, ) ) 1 ( Re s
K
K
s
K
s g
id
pd
id
d
+ (II.20)
, ) ) 1 ( Re s
K
K
s
K
s g
iq
pq iq
q
+ (II.21)
Les fonctions de transfert en boucle ouverte sont donne par :
s T
R
s
K
K
s
K
FTBO
ds
s
id
pd
id
d
+
+
1
1
) 1 ( (II.22)
s T
R
s
K
K
s
K
FTBO
qs
s
iq
pq iq
d
+
+
1
1
) 1 (
(II.23)
La dmarche suivre consiste procder la compensation de la constante de temps du
systme, en posant :
ds
id
pd
T
K
K
(II.24)
qs
iq
pq
T
K
K
(II.25)
Ce qui ramne les fonctions de transfert des courants en boucle ferme aux expressions
suivantes :
ref sd
sd
d
d
I
I
s
FTBF
1
1
(II.26)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
33
Cr
filtre
s
K
K
i
p
+
f s J +
1
ref
Ce
ref sq
sq
q
q
I
I
s
FTBF
1
1
(II.27)
Avec
id
s
d
K
R
(II.28)
iq
s
q
K
R
(II.29)
Les boucles de courants correspondent donc un premier ordre, il suffit de fixer la
dynamique du systme travers un choix appropri de
d
et
q
. Celles-ci sont choisies de
manire ce que la constante de temps du systme en boucle ferme rgul soit infrieure la
constante de temps en boucle ouverte.
II.4.2 Calcul de rgulateur de vitesse
Le rgulateur de vitesse permet la dtermination du couple de rfrence afin de
maintenir la vitesse constante. En insrant un rgulateur PI dans la boucle de vitesse on
obtient le schma de la figure suivante :
Fig. (II.9) : Commande de la vitesse
On a ajout cette boucle un filtre pour liminer le dpassement d lexistence dun (Zro)
dans la FTBF du Systme (machine + rgulateur ).
La fonction de transfert du rgulateur de vitesse est donne par :
) (
p
i
p
i
p
K
K
s
s
K
s
K
K + + (II.30)
PI
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
34
La fonction de transfert de la vitesse en boucle ouverte est donne par (Cr=0) :
f j K
K
s
s
K
FTBO
p
i
p
+
+
s
1
) ( (II.31)
En adoptant la mthode de placement de ple et la fonction de transfert de la vitesse en
boucle ferme est donne par:
i p
p
i
p
ref
K s K f Js
K
K
s K
s
s
FTBF
+ + +
+
) (
) (
) (
) (
2
(II.32)
La
FTBF possde une dynamique de 2
me
ordre, par identification la forme
canonique du 2
me
ordre lquation caractristique peut tre reprsente comme suit :
1 )
2
(
1
0
2
0
+ + s s
(II.33)
Alors
2
1
o i
K
J
(II.34)
o i
p
K
K f
+
2
(II.35)
Avec : coefficient damortissement
On choisit alors le coefficient damortissement et
o
on dduit
i
K et
p
K
Avec
2
o i
J K (II.36)
f
K
K
i
p
0
2
(II.37)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
35
II.5 Rsultats de simulation
Les rsultats suivants reprsentent la rponse de la MSAP lors dune commande par
orientation du flux, Dans un premier temps la MSAP alimente en tension. Puis dans un
second temps lalimentation est en courant. Les schmas bloc reprsentant le systme global
de commande en tension et en courant sont donns par les figures (II.3) (II.5)
Les paramtres de la MSAP sont soumis des variations qui peuvent tre dues la
saturation ou lchauffement, il est donc important dtudier linfluence de la variation des
paramtres caractrisant le modle sur les performances de la commande afin dvaluer la
robustesse de cette dernire. Nous allons varier linertie, le flux et la rsistance statorique,
ensuite nous effectuerons une variation simultane de tous les paramtres, le tableau suivant
rsume les variations et les courbes correspondantes.
J R
s
f
L
ds
L
qs
a J
nom
R
s nom
f
nom
L
ds nom
L
qs nom
b + 100% + 100%
f
+ 100 % + 100 %
c + 100% + 50%
f
+ 100 % + 100 %
d + 100% -50%
f
+ 100 % + 100 %
e + 100% -50%
f
+ 50% + 100 %
f + %100 + 100% 0.8
f
+ 100 % + 100 %
g + 100% + 100% 1.1
f
+ 100 % + 100 %
h - 50% + 100% 1.1
f
+ 100 % + 100 %
i - 50% -50% 0.8
f
+ 100 % + 100 %
j - 50% -50% 1.1
f
-50% -50%
Tableau (II.1)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
36
Les simulations sont ralises pour un dmarrage vide avec lintervention de la charge
t=0.4 et inversion de la consigne de la vitesse t=0.7s et compar les rsultats avec la
rponse obtenue sans variation dans le modle
II.5.1 Rsultats de simulation de la commande vectorielle de la MSAP
alimente en tension
Nous avons relev le comportement de la vitesse, le couple lectromagntique, le
courant
ds
I et le courant
qs
I .
Pour les paramtres de la MSAP voir annexe.
Fig. (II.10) : Rsultats de simulation lors dun dmarrage vide pour une consigne de
100rd/s.
0 0.2 0.4 0. 6 0.8 1
0
20
40
60
80
100
120
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0.2 0.4 0.6 0. 8 1
-5
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.2 0.4 0. 6 0.8 1
-5
0
5
t emps (s )
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.2 0.4 0.6 0. 8 1
-10
0
10
20
30
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
37
Fig. (II. 11) : Rsultats de simulation lors dun dmarrage en charge t=0.4s pour une
consigne de vitesse de 100rd/s
Fig. (II. 12) : Rsultats de simulation lors dun dmarrage en charge t=0.4s pour une
consigne de vitesse de 100rd/s avec linversion de la consigne (-100rd/s)
0 0. 2 0.4 0. 6 0.8 1
0
20
40
60
80
100
120
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-5
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-8
-6
-4
-2
0
2
4
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-10
0
10
20
30
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-20
-15
-10
-5
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-10
-5
0
5
10
15
20
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
38
Fig. (II.13) : Rsultats de simulation lors dun dmarrage vide et inversion de la consigne
de vitesse -100rd/s en mode dflux
Fig. (II.14) : Rsultats de simulation lors dun dmarrage en charge t=0.4s et inversion de la
consigne de vitesse -100rd/s en mode dflux
0 0. 2 0.4 0. 6 0.8 1
-100
0
100
200
t emps ( s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-50
-40
-30
-20
-10
0
10
20
t emps ( s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-20
-10
0
10
20
30
40
t emps ( s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-80
-60
-40
-20
0
20
40
t emps ( s)
c
o
u
r
a
n
t
i
s
q
(
A
)
0 0.2 0.4 0. 6 0.8 1
-100
0
100
200
t emps (s )
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0.2 0.4 0.6 0. 8 1
-40
-30
-20
-10
0
10
20
30
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.2 0.4 0. 6 0.8 1
-20
-10
0
10
20
30
40
50
t emps (s )
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.2 0.4 0.6 0. 8 1
-60
-40
-20
0
20
40
60
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
39
Fig. (II. 15) : Rsultats de simulation lors des variations de linertie J
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sortie (sans v ariation)
sortie (+100% de J)
sort ie (-50% de J)
sortie (+50% de J)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-60
-40
-20
0
20
40
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-10
0
10
20
30
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
-50
0
50
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
40
Fig. (II. 16) : Rsultats de simulation lors des variations du flux
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariation)
sortie (Fi e*0. 8)
sortie (Fi e*1. 1)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
0
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-10
0
10
20
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
41
Fig. (II. 17) : Rsultats de simulation lors des variations de la rsistance R
S
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariation)
sortie (+100% de Rs)
sort ie (-50% de Rs)
sortie (+50% de Rs)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-50
0
50
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-50
0
50
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
0
100
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
42
Fig. (II. 18) : Rsultats de simulation lors des variations simultanes des paramtres de la
MSAP suivant le tableau (II.1)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
consigne
a
b
c
d
e
f
g
h
i
j
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
-50
0
50
temps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-50
0
50
temps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
0
100
temps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
43
II.5.2 Rsultats de simulation de la commande vectorielle de la MSAP
alimente en courant
Une dmarche identique celle adopte pour la commande vectorielle de la MSAP
alimente en tension est retenue pour les essais dans le cas alimente en courant.
Fig. (II.19) : Rsultats de simulation lors dun dmarrage vide pour une consigne de
100rd/s.
0 0. 2 0.4 0. 6 0.8 1
0
20
40
60
80
100
120
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-5
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-20
-15
-10
-5
0
5
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-10
0
10
20
30
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
44
Fig. (II. 20) : Rsultats de simulation lors dun dmarrage en charge t=0.4s pour une
consigne de vitesse de 100rd/s
Fig. (II. 21) : Rsultats de simulation lors dun dmarrage en charge t=0.4s pour une
consigne de vitesse de 100rd/s avec linversion de la consigne (-100rd/s)
0 0.2 0.4 0. 6 0.8 1
0
20
40
60
80
100
120
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0.6 0. 8 1
-5
0
5
10
15
t emps (s )
c
o
u
p
l
e
(
N
.
m
)
0 0.2 0.4 0. 6 0.8 1
-20
-15
-10
-5
0
5
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0.6 0. 8 1
-10
0
10
20
30
t emps (s )
c
o
u
r
a
n
t
i
s
q
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-150
-100
-50
0
50
100
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-20
-10
0
10
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-20
-10
0
10
20
30
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
45
Fig. (II.22) : Rsultats de simulation lors dun dmarrage vide et inversion de la consigne
de vitesse -100rd/s en mode dflux
Fig. (II.23) : Rsultats de simulation lors dun dmarrage en charge t=0.4s et inversion de la
consigne de vitesse -100rd/s en mode dflux
0 0.2 0.4 0. 6 0.8 1
-100
0
100
200
t emps (s )
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0.2 0.4 0.6 0. 8 1
-50
-40
-30
-20
-10
0
10
20
t emps ( s)
c
o
u
p
l
e
(
N
.
m
)
0 0.2 0.4 0. 6 0.8 1
-30
-20
-10
0
10
20
30
40
t emps (s )
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.2 0.4 0.6 0. 8 1
-100
-80
-60
-40
-20
0
20
40
t emps ( s)
c
o
u
r
a
n
t
i
s
q
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-100
0
100
200
t emps ( s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-40
-30
-20
-10
0
10
20
t emps ( s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-20
-10
0
10
20
30
40
t emps ( s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-60
-40
-20
0
20
40
60
t emps ( s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
46
Fig. (II. 24) : Rsultats de simulation lors des variations de linertie J
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sortie (sans v ariat ion)
sortie (+100% de J)
sort ie (-50% de J)
sorti e (+50% de J)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-60
-40
-20
0
20
40
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-50
0
50
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
-50
0
50
100
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
47
Fig. (II. 25) : Rsultats de simulation lors des variations du flux
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariation)
sortie (Fi e*0. 8)
sortie (Fi e*1. 1)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-50
0
50
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-50
0
50
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
48
Fig. (II. 26) : Rsultats de simulation lors des variations de la rsistance R
s
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sot ie (sans v ariation)
sort ie (+100% Rs )
sort ie (-50% Rs)
sortie (+50% Rs)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
0
100
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
0
100
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-200
-100
0
100
200
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
49
Fig. (II. 27) : Rsultats de simulation lors des variations simultanes des paramtres de la
MSAP suivant le tableau (II.1)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
consigne
a
b
c
d
e
f
g
h
i
j
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-50
0
50
t emps (s)
p
o
s
i
t
i
o
n
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-50
0
50
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
0
100
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
50
II.5.3 Interprtation des rsultats de simulation
la figure (II.10) montre le comportement de la MSAP pour une consigne de 100 rd/s
lors dun dmarrage vid, on remarque que lallure de la vitesse suit parfaitement sa
consigne, qui est atteint trs rapidement, on remarque aussi des oscillations du couple
instantan lors de la mise sous tension, aprs la disparation du rgime transitoire, le couple
tends vers zro, meme remarque pour les courants statoriques
ds
I et
qs
I
la figure (II.11) montre lapplication de la charge Cr=10 N.m t=0.4s, on remarque
que linfluence de cette charge sur la vitesse est pratiquement ngligeable, le couple
lectromagntique dbute par une valeur de 0 12 N.m et se stabilise la valeur du couple
rsistant (10N.m), le courant statorique
qs
I est limage du couple lectromagntique et le
courant statorique
ds
I est nul ce qui indique que la commande vectorielle est effective.
la figure (II.12) montre linversion de la consigne de vitesse (de 100 rd/s -100 rd/s),
on remarque des piques de couple, et des courants statoriques
ds
I et
qs
I de signe dpendant
de laugmentation ou de la diminution de la consigne de vitesse et la vitesse suit sa nouvelle
consigne.
les figures (II.13) et (II.14) montrent le fonctionnemnt en mode dflux le systme
rpond pratiquement sans dpassement mais avec un temps de rponse suprieur celui du
mode normal, au dbut le courant en directe est nul, puis il diminue graduellement vers une
valeur ngative A I
ds
10 cette composante ngative agit en inverse par rapport au flux de
laimant ce qui conduit un dfluxage.
Afin dvaluer la robustesse de la commande vectorielle, on a test le comportement
de la rgulation par rapport aux variations des paramtres de la MSAP en faisant varier
linertie, la rsistance statorique et le flux des aimants.
la figure (II.15) montre que les variations de linertie ninflue pas sur la dynamique de
la vitesse, mais on observe des petites variations au niveau de couple lectromangtique
ds
I et
qs
I , lors du dmarrage et linversion de vitesse
la figure (II.16) montre que les variations du flux ninflue pas sur la dynamique de la
vitesse ni le comportement des autres grandeurs.
CHAPI TRE I I Commande Vect or i el l e de l a MSAP
51
la figure (II.17) montre les variations de la rsistance statorique, on remarque que la
di munition de la rsistance se traduit par un temps de rponse plus long. Et laugmentation
par des pics de courant trop important pour la MSAP.
la figure (II.18) montre une variation simultane de tous les paramtres suivant le
tableau (II.1), Les rsultats obtenus montrent une lgre sensibilit de la rgulation par PI
la variation des paramtres mais les performances du systme sont prserves, travers le
rejet de la perturbation et le maintien de la dynamique de poursuite.
Les rsultats de simulation de la commande vectorielle de la MSAP alimente en
courant .la vitesse suit sa consigne et sans dpassement, le courant statorique est nul, le couple
lectromagntique et le courant statorique ont la mme allure ce qui montre que le dcouplage
est parfaitement ralis.
Les variations paramtriques montrent que lalimentation en courant donne des
rsultats plus robustes qualimente en tension.
II.6 Conclusion
Dans ce chapitre on a tudi la commande vectorielle par orientation du champ
applique la MSAP.
Daprs les rsultats obtenus on constate que la commande vectorielle dans le plan de
Park de la MSAP alimente en tension ou en courant donne des performances et de robustesse
remarquable, caractrises par des faible temps de rponse et par une absence de dpassement
de consigne ou oscillations transitoires.
Cette technique de commande a permis dobtenir un dcouplage entre le flux et le
couple, alors la MSAP na plus lieu dtre sous estime devant la MCC excitation spare,
comme lindique la grandeur dans laxe directe du courant.
Le prochain chapitre prsent la rgulation de la vitesse par la commande prdictive
gnralise qui est le sujet de notre mmoire.
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
53
III.1 Introduction
Actuellement, avec les progrs observs dans le domaine des ordinateurs numriques,
il est presque impossible de trouver un secteur de l'activit humaine qui ne soit touch par ce
phnomne.
L'emploi de l'ordinateur dans les processus de commande a permis l'implantation de
techniques compliques et sophistiques qui permettent le dveloppement de stratgies
efficaces tout en restant de cot raisonnable ce qui tait pratiquement impossible denvisager
avec les mcanismes et les dispositifs prcdents. Des exemples de telles techniques incluent
la commande non linaire, la commande multi-variable, la commande robuste et la commande
prdictive [16].
La commande prdictive est ne d'un besoin rel dans le monde industriel. Un besoin
de systmes de rgulation capable de performances plus leves que les contrleurs
classiques, savoir PID, tout en respectant des contraintes de fonctionnement et de
production toujours plus leves.
La commande prdictive est une technique de commande avance de l'automatique.
Elle a pour objectif de commander des systmes industriels complexes. Le principe de cette
technique est d'utiliser un modle dynamique du processus l'intrieur du contrleur en temps
rel afin d'anticiper le futur comportement du procd. La commande prdictive fait partie des
techniques de contrle modle interne (IMC: Internal Model Controller). En anglais on
utilise le terme MPC ou MBPC pour qualifier la commande prdictive, Model (Based)
Predictive Control.
La commande prdictive se diffrencie des autres techniques de commande par le fait
que doit tre rsolu en ligne, elle consiste optimiser, partir des entres/sorties d'un systme
(tat, couples,), le comportement futur prdit du systme considr. La prdiction est faite
partir d'un modle interne du systme sur un intervalle de temps fini appel horizon de
prdiction. La solution du problme d'optimisation est un vecteur de commande dont la
premire entre de la squence optimale est injecte au systme. Le problme est nouveau
rsolu sur l'intervalle de temps suivant en utilisant les donnes du systme mises jour [16].
La commande prdictive est galement appele commande horizon glissant ou
fuyant, en rfrence la manire dont la fentre de temps considre pour les calculs est
dcale chaque itration. Le principal atout de la commande prdictive est sa capacit
prendre en compte dans son expression mme les contraintes fonctionnelles et les contraintes
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
54
d'exploitation du systme considr. L'inconvnient d'une telle mthode est le temps de calcul
surtout lorsque le modle utilis est non linaire. C'est la raison pour laquelle elle a t
essentiellement utilise dans l'industrie du gnie des procds o les systmes contrls sont
suffisamment lents pour en permettre une mise en uvre avec des priodes d'chantillonnage
assez leves [17].
La commande prdictive peut tre utilise pour commander des systmes complexes
comportant plusieurs entres et sorties o le simple rgulateur PID est insuffisant. Cette
technique est particulirement intressante lorsque les systmes possdent des retards
importants, des rponses inverses et de nombreuses perturbations. Les principaux utilisateurs
de la commande prdictive sont les raffineries de ptroles, l'industrie chimique et agro-
alimentaire, la mtallurgie, l'arospatiale... Les principaux avantages de la commande
prdictive sont les suivants [16], [18], [19], [20] :
On peut dvelopper la stratgie de commande en utilisant une connaissance limite sur
le processus commander et sans quun type bien prcis de modle soit impos.
La prise en compte des retards fait partie de lapproche et permet de respecter les
contraintes sur les variables contrles et manipules.
Evite des variations excessives sur les variables manipules, la commande est plus
douce. Cela permet une meilleure utilisation des actionneurs (vrins, vannes, moteurs)
et leur temps de vie est ainsi augment.
Lorsque les signaux et les actionneurs dfaillants, commander une aussi grande partie
du procd que possible.
En cas de perturbations mesurables, le systme s'adapte automatiquement.
Les cas multi-variables peuvent tre traits assez facilement.
Cette approche est trs utile lorsque les signaux de rfrence sont connus et permet en
gnral un rel gain financier.
La mise uvre de la loi de commande est simple et le temps de calcul nest pas
prohibitif.
Dans ce chapitre nous prsentons la stratgie et un rsum historique de la commande
prdictive, puis nous exposons la description et lanalyse thorique de lalgorithme GPC, en
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
55
plus la commande prdictive gnralise cascade est tudi afin damliorer les performances
de cette la GPC.
Finalement, une dmonstration des rsultats de simulation indiquant les performances du
rgulateur GPC applique la MSAP est prsente dans la dernire partie.
III.2 Stratgie gnrale de la commande prdictive
De manire gnrale, la loi de commande prdictive est obtenue partir de la
mthodologie suivante :
1- Prdire les sorties futures du processus sur lhorizon de prdiction dfini, en utilisant
le modle de prdiction. On dnote ) / ( t k t y + , N k ....... 0 , les sorties prdites et
par N lhorizon de prdiction. Ces sorties sont dpendantes des valeurs de sorties et
dentres du processus commander connues jusquau temps t.
2- Calculer la squence de signaux de commande, dnote par ) / ( t k t u + , 1 ..... 0 N k ,
en minimisant un critre de performance afin de mener la sortie du processus vers une
sortie de rfrence. On dnote par ) / ( t k t w + N k ....... 0 , dhabitude le critre de
performance minimiser est un compromis entre une fonction quadratique des erreurs
entre ) / ( t k t y + et ) / ( t k t w + et un cot de leffort de commande. Par ailleurs, la
minimisation dune telle fonction peut tre soumise des contraintes sur ltat et plus
gnralement des contraintes sur la commande.
3- Le signal de commande ) / ( t t u est envoy au processus tandis que les autres signaux
de commande sont oublis. Au temps 1 + t on acquiert la sortie relle ) 1 ( + t y et on
recommence au premier [16], [18], [19], [20].
La figure (III.1) illustre cette mthodologie et sa mise en uvre utilise la structure de
base montre dans la figure (III.2). Les deux boucles fondamentales remarquer sur cette
figure sont le modle et loptimiseur. Le modle doit tre capable de capture la dynamique du
processus, de prdire les sorties futures de manire prcise et sa mise en uvre doit tre
facile, loptimiseur fournir les actions de commande. En prsence de contrainte, la solution est
obtenue via des algorithmes itratifs, avec plus de temps de calcul, videmment [18].
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
56
u(t+k/t)
u(t)
y(t+k/t)
w(t+k)
w(t)
y(t N
t-1 t t+1 .. t+i t+N
Fig. (III.1) : La mthodologie du MPC
Trajectoire de
Entre et sortie Sortie de rfrence
pases prdiction +
-
Entre Erreur de
futur prdiction
Fonction objective Contraintes
Fig. (III.2) : Le schma fonctionnel de la structure de base des algorithmes MPC
Modle
prdicteur
Optimisation
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
57
III.3 Rsum historique de la commande prdictive
La fin de la dcennie 70 t marque par un intrt pour le MPC et surtout dans ses
dveloppements industriels. En Europe, on peut citer les travaux de Richalet et al. (1976),
(1978), o il est formul le problme de la commande heuristique prdictive base sur le
modle (MPHC : Model Prdictive Heuristic Control) qui ft connue plus tard sous le nom de
commande algorithmique (MAC : Model Algorithmic Control). Aux Etats-Unis, Cutler et
Ramaker (1980), ont dvelopp ce qui sera connu, plus tard, comme Matricielle Dynamique
(DMC : Dynamic Matrix Control). Dans ces approches, l'objectif est de poursuivre une
rfrence mais les contraintes ne sont pas prises en compte, Un modle dynamique du
processus est utilis dans les deux contributions (la rponse impulsionnelle dans la premire
et la rponse indicielle dans la seconde) en vu de quantifier l'effet des actions de commande
sur la sortie, les commandes sont calcules pour minimiser l'erreur prdite sous restrictions
d'excution (fonction objectif). L'optimisation est rpte chaque priode dchantillonnage,
sappuyant aussi sur les donnes mesures sur le processus. Ces algorithmes ont permis de
dfinir l'essence mme des stratgies prdictives et les applications nombreuses dans le milieu
industriel ont assure leur prennit [16], [17].
En mme temps et indpendamment, certains groupes europens de recherche
acadmique ont commenc dvelopper des travaux bass sur les ides du prdictif pour des
modles formuls partir dune reprsentation entre-sortie du systme (fonction transfert).
La commande auto adaptative prdictive tendue dveloppe par de De Keyser et Van
Cauwenberghe (1979) (le EPSAC : Extended Prediction Self Adaptive Control) propose un
signal de commande constant pour tout l'horizon de prdiction, et qui est appliqu ds le dbut
du calcul de la commande qui optimise le critre de cot choisi. Dans la commande adaptative
horizon tendu de Ydstie (1984), (le EHAC : Extended Horizon Adaptive Control ), l'ide
fondamentale consiste calculer chaque instant la squence des signaux de commande pour
essayer de maintenir la sortie future la plus proche possible de la consigne pour un horizon de
temps plus grand que le retard prsent sur le processus. La commande prdictive gnralise
par Clarke, Mohtadi et Tuffs (1987), (le GPC : Generalized Predictive Control), est en ce
moment, la mthode la plus populaire. Cette mthode permet la prise en compte des
contraintes sur les entres et les sorties en posant un problme doptimisation quadratique.
Aprs ces travaux pilotes, l'intrt pour le MPC a augment graduellement depuis les
annes 80, et d'autres mthodologies partageant les mmes ides sont apparues dans la
littrature spcialise de la commande. Entre autres, peuvent tre mentionnes, (MUSMAR :
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
58
Multi Step Multivariable Adaptive Control), Greco et al (1984) (MURHAC : Multipredictor
Receding Horizon Adaptive Control), Lemos et Mosca (1985) (PFC : Predictive Functional
Control), (UPC : Unified Predictive Control), Seterboek (1992) [16], [17], [19].
Malgr le dveloppement tendu qua connu le MPC pendant la fin de la dcennie 70
et celle de 80, ce n'est qu'au dbut des annes 90 qu'on commence se proccuper de l'tude
de la stabilit et de la robustesse en MPC.
Le MPC peut aussi tre formul dans le contexte de la reprsentation en variables
d'tat Morari (1994). Ceci permet non seulement de faire usage de thormes et rsultats
existant dans la thorie d'espace d'tat, mais aussi facilite l'extension de la thorie MPC des
cas plus complexes comme ceux des systmes avec perturbations stochastiques, bruits sur les
variables de mesure ou commande multivariable.
tant donn la charge leve de calcul qu'exigent les algorithmes de programmation
quadratique dans la stratgie MPC, beaucoup d'auteurs commencent tudier la possibilit
d'obtenir une solution rapide fournissant un rsultat le plus souvent sous-optimal dans le
problme d'optimisation. Dans cette catgorie on peut mentionner les travaux de Bemporad et
al. (2002), Ramirez et Camacho (2001) [16].
III.4 Commande prdictive gnralise
La commande prdictive gnralise (GPC Generalized Predictive Control) de Clarke,
Mohtadi et Tuffs [19] est considr comme tant la plus populaire des mthodes de
prdiction, particulirement pour les processus industriels. Elle combine la prdiction du
comportement futur du procd avec la commande de rtroaction.
III.4.1 Principe de fonctionnement de la GPC
La commande prdictive cest la rsolution rpte chaque pas de temps dun
problme de commande optimale : "comment aller de letat actuel `a un objectif de manire
optimale en satisfaisant des contraintes".
Pour cela il faut connaitre chaque itration letat du systme et utiliser un outil de
rsolution numrique [21] [22].
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
59
Partie numrique
) (k w
) (t u
) (t y ) (k y
) (
~
k y
Calculateur
Modle
Systme CN
A
CN
A
) (k u
Le schma de principe de la commande prdictive gnralise est donn par la figure
suivante :
Fig. (III.3) : Principe de fonctionnement de la commande prdictive gnralise [20].
III.4.2 Formulation du modle
La philosophie de la Commande Prdictive Gnralise est fonde sur quatre grandes
ides reproduisant les mcanismes dcisionnels de base du comportement humain : cration
dun effet anticipatif par exploitation de la trajectoire suivre dans le futur, dfinition dun
modle numrique de prdiction, minimisation dun critre quadratique `a horizon fini,
principe de lhorizon fuyant. On considre alors les points suivants :
Le modle du processus peut prendre diffrentes reprsentations (par fonction de
transfert, par variables detat, rponse impulsionelle...), la structure adopte ici est la forme
CARMA [19]:
) ( ) 1 ( ) ( ) ( ) (
1 1
t e t u z B z t y z A
d
+
(III.1)
O ) (t u et ) (t y sont respectivement lentre de commande et la variable mesure de la
sortie et ) (t e est un signal moyenne variable.
d reprsente le nombre dchantillonnage contenu dans le retard.
Aet B sont des polynmes en fonction de loprateur de dcalage arrire ) (
1
z tels que :
na
na
z a z a z a z A
+ + + + ... 1 ) (
2
2
1
1
1
(III.2)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
60
nb
nb
z b z b z b b z B
+ + + + ... ) (
2
2
1
1 0
1
(III.3)
Ou :
na Reprsente le degr du polynme A.
nb Reprsente le degr du polynme B.
Le modle dcrit par lquation (III.1) reprsente le modle CARMA (Control Auto
Regressive on Moving Average) ; plusieurs thories dautorglage sont bases sur ce modle.
Mais, il semble dtre non appropri pour quelques applications industrielles dans lesquelles
les perturbations sont non stationnaires.
Pratiquement deux types de perturbations principales sont mis en considration :
Perturbation pas alatoire en temps alatoire qui se produit dans le cas de
changement de la matire, ou la qualit du matriel.
Perturbation en sens de Brown qui se trouve dans le cas dun dsquilibre nergtique.
Pour ces deux types de perturbation le modle appropri est :
) (
) ( ) (
1
t
z C t e
(III.4)
Avec :
nc
nc
z c z c z c z C
+ + + + ... 1 ) (
2
2
1
1
1
(III.5)
) (
1
z C : est un polynme stable dordre ( nc).
) (t : est une squence alatoire non corrle reprsente un bruit blanc de moyenne nulle.
1
1
z (III.6)
Ou est un oprateur de diffrentiation.
En combinant lquation (III.1) avec (III.5) on obtient :
+
) (
) ( ) 1 ( ) ( ) ( ) (
1 1 1
t
z C t u z z B t y z A
d
(III.7)
Ce dernier reprsente le modle CARIMA, ce modle t utilise par Tuff et
Clark en 1985 pour le dveloppement des stratgies du contrle prdictif un pas en avant.
Lutilisation de ce modle (avec lintroduction dun intgrateur dans le systme de contrle)
permet davoir deux avantages essentiels :
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
61
Lamlioration de la qualit didentification des paramtres de modle de processus
contrler.
Leffet dliminer linfluence des oscillations (offset libre) de perturbation non
dsires.
III.4.3 Dveloppement de prdicteur
Pour la simplicit au cours de dveloppement ) (
1
z C est choisis comme tant gale
1, on obtient le modle [19]:
j d
z z E
t e
t u z z B t y z A ) ( ]
) (
) 1 ( ) ( ) ( ) ( [
1 1 1
+ (III.8)
Pour driver le prdicteur j-pas en avant, on considre lidentit
) ( ) (
~
) ( 1
1 1 1
+ z F z z A z E
j
j
(III.9)
Avec
) ( ) (
~
1 1
z A z A (III.10)
) (
1
z E
j
: est un polynme dordre ) 1 ( j
) (
1
z F : est un polynme dordre ) (na
On multipliant lquation (III.8) par le terme
j
z z E ) (
1
on obtient :
) ( ) ( ) 1 ( ) ( ) ( ) ( ) ( ) (
~
1 1 1 1 1
j t e z E d j t u z B z E j t y z E z A
j j j
+ + + +
(III.11)
En utilisant lidentit de Diophantine (III.9) on obtient :
) ( ) ( ) 1 ( ) ( ) ( ) ( )) ( 1 (
1 1 1 1
j t e z E d j t u z B z E j t y z F z
j j j
j
+ + + +
(III.12)
On dduit donc lquation de sortie ) 1 ( + t y
) ( ) ( ) 1 ( ) ( ) ( ) ( ) ( ) (
1 1 1 1
j t e z E d j t u z B z E t y z F j t y
j j j
+ + + + +
(III.13)
Comme ) (
1
z E
j
est de degr le produit e(t) z E
j
) (
1
est nul, se qui prouve la
robustesse de lalgorithme dont les composantes du bruit sont toutes nulles dans le future, ce
qui rend ce type de prdicteur optimal et robuste, do le modle prdicteur est comme suit :
) 1 ( j
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
62
) ( ) 1 ( ) ( ) / (
~ 1
j t f d j t u z G t j t y
j j
+ + + +
(III.14)
Avec :
) 2 ( ) 1 ( ) 1 ( + + + d j t u d j t u d j t u Pour
u
N j 1 (III.15)
) ( ) ( ) (
1 1 1
z B z E z G
j j
(III.16)
) ( ) ( ) (
1
t y z F j t f
j j
+ Pour
2
.... 1 N j (III.17)
na
na j j j j
z f z f f z F
+ + +
,
1
1 , 0 ,
1
... ) ( (III.18)
) 1 (
) 1 ( ,
1
0 , 0 ,
1
... ) (
+ + +
j
j j j j j
z e z e e z E (III.19)
Donc la prdiction longue horizon se fait par le calcul rcursif du polynme ) (
1
z G
j
et de
la fonction ) ( j t f
j
+ .
Pour calculer ) ( ) ( ) (
1
1
1 1
1
+
+
z B z E z G
j j
et y(t) z F j t f
j j
) ( ) (
1
1 1
+ +
+ on procde de
la rcursivit de lquation de Diophantienne utilise prcdemment.
III.4.4 Rsolution des quations Diophantiennes
On peut avoir ) (
1
1
+
z E
j
et ) 1 (
1
+
+
t F
j
partir de ) (
1
z E
j
et ) (
1
z F
j
et ainsi de
suite [3], [19].
) ( ) (
~
) ( 1
1
1
1 1 1
1
+
+
+ z F z z A z E
j
j
j
(III.20)
En faisant retrancher (III.9) de (III.20) on obtient :
0 )) ( ) ( ) (
~
)) ( ) ( (
1 1
1
1 1 1 1
1
+
+
+
z F z F z ( z z A z E - z E
j j
j
j j
(III.21)
Etant donn que les polynmes ) (
1
z A et
1
z sont premier entre eux, il est permis dcrire
1 1 1
1
) ( ) (
+
z r z E - z E
j j j
(III.22)
En remplaant dans lexpression (III.21) on obtient :
0 )) (
~
) ( ) ( (
1 1 1
1
1
+
+
z A r z F z F z z
j j j
j
(III.23)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
63
)) (
~
) ( ) (
1 1 1
1
+
z A r z F ( z z F
j j j
(III.24)
Sachant que
na
n j j j j
z f z f f z F
+
+ +
+
+ + + ... ) (
a , 1
1
1 , 1 0 , 1
1
1
(III.25)
) 1 (
1
2
2
1
1 0
1
... ) (
~
+
+
+ + + +
na
na
z z z z A (III.26)
Avec
1
0
1
i i i
a a
na na
a
+1
Avec na i ,..., 1 , 0
Aprs identification dans (III.23), on obtient les relations rcurrentes suivantes :
0 ,
1
j j
f z r
(III.27)
j i i j i j
r f f
1 , 1 , 1 + + +
(III.28)
Avec na i ,..., 1 , 0
j 1 na , 1
r
+ +
na j
f
Ces relations dterminent le polynme ) (
1
1
+
z F
j
, et nous retrouvons partir de (III.22)
1 1 1
1
) ( ) (
+
+ z r z E z E
j j j
(III.29)
Linitialisation des itrations de calcul se fait en supposant pour 1 j , 1
1
E . On
considrant un nombre de prdictions pour lesquelles j varie dune valeur minimale une
valeur maximale ce qui introduit la notion de lhorizon de prdiction fuyant qui sera limit
par
2
N indiqu avant et qui reprsente la limite maximale de lhorizon de prdiction ou
2
N j N
u
, et
u
N doit tre suprieur ou gal au temps de retard du processus, pour
assurer que la sortie soit affecte par la premire squence de contrle ) (t u , avec la
supposition que les contrles sont performs en boucle ouverte do les composantes du bruit
sont ignors en calculant les prdictions ) (
~
j t y + .
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
64
Pour simplicit, on prend 1
1
N et N N
2
De lquation (III.14) on obtient :
'
+ + + +
+ + + +
+ + +
+ +
+ +
+ +
) ( ) 1 ( ) / 1 (
~
.
.
.
) ( ) 1 ( ) / 1 (
~
) ( ) ( ) / 1 (
~
2 2
1 1
t y F N t u G t d t y
t y F t u G t d t y
t y F t u G t d t y
N d N d
d d
d d
(III.30)
Le modle prdicteur rsultant sexprime en criture vectorielle comme suit
f u G y +
~
(III.31)
Avec
T
N t y t y t y y ] ) (
~
. . ) 2 (
~
) 1 (
~
[
~
2
+ + +
j [
T
N t u t u t u u ) 1 ( . . ) 1 ( ) (
2
+ +
T
N t f t f t f f ] ) ( . . ) 2 ( ) 1 ( [
2
+ + +
La matrice G est triangulaire infrieure ) ( N N
1
1
1
1
1
1
]
1
0 2 1
0
0
. . . .
. . . . . . .
. . . . . . .
0 . . . . .
0 . . . . 0
g g g
g
g
G
N N
j j i
g g Pour i j ,.... 1 , 0
0
j i
g Pour i j >
III.4.5 Critre doptimisation
Une fois les prdictions faites, on doit trouver la future squence de commande
appliquer sur le systme pour atteindre la consigne dsire en suivant la trajectoire de
rfrence. Pour cela, on vient minimiser une fonction de cot qui diffre selon les mthodes
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
65
mais gnralement cette fonction contient les erreurs quadratiques entre la trajectoire de
rfrence et les prdictions sur lhorizon de prdiction ainsi que la variation de la commande.
Cette fonction de cot est la suivante :
2
1
2
, 2 1
)] 1 ( )[ ( )] ( ) / (
~
[ ) , (
2
1
+ + + +
j t u j j t w t j t y N N N J
u
N
j
N
N j
u
(III.32)
Avec
0 ) ( + j t u Pour
u
N j
) / (
~
t j t y + : Sortie prdite linstant ) ( j t + .
) ( j t w + : Consigne ou trajectoire de rfrence linstant ) ( j t + .
) 1 ( + j t u : Incrment de commande linstant ) 1 ( + j t .
) ( j : Coefficient de pondration du signal de commande.
1
N : Horizon minimal de prdiction.
2
N : Horizon maximal de prdiction.
u
N : Horizon de prdiction sur la commande.
La minimisation analytique de cette fonction fournit la squence de commandes
futures dont seule la premire sera effectivement applique sur le systme. La procdure tant
itre de nouveau la priode dchantillonnage suivante selon le principe de lhorizon
glissant.
Lexpression du critre appelle plusieurs remarques :
Si lon dispose effectivement des valeurs de la consigne dans le futur, on utilise toutes
ces informations entre les horizons
1
N et
2
N de faon faire converger la sortie
prdite vers cette consigne.
On trouve laspect incrmental du systme en considrant u dans le critre.
Le coefficient permet de donner plus ou moins de poids la commande par
rapport la sortie, de faon assurer la convergence lorsque le systme de dpart
prsente un risque dinstabilit [20].
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
66
Le critre prcdemment introduit sous forme analytique (III.32) peut galement
crire sous forme matricielle comme :
u u w f Gu w f Gu J
T T
) ( ) ( + + + (III.33)
Avec
j [
T
N t w t w t w w ) ( . . ) 2 ( ) 1 ( + + +
La solution optimale est ensuite obtenue par drivation de (III.33) par rapport au vecteur des
incrments de commande :
u u w f u G w f G u J
T T T T ~ ~
)] (
~
[( ] ) (
~
[ + + + (III.34)
) ( ) (
~
) ( ) (
~ ~
] [
~
w f w f u G w f w f G u u I G G u J
T T T T T T
+ + + + (III.35)
0 ) ( 2
~
] [ 2
~
+ +
w f G u I G G
u
J
T T
(III.36)
Soit la solution optimale :
) ( ) (
1
w f G I G G u
T T
opt
+
(III.37)
Ainsi seulement G et f sont ncessaires pour dterminer le vecteur des incrments contrle
optimal appliquer, dont ) (t u
opt
qui reprsente le premier lment du vecteur qui sera
confirm appliquer lentre du processus command ;
) ( ) (
1
f w K t u
opt
(III.38)
Avec
1
K reprsente la premire ligne de la matrice dynamique de control K
T T
G I G G K
1
1
) (
+ (III.39)
La squence de contrle futur prdite sera :
) ( ) 1 ( ) (
~
1
f w K t u t u + (III.40)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
67
GPC 1
GPC 2
Systme
interne
Systme
externe
1
y
u
2
w
1
w
2
y
III.5 Commande prdictive gnralise en cascade
La commande prdictive gnralise cascade t mise au point pour essayer de
combiner les avantages de la commande prdictive, savoir possibilit de cre un effet
danticipation, ceux dune structure cascade, trs utilise pour amliore notamment la
rjection des perturbations dans les boucles internes. Grace cette structure, plusieurs
variables pourront tre commandes en mme temps.
Pour simplifier la prsentation, on envisagera ici quune structure deux boucles,
corriges chacune par un algorithme de commande prdictive, on supposant que lon ait pu au
pralable dcomposer le systme en deus sous-systmes nots respectivement systme
interne et systme externe [20]
Le schma de principe de la commande prdictive gnralise cascade est donn par la
figure suivante :
Boucle interne
Boucle externe
Fig. (III.4) : Structure dune commande prdictive gnralise cascade.
Sur la figure (IV.1), on voit apparaitre immdiatement quil est impossible de dfinir un
modle de reprsentation entre la sortie
2
w du GPC1 et la sortie
1
y car ce modle savre tre
fonction de GPC2. Les seuls modles disponibles seront donc ceux correspondant aux deux
sous-systmes [20].
Avec
1
w : Consigne du systme global
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
68
2
w : Consigne du systme interne ou consigne interne
u : Commande applique sur lensemble du systme
1
y : Sortie du systme global
2
y : Sortie du systme interne
III.5.1 Dfinition des modles
Modle interne [20].
) ( ) ( ) ( ) (
1
2
1
2
1
2
t u z B z t y z A
(III.41)
Modle externe
) ( ) ( ) ( ) (
2
1
1
1
1
1
1
t y z B z t y z A
(III.42)
Modle globale
) ( ) ( ) ( ) (
1 1
1
1
t u z B z t y z A
(III.43)
Avec
) ( ) ( ) (
1
2
1
1
1
z A z A z A (III.44)
) ( ) ( ) (
1
2
1
1
1
z B z B z B (III.45)
1
1
2
12
1
11
1
1
... 1 ) (
na
na
z a z a z a z A
+ + + +
2
2
2
22
1
21
1
2
... 1 ) (
na
na
z a z a z a z A
+ + + +
1
1
2
12
1
11 01
1
1
... ) (
nb
nb
z b z b z b b z B
+ + + +
2
2
2
22
1
21 02
1
2
... ) (
nb
nb
z b z b z b b z B
+ + + +
III.5.2 Expression des critres
La philosophie reste la mme que celle du GPC de base, mais il faudra ici minimiser
deux boucle de cout
1 GPC
J et
2 GPC
J
Daprs les quations (III.32), (III.33) et (III.38) les expressions de la boucle externe
et de la boucle interne ont pour expression :
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
69
2
1 1
21
11
1 21 11 1
)] / (
~
) ( [ ) , , ( t j t y j t w N N N J
N
N j
u GPC
+ +
2
2
1
11
1
)] 1 ( [ + +
j t w
u
N
j
(III.46)
2
2 2
22
12
2 22 12 2
)] / (
~
) ( [ ) , , ( t j t y j t w N N N J
opt
N
N j
u GPC
+ +
2
2
12
2
)] 1 ( [ + +
j t u
u
N
j
(III.47)
Avec
j [
T
N t y N t y N t y y ) (
~
. . ) 1 (
~
) (
~ ~
21 1 11 1 11 1 1
+ + + +
j [
T
N t y N t y N t y y ) (
~
. . ) 1 (
~
) (
~ ~
22 2 12 2 12 2 2
+ + + +
j [
T
u
N t u t u t u u ) 1 ( . . ) 1 ( ) (
~
2
+ +
j [
T
N t w N t w N t w w ) ( . . ) 1 ( ) (
21 1 11 1 11 1 1
+ + + +
j [
T
N t w N t w N t w w ) ( . . ) 1 ( ) (
21 2 11 2 11 2 2
+ + + +
1
~
y : Sortie future du systme externe
2
~
y : Sortie future du systme interne
2
w : Les incrments calculs de la consigne interne future.
Le rsultat de la minimisation du critre externe fournit la squence optimise de la consigne
interne
opt 2
. Cette squence est ensuite directement rutilise au niveau de la minimisation
interne pour laborer la commande applique sur le processus
opt
u .
III.5.3 Rsolution de GPC cascade
La dmarche conduisant llaboration de la commande est tout fait semblable ce
qui a dj t vu, mais ici en double exemplaire.
A laide des dfinitions vectorielles prcdentes, il est possible dcrire les deux quations de
prdiction sous forme matricielle :
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
70
1 2 1 1
~ ~
f w G y + (III.48)
2 2 2
~ ~
f u G y + (III.49)
Avec
j [
T
u
N t w t w t w w ) 1 ( . . ) 1 ( ) (
~
1 2 2 2 2
+ +
j [
T
N N N
f f f f
21
1 1
11
1
11
1 1
. .
+
j [
T
N N N
f f f f
22
2 1
12
2
12
2 2
. .
+
Ou
1
G et
2
G sont les matrices de rgime indiciel des deux sous systme.
Les critres prcdemment introduisent sous forme analytique (III.46) et (III.47) peuvent
galement crire sous forme matricielle comme :
2 2 1 1 1 2 1 1 1 2 1 1
~ ~
)
~
( )
~
( w w w f w G w f w G J
T T
+ + + (III.50)
u u w f u G w f u G J
T T ~ ~
)
~
( )
~
(
2 2 2 2 2 2 2 2
+ (III.51)
La solution optimal est enfin obtenue en minimisant dans un premier temps
1
J puis avec ce
rsultat, la minimisation de
2
J fournit la commande applique sur le systme
0
~
2
1
GPC
J
(III.52)
) ( ) (
~
1 1 1
1
1
1 1 1 2 1
f w G I G G w J
T
u
N
T
opt
+
(III.53)
0
~
2
u
J
GPC
(III.54)
)
~
( ) (
~
2 2 2
1
2 2 2 2
2
f w G I G G u J
opt
T
N
T
opt
u
+
(III.55)
A partir de la squence de commande obtenue, il faut bien sur extraire la seule commande
retenue
1
) 1 ( ) ( M t u t u
opt opt
+ (III.56)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
71
Avec
1
M reprsente la premire ligne de la matrice dynamique de control M
)
~
( ) (
2 2 2
1
2 2 2
2
f w G I G G M
opt
T
N
T
u
+
(III.57)
III.6 Choix des paramtres de rglage du GPC
Lhorizon minimal de sortie
Si le temps mort d du procd est connu exactement,
1
N prend cette valeur. Mais quand d est
non connu ou variable
1
N prend la valeur 1
Lhorizon maximal de sortie
Une valeur plus grande de
2
N est suggre correspond au temps de monte du procd.
Lhorizon de commande
Cest un paramtre de conception et de rglage important, une variable de 1
u
N donne un
contrle gnralement acceptable pour les processus simple et stable en boucle ouverte.
Laugmentation de
u
N rend le control et la sortie correspondante plus active jusqu ce
quune tape soit atteinte ou toute augmentation supplmentaire de
u
N na aucune influence.
Pour un systme instable, le bon control est raliser quand
u
N est ou moins gal au nombre
des ples instables. Pour les hautes performances, une valeur plus grande de
u
N est
souhaitable.
Lutilisation de
2
N N
u
< est plus significative, permet de rduire la taille de la
matrice ) ( I G G
T
+ qui sera de taille
u u
N N au lieu de
y y
N N qui conduit minimiser
la puissance ncessaire pour la procdure de calcule des prdictions et des commandes.
Facteur de pondration
Les constatations faites par Dumur montrent quil est judicieux de choisir ce facteur au
voisinage de ) ( G G tr
T
opt
.
G tant la matrice forme des coefficients de la rponse indicielle.
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
72
III.7 Rsultats de simulation
III.7 1 Rsultats de simulation de la GPC :
Nous avons appliqu le rgulateur GPC la commande de la vitesse. La fonction de
transfert couple vitesse issue de lquation mcanique peut tre reprsente dans le plan
continu par le transfert suivant :
f Js s Ce
s
s F
+
1
) (
) (
) ( (III.41)
La discrtisation de la fonction de transfert (III.41) donne
1
1
1
1 0 1
1
1
1 ) (
) (
+
+
z a
z b b
z
z Ce
z
(III.42)
u
La figure (II.5) reprsente le schma bloc dune rgulation de vitesse de la MSAP par un
rgulateur de type GPC, et les courants par des rgulateurs de type PI.
Fig. (III.5) : Schma bloc de rglage de la MSAP par la GPC
MSAP
0
-
-
+
+
qs
I
PREDICTEUR
GPC PI
PI
j
e
Boucles
de
courant
Conver-
tisseur
statique
cos
sin
) (k
b
I
) (
~
k
ds
I
3
2
ref
a
I
c
I
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
73
Pour illustrer les performances de la GPC applique au rglage de la vitesse de la
MSAP, on a simul comme prcdemment, un dmarrage vide avec application de la charge
(10N.m) t=0.4s, puis le moteur soumis un changement de consigne de vitesse de 100rd/s
-100rd/s, nous avons test la robustesse et linfluence du facteur de pondration sur les
grandeurs de la MSAP.
Les rsultats de simulation obtenus avec les paramtres de rglage suivants :
1
1
N ; 10
2
N ; 3
u
N ; 8 . 0
;
ms T
e
2
e
T est priode dchantillonnage
Fig. (III.6) : Rsultats de simulation lors dun dmarrage vide pour une consigne de vitesse
de 100rd/s.
0 0. 2 0.4 0. 6 0.8 1
0
20
40
60
80
100
120
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-10
-5
0
5
10
15
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-4
-2
0
2
4
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-20
-10
0
10
20
30
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
74
Fig. (III. 7) : Rsultats de simulation lors dun dmarrage en charge t=0.4s pour une
consigne de vitesse de 100rd/s
Fig. (III. 8) : Rsultats de simulation lors dun dmarrage en charge t=0.4s pour une
consigne de vitesse de 100rd/s avec linversion de la consigne (-100rd/s)
0 0.2 0.4 0. 6 0.8 1
0
20
40
60
80
100
120
temsp (s)
v
i
t
e
s
s
e
(
r
s
/
s
)
0 0. 2 0.4 0.6 0. 8 1
-10
-5
0
5
10
15
20
t ems p (s )
c
o
u
p
l
e
(
N
.
m
)
0 0.2 0.4 0. 6 0.8 1
-5
0
5
10
15
temsp (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0.6 0. 8 1
-10
0
10
20
30
40
t ems p (s )
c
o
u
r
a
n
t
i
s
q
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-20
-10
0
10
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-15
-10
-5
0
5
10
15
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
75
Fig. (III.9): Rsultats de simulation lors dun dmarrage vide et inversion de la consigne de
vitesse -100rd/s en mode dflux
Fig. (III.10) : Rsultats de simulation lors dun dmarrage en charge t=0.4s et inversion de
la consigne de vitesse -100rd/s en mode dflux.
0 0.2 0.4 0. 6 0.8 1
-100
0
100
200
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0.6 0. 8 1
-30
-20
-10
0
10
20
t emps (s )
c
o
u
p
l
e
(
N
.
m
)
0 0.2 0.4 0. 6 0.8 1
-40
-30
-20
-10
0
10
20
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0.6 0. 8 1
-50
0
50
t emps (s )
c
o
u
r
a
n
t
i
s
q
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-100
0
100
200
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 2 0.4 0. 6 0.8 1
-40
-30
-20
-10
0
10
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 2 0.4 0. 6 0.8 1
-40
-30
-20
-10
0
10
20
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 2 0.4 0. 6 0.8 1
-60
-40
-20
0
20
40
60
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
76
Fig. (III. 11) : Rsultats de simulation lors des variations de linertie J
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0. 8 0.9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariat ion)
sortie (+100% de J)
sortie (+50% de J)
sort ie (-50% de J)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
0
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
-10
0
10
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
77
Fig. (III. 12) : Rsultats de simulation lors des variations du flux
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariation)
sort ie (0. 8*Fie)
sort ie (1. 1*Fie)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0. 8 0.9 1
-20
0
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0. 8 0.9 1
-20
-10
0
10
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0. 8 0.9 1
0
10
20
30
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
78
Fig. (III. 13) : Rsultats de simulation lors des variations de la rsistance R
S
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariation)
sortie (+100 de Rs)
sort ie (-50 de Rs)
sortie (+50 de Rs )
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
0
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
-10
0
10
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
79
Fig. (III. 14) : Rsultats de simulation lors des variations simultanes des paramtres de la
MSAP suivant le tableau (II.1)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
a
b
c
d
e
f
g
h
i
j
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
40
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-100
-50
0
50
100
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
80
Fig. (III.15) : Rsultats de simulation lors de la variation de facteur de pondration
(diminution)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariation)
sorite (lamda*10
-
1)
sorite (lamda*10
-
2)
sorite (lamda*10
-
3)
sorite (lamda*10
-
4)
sorite (lamda*10
-
5)
sorite (lamda*10
-
6)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
0
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
-10
0
10
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
81
Fig. (III.16) : Rsultats de simulation lors de la variation de facteur de pondration
(augmentation)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-300
-200
-100
0
100
200
300
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariation)
sort ie (lamda*10)
sort ie (lamda*10
2
)
sort ie (lamda*10
3
)
sort ie (lamda*10
4
)
sort ie (lamda*10
5
)
sort ie (lamda*10
6
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
0
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-10
0
10
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
82
Fig. (III.17) : Rsultats de simulation lors de la variation de facteur de pondration 0
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-150
-100
-50
0
50
100
150
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
cons igne
sort ie (sans v ariation)
sort ie (lamda=0)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
0
20
temsp (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-20
0
20
temsp (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0.1 0. 2 0.3 0.4 0. 5 0. 6 0.7 0.8 0. 9 1
-40
-20
0
20
40
temsp (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
83
III.7 2 Rsultats de simulation de la GPC cascade
Nous avons appliqu le rgulateur GPCC la commande de la vitesse et de la position
de la MSAP.
La fonction de transfert vitesse-position prsente le modle externe est donne par :
1
1
1
1
2 ) (
) (
z
z T
t
t
e
(III.43)
Les rsultats de simulation obtenus avec les paramtres de rglage suivants :
Pour la boucle interne de vitesse :
1
11
N ; 10
12
N ; 3
1
u
N ; 004 . 0
1
.
Pour la boucle interne de vitesse :
1
12
N ; 10
22
N ; 3
2
u
N ; 8 . 0
2
.
Fig. (III.18) : Schma bloc de rglage de la MSAP par la GPC cascade
MSAP
0
-
-
+
+
qs
I
PREDICTEUR
GPC
PI
PI
j
e
Boucles
de
courant
Conver-
tisseur
statique
cos
sin
) (k
b
I
) (
~
k
ds
I
3
2
ref
a
I
c
I
GPC
PREDICTEUR
) (k
) (
~
k
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
84
Fig. (III.19) : Rsultats de simulation lors dun dmarrage vide pour une consigne de
position de .
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1. 6 1.8 2
-1
-0. 5
0
0.5
1
1.5
2
2.5
3
3.5
t emps (s)
p
o
s
i
t
i
o
n
(
r
d
)
0 0.5 1 1.5 2
-30
-20
-10
0
10
20
30
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1. 5 2
-2
-1
0
1
2
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.5 1 1.5 2
-0. 25
-0. 2
-0. 15
-0. 1
-0. 05
0
0.05
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1. 5 2
-3
-2
-1
0
1
2
3
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
85
Fig. (III.20) : Rsultats de simulation lors dun dmarrage vide et introduction de la charge
t=0.5s pour une consigne de position de .
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1. 6 1.8 2
-1
-0. 5
0
0.5
1
1.5
2
2.5
3
3.5
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0.5 1 1.5 2
-30
-20
-10
0
10
20
30
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1. 5 2
-5
0
5
10
15
20
t emps (s)
c
o
u
p
l
e
N
.
m
)
0 0.5 1 1.5 2
-0. 6
-0. 4
-0. 2
0
0.2
0.4
0.6
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1. 5 2
-10
0
10
20
30
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
86
Fig. (III.21) : Rsultats de simulation de la MSAP lors dun dmarrage en charge t=0.5s
pour une consigne de position de avec inversion de consigne
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1. 6 1.8 2
-4
-3
-2
-1
0
1
2
3
4
t emps (s)
p
o
s
i
t
i
o
n
(
r
d
)
0 0.5 1 1.5 2
-60
-40
-20
0
20
40
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1. 5 2
-5
0
5
10
15
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.5 1 1.5 2
-1
-0. 5
0
0.5
1
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1. 5 2
-10
0
10
20
30
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
87
Fig. (III. 22) : Rsultats de simulation lors des variations de linertie J
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1. 6 1.8 2
-3
-2
-1
0
1
2
3
t emps (s)
p
o
s
i
t
i
o
n
(
r
d
)
consigne
sort ie (J)
sort ie (+100%)
sort ie (-50%)
sort ie (+50%)
0 0. 5 1 1.5 2
-60
-40
-20
0
20
40
60
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1.5 2
-10
0
10
20
30
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 5 1 1.5 2
-6
-4
-2
0
2
4
6
8
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1.5 2
-20
-10
0
10
20
30
40
50
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
88
Fig. (III. 23) : Rsultats de simulation lors des variations du flux
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1. 6 1.8 2
-4
-3
-2
-1
0
1
2
3
4
t emps (s)
p
o
s
i
t
i
o
n
(
r
d
)
consigne
sort ie (sans v ariat ion)
sort ie (0.8*Fie)
sort ie (1.1*Fie)
0 0. 5 1 1.5 2
-60
-40
-20
0
20
40
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1.5 2
-5
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 5 1 1.5 2
-1
-0. 5
0
0. 5
1
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1.5 2
-10
0
10
20
30
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
89
Fig. (III. 24) : Rsultats de simulation lors des variations de la rsistance R
S
0 0.2 0. 4 0.6 0.8 1 1. 2 1.4 1.6 1. 8 2
-4
-3
-2
-1
0
1
2
3
4
t emps (s)
p
o
s
i
t
i
o
n
(
r
d
)
cons igne
sort ie (sans v ariat ion)
sort ie (-50% de Rs )
sort ie (+50% de Rs)
0 0. 5 1 1.5 2
-40
-20
0
20
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1.5 2
-5
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 5 1 1.5 2
-2
-1
0
1
2
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1.5 2
-10
0
10
20
30
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
90
Fig. (III. 25) : Rsultats de simulation lors de la variation de facteur de pondration
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1. 6 1.8 2
-6
-4
-2
0
2
4
6
t emps (s)
p
o
s
i
t
i
o
n
(
r
d
)
cons igne
sort ie (lamda*10
-
3)
sort ie (lamda*10
-
2)
sort ie (lamada*10
-
1)
sort ie(sans v ariation de lamda)
sort ie (lamda*10)
sort ie (lamda*10
2
)
sort ie (lamda*10
3
)
0 0.5 1 1.5 2
-80
-60
-40
-20
0
20
40
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1. 5 2
-5
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.5 1 1.5 2
-2
-1
0
1
2
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1. 5 2
-10
0
10
20
30
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
91
Fig. (III. 26) : Rsultats de simulation lors des variations de linertie et du facteur de
pondration
0 0.2 0. 4 0.6 0.8 1 1. 2 1.4 1.6 1. 8 2
-4
-3
-2
-1
0
1
2
3
4
t emps (s)
p
o
s
i
t
i
o
n
(
r
d
)
cons igne
sortie (sans v ariat ion)
sortie (+100% de J)
sorti e (+100% de J et lamda *10
2
)
0 0.5 1 1.5 2
-60
-40
-20
0
20
40
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1. 5 2
-5
0
5
10
15
20
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.5 1 1.5 2
-2
-1
0
1
2
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1. 5 2
-10
0
10
20
30
40
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
92
Fig. (III. 27) : Rsultats de simulation lors de la variation de lhorizon de commande
0 0.2 0. 4 0.6 0.8 1 1. 2 1.4 1.6 1. 8 2
-4
-3
-2
-1
0
1
2
3
4
t emps (s)
p
o
s
i
t
i
o
n
(
r
d
)
cons igne
sort ie (Nu=3)
sort ie(Nu=1)
0 0. 5 1 1.5 2
-60
-40
-20
0
20
40
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1.5 2
-5
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0. 5 1 1.5 2
-1
-0. 5
0
0. 5
1
1. 5
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1.5 2
-10
0
10
20
30
40
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
93
Fig. (III. 28) : Rsultats de simulation lors de la variation de lhorizon maximum de
prdiction
0 0.2 0. 4 0.6 0.8 1 1. 2 1.4 1.6 1. 8 2
-4
-3
-2
-1
0
1
2
3
4
t emps (s)
p
o
s
i
t
i
o
n
cons inge
sort ie (N=8)
sort ie (N=40)
0 0.5 1 1.5 2
-40
-20
0
20
t emps (s)
v
i
t
e
s
s
e
(
r
d
/
s
)
0 0. 5 1 1. 5 2
0
5
10
15
t emps (s)
c
o
u
p
l
e
(
N
.
m
)
0 0.5 1 1.5 2
-0. 8
-0. 6
-0. 4
-0. 2
0
0.2
0.4
t emps (s)
c
o
u
r
a
n
t
i
s
d
(
A
)
0 0. 5 1 1. 5 2
0
10
20
30
t emps (s)
c
o
u
r
a
n
t
i
s
q
(
A
)
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
94
III.7.3 Interprtation des rsultats de simulation
La figure (III.6) montre les caractristiques au moment du dmarrage vide de la MSAP
pour une consigne chelon de vitesse de 100 rd/s, on remarque que lallure de vitesse suit
bien sa consigne sans dpassement avec un temps de rponse trs court. Lors du
dmarrage le couple lectromagntique est gal au maximum de la capacit du moteur
(15 N.m), ensuite il se stabilise une valeur pratiquement nulle en rgime permanent. On
remarque aussi que le courant statorique
ds
I est nul et le courant statorique
qs
I est limage
du couple lectromagntique ce qui indique le dcouplage introduit par la commande
vectorielle de la MSAP.
la figure (III.7) montre lapplication de la charge Cr=10 N.m t=0.4s, cette charge
entrain une lgre perte de la vitesse qui est vite rtablie, Le couple lectromagntique
compense le couple de charge,
la figure (II.8) montre linversion de la consigne de vitesse (de 100 rd/s a -100 rd/s), en
rponse ce changement le couple lectromagntique prend la valeur (-12 N.m) puis il
remonte la valeur du couple rsistant (10 N.m) et la vitesse suit toujours sa consigne.
les figures (III.9) et (III.10) montrent le fonctionnemnt en mode dflux le systme
rpond pratiquement sans dpassement mais avec un temps de rponse suprieur celui du
mode normal, au dbut le courant en directe est nul, puis il diminue graduellement vers une
valeur ngative cette composante ngative agit en inverse par rapport au flux de laimant ce
qui conduit un dfluxage
Le plus intrt dune commande est dtre robuste aux variations paramtrique
La figure (III.11) montre la variation de linertie, on remarque que cette variation
naffecte pas la robustesse de la commande.
La figure (III.12) montre que de la variation du flux ninflue pas sur le comportement
des grandeurs de la MSAP.
La figure (III.13) montre linfluence de la variation de la rsistance statorique, on
remarque que la dynamique de la vitesse est lgrement retarde, toutefois, le rejet de
perturbation reste effectif.
La figure (III.14) montre des variations simultanes de tous les paramtres comme
lindique le tableau (II.1), on remarque que malgr les importantes variations les
performances de systme et de rejet de perturbation restent insensibles toutes ces variations.
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
95
La figure (III.15) montre que la diminution du facteur de pondration ninflue pas sur le
temps de rponse puisque il reste identique celui obtenu avant les variations, mme
remarque pour lannulation du facteur de pondration fig. (III.17)
La figure (III.16) montre linfluence de laugmentation du facteur de pondration, on
remarque que cette augmentation se traduit par lapparition dun rgime oscillatoire et une
trs forte dtrioration de la rponse pour
6
10 *
Les rsultats de la simulation de la GPC cascade sont reprsents par les figures (III.19),
(III.20) et (III.21), ces rsultats sont obtenu dans les conditions suivantes :
Dmarrage vide en appliquant une consigne de position trapze de rad, une fois nous
atteignons le rgime permanent nous appliquons un chelon de couple rsistant (10N.m)
t=0.5s ensuite on inverse la consigne de position de rad rad, on remarque que les
performances sont trs bien maintien avec un temps de rponse trs court.
La figure (III.22) montre que la variation de linertie fait introduire des oscillations,
laugmentation de amliore un peu la dynamique comme lindique la figure (III.26)
Les figures (III.23) et (III.24) montrent que la variation du flux ou de la rsistance
statorique naffecte pas les performances du systme.
La figure (III.25) montre que Le comportement des grandeurs de la MSAP nest pas
affect par la diminution du facteur de pondration , mais laugmentation de affecte les
performances, notamment par lapparition dun rgime oscillatoire.
La figure (III.27) montre la variation de lhorizon de commande N
u
, on remarque que
cette variation amliore le temps de rponse de la position avec toutefois laugmentation des
grandeurs de commande (vitesse et courant)
La figure (III.28) montre la variation de lhorizon de prdiction N, on remarque que
laugmentation de se traduit par une lenteur dans la rponse de la position.
CHAPI TRE I I I Commande Pr di ct i ve Gnr al i se de l a MSAP
96
III.8 Conclusion
Dans ce chapitre on a tudi la commande prdictive gnralise, qui est une
combinaison entre la prdiction du comportement futur du procd avec la commande
rtroaction, applique la MSAP.
Les rsultats de simulation obtenus montrent que la GPC donne des rsultats trs
satisfaisants ainsi bien lors dune variation de consigne que lors dune variation de
perturbation. Diffrentes testes ont t effectus, ou les rsultats de simulation montrent bien
que la GPC est robuste aux variations paramtriques. Ensuite on a appliqu le principe de
rglage en cascade pour commander la vitesse et la position en mme temps par des
rgulateurs de type GPC.
Daprs les rsultats obtenus on constate que la GPC cascade apporte des performances
remarquable, notamment, en ce concerne la poursuite de la position sa consigne impos.et
le rejet de la perturbation. En remarque aussi que le GPC cascade est robuste aux variations
des paramtres lectriques mais on observe une lgre dtrioration de la robustesse lors de la
variation de linertie, notons toutefois que la robustesse peut tre amliore par
laugmentation du facteur de pondration en agissant sur les paramtres de rglage et de
conception du rgulateur. Donc, ces paramtres ont une influence dterminante sur le
comportement du systme. Mais il nest pas toujours facile de trouver des valeurs optimales
pour ces paramtres.
Concl usi on Gnr al e
98
Conclusion gnrale
Dans ce mmoire on a tudi une technique de la commande prdictive, applique la
machine synchrone aimants permanents.
On a modlis dabord la M.S.A.P en utilisant le modle de Park, puis on a dfini une
stratgie de commande vectorielle qui permet le dcouplage du systme de la machine.
La modlisation du moteur synchrone aimants permanents par les quations dtat
dans la rfrentiel (d,q) nous a t trs bnfique, du fait quelle nous amne de conclure que,
le moteur synchrone aimants permanents peut tre command en utilisant la transformation
de Park (d,q).
Dans le deuxime chapitre on a prsent la commande vectorielle par orientation du
flux, qui a un principe similaire celui de la M.C.C excitation spare.
Les rsultats de cette commande prsentent de trs bonnes performances avec un dcouplage
assur et une dynamique de rejet de perturbation assez bonne donc un contrle fin de la
vitesse.
Dans le troisime chapitre on a tudi la commande prdictive gnralise et la
commande prdictive gnralise en cascade, applique la MSAP, les rsultats de
simulation indiquent dassez bonnes performances lors de lintervention de la charge et
linversion de la consigne. On a abouti a des commandes de vitesse et de position insensibles
aux variations paramtriques et on a montr quon peut amliorer les performances de sortie
(vitesse et/ou position) du processus commande en agissant sur les paramtres de rglage et
de conception du rgulateur. Donc, ces paramtres ont une influence dterminante sur le
comportement du systme. Mais il nest pas toujours facile de trouver des valeurs optimales
pour ces paramtres.
Perspectives
Pour la continuation de ce travail de recherche on propose dutiliser un algorithme
gntique pour optimiser les paramtres de rglage, dlargir lapplication de cette commande
une gamme plus varie de moteurs, et dtaler les rsultats obtenus en simulation par des
essais exprimentaux sur banc dessais.
Annexe
100
Paramtres de la machine synchrone aimants permanents
Les paramtres de la machine synchrone aimant permanant tudie en simulation sont les
suivants
Rsistance statorique : R=1.4
Inductance directe : L
ds
=0.0066 H
Inductance quadratique : Lqs=0.0058 H
+Nombre de paires de ples : P=3 -
Flux des aimants :
f
=0.1546 wb
Moment dinertie : J=0.00176 k.g.m
2
Frottement visqueux: f=3.8818*10
-4
N.m/rd/s
Bi bl i ogr aphi e
102
BIBLIOGRAPHIE
[1] G. Grellet, G.Cerc, " actionneur Electriques, Principes,Modles, commande ",
Collection Electrotechnique,Edition Eyrolles, 1997
[2] M.Kadjoudj, "Contribution la Commande dune MSAP ", Thse De Doctorat Dtat
Universit De Batna, 2003.
[3] R. Lateb "Commande prdictive gnralise dun moteur synchrone aimant
permanent", Mmoire De magister, Ecole Militaire Polytechnique EMP Alger, 2001.
[4] M. Maaziz, "Commande adaptative des systmes non linaires : Application `a la
commande dune machine asynchrone", Thse de Doctorat, Paris (2000)
[5] I. Quennic, "Optimisation dun procd de fermentation semi continu : Optimisation et
commande", Thse de Doctorat, Toulouse (1990).
[6] A. KADDOURI " tude dune Commande Non Linaire Adaptative dune machine
Synchrone Aimants Permanents ", Thse de Doctorat, Universit Laval, Qubec,
2000.
[7] W. Leonhard, "Control of AC Drives", spring, Verlag, Berlin, 1984
[8] F. Khatounian " Contribution a la Modlisation, LIdentification et la Commande
dune Interface Haptique un Degr de Libert Entraine par une Machine Synchrone
Aimants Permanents " Thse de Doctorat, De LEcole Normale Suprieure de
Cachan, France, 2006.
[9] A. Kassatkine, " Electrotechnique lmentaire", Eddition Mir, Moscou, 1987.
[10] J.Lesenne, F.Notelet, G.Seguier, " Introduction lctrotechnique approfondie ",
Technique et Documentation, Paris XI, 1981.
[11] Y. Amara "contribution la Conception et la Commande des Machine Synchrone
Double Excitation Applique au Vhicule Hybride", Thse de Doctorat, Universit
Paris, France, Dcembre 2001.
Bi bl i ogr aphi e
103
[12] G. Sguier et R. Bausire, "les convertisseurs de llectronique de puissance", la
conversion continu-alternatif Tome 4, deuxime dition, Lavosier TEC II DOC.
[13] F. Labrique et G. Sguier, "La conversion Continu-Alternatif", Technique et
Documentation, Paris, 1995.
[14] J.Caron, J. Hautier "Modlisation et Commande de la MACHINE Asynchrone",
Technique et Documentation, Paris, 1995
[15] T. Rekioua " Contribution la modlisation et la commande vectorielle des MSAP "
Thse de Doctorat, Institut National Polytechnique, Lorraine 1991.
[16] E. G. MIGLIORE, " Commande Prdictive Base de Programmation Semi Dfinie",
thse de doctorat, lInstitut National des Sciences Appliques de Toulouse, 2004.
[17] O. A.V. Albn, "Contribution l'identification et la commande des robots parallles",
thse de doctorat, Universit MONTPELLIER II, 2004.
[18] M. C. LOZADA, " Sur les Modle Flous Adaptatifs Dynamiques ", Thse de doctorat,
lInstitut National des Sciences Appliques de Toulouse,
[19] E.F. Camacho, C.Bordons, "Model Predictive Control", Springer-Verlag London, 2
eme
edition, 2003.
[20] Patrick Boucher, Didier Dumur, "la commande prdictive", collection mthodes et
pratiques de lingnieur, cole centrale de Lille, 1996.
[21] Nicolas Petit, Commande prdictive, Notes de cours, cole centrale Paris, Anne
Scolaire 2005-2006.
[22] Enso Ikonen, Kaddour Najim, " Advenced Process Identification and Control", Marcel
Dekker, New York.Bsel, 1
ere
edition, 2002.
Вам также может понравиться
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabОт EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabОценок пока нет
- CNL Adaptative MSAPДокумент71 страницаCNL Adaptative MSAPhvhvyОценок пока нет
- Simulation de La Machine Asynchrone StatorДокумент9 страницSimulation de La Machine Asynchrone StatorKHALED MESSAOUDI100% (1)
- Carte DspaceДокумент54 страницыCarte DspaceMeriamChadram100% (3)
- Commande Avancee PDFДокумент391 страницаCommande Avancee PDFAdil AbouelhassanОценок пока нет
- 04 MiseДокумент394 страницы04 Misemohammed kennatОценок пока нет
- EXA AutoДокумент6 страницEXA AutoAmina LahmarОценок пока нет
- Rapport de StageДокумент39 страницRapport de StageBrahim EnnajiОценок пока нет
- Com FloueДокумент159 страницCom FloueIbad Imaa100% (1)
- Commande Du Machine AsynchroneДокумент16 страницCommande Du Machine AsynchroneKhaireddine WeslatiОценок пока нет
- Etude Comparative Entre La Commande DTC Trois Niveaux Et La Commande DTC Cinq Niveaux de La Machine AsynchroneДокумент1 страницаEtude Comparative Entre La Commande DTC Trois Niveaux Et La Commande DTC Cinq Niveaux de La Machine AsynchronebenbouhenniОценок пока нет
- Automatique AvanceeДокумент9 страницAutomatique AvanceeimadОценок пока нет
- Neuro Flou PDFДокумент145 страницNeuro Flou PDFbobzooОценок пока нет
- Commande Optimale PDFДокумент47 страницCommande Optimale PDFصليحة احمد0% (1)
- Asservissement PDFДокумент39 страницAsservissement PDFAbdessamad Faraji0% (1)
- TP Info MCCfonct 4 QuadДокумент17 страницTP Info MCCfonct 4 QuadClarisseDebrayОценок пока нет
- DCTSLMДокумент51 страницаDCTSLMELmokhtar HamrouniОценок пока нет
- Commande RobusteДокумент66 страницCommande RobusteRabiiAzdoud100% (1)
- Td1 Dimensionnement Des Systèmes IndustrielsДокумент3 страницыTd1 Dimensionnement Des Systèmes Industrielsعبد الغنيОценок пока нет
- Commande Vectorielle D'une Machine À Induction2Документ46 страницCommande Vectorielle D'une Machine À Induction2Marwan SkОценок пока нет
- Commande Par Logique Floue PDFДокумент2 страницыCommande Par Logique Floue PDFDustin100% (1)
- Méthodes Diagnostic1Документ13 страницMéthodes Diagnostic1achrefchaabaniОценок пока нет
- TP 1Документ10 страницTP 1mouaadhОценок пока нет
- Pfe Rapport FINALEДокумент65 страницPfe Rapport FINALELAHCEN BOUACHIKОценок пока нет
- 1.1 Le Moteur À Réluctance Variable PDFДокумент18 страниц1.1 Le Moteur À Réluctance Variable PDFmabialaОценок пока нет
- Merrakchi KoussailaДокумент57 страницMerrakchi KoussailaDjalal Eddine ChemlalОценок пока нет
- Chapitre III DiagnosticДокумент19 страницChapitre III DiagnosticAssala chellaliОценок пока нет
- Étude Des Harmoniques Et Techniques Réparé2018Документ123 страницыÉtude Des Harmoniques Et Techniques Réparé2018Sarra BÉCHIRIОценок пока нет
- TP Diagnostic1Документ2 страницыTP Diagnostic1Yazid AbouchihabeddineОценок пока нет
- Commande Sans Capteur Mécanique D'une Machine Asynchrone: Master AcademiqueДокумент88 страницCommande Sans Capteur Mécanique D'une Machine Asynchrone: Master AcademiqueWã Lïd SãådätОценок пока нет
- Moteur À Courant ContinuДокумент15 страницMoteur À Courant ContinuhoubaОценок пока нет
- Etude Et Simulation D'un Capteur de Pression CapacitifДокумент79 страницEtude Et Simulation D'un Capteur de Pression CapacitifHassan B'ouОценок пока нет
- Hache UrДокумент50 страницHache UrrajaeОценок пока нет
- Annalyse Et Commande Des Systemes LineaiДокумент84 страницыAnnalyse Et Commande Des Systemes LineaiFifi JojoОценок пока нет
- Expose Sur La Methode de MaxerДокумент14 страницExpose Sur La Methode de MaxerAmadou OuattaraОценок пока нет
- Commande Vectorielle de La Machine AsynchroneДокумент7 страницCommande Vectorielle de La Machine AsynchroneSalmi Nour E'ddineОценок пока нет
- MAAROUK Abdelatif PDFДокумент85 страницMAAROUK Abdelatif PDFhako BouzidОценок пока нет
- TP 6 Simulation Montages Redresseurs MatlabДокумент9 страницTP 6 Simulation Montages Redresseurs MatlabOmar AmriОценок пока нет
- Commande D'un Convertisseur Matriciel Triphasé Par Réseaux de Neurones - Entraînement D'une Machine AsynchroneДокумент132 страницыCommande D'un Convertisseur Matriciel Triphasé Par Réseaux de Neurones - Entraînement D'une Machine AsynchroneBENALI YOUCEF Mohammed100% (1)
- PFE Commande ElectriqueДокумент2 страницыPFE Commande Electriqueأبو رؤوف رابح شرياقОценок пока нет
- Rapport TPДокумент17 страницRapport TPOmar OuchakroОценок пока нет
- TP 1 CMДокумент4 страницыTP 1 CMEmna SaadiОценок пока нет
- 2020 - 2021 - TP1 - SEER - 2 & GECSI-2 - Commande Par Retour d'État+Commande Optimale D'un MCCДокумент2 страницы2020 - 2021 - TP1 - SEER - 2 & GECSI-2 - Commande Par Retour d'État+Commande Optimale D'un MCCimad el-ghayouryОценок пока нет
- Mémoire 19Документ123 страницыMémoire 19Bilal GueraicheОценок пока нет
- Commande OptimaleДокумент76 страницCommande Optimaleelectroblida100% (1)
- Commande Dun Drone Par Mode Glissant PDFДокумент64 страницыCommande Dun Drone Par Mode Glissant PDFKhalil HsaineОценок пока нет
- Mémoire Finale (Chapitre2)Документ28 страницMémoire Finale (Chapitre2)Âÿâčhê ÎsmâïlОценок пока нет
- Commande de La Vitesse D'une MCC Sous Matlab Simulink Version Finale-ConvertiДокумент40 страницCommande de La Vitesse D'une MCC Sous Matlab Simulink Version Finale-ConvertiABOU ELOUAFA ZAKARIA100% (1)
- Backstepping MSAP BonnnnnneДокумент237 страницBackstepping MSAP BonnnnnneMARWAОценок пока нет
- Etude Et Simulation Des Differentes Estimateurs Et ObservateДокумент100 страницEtude Et Simulation Des Differentes Estimateurs Et ObservateYacine AspireОценок пока нет
- 2 Auto Automatique Et SystèmeДокумент56 страниц2 Auto Automatique Et SystèmeHmz OussamaОценок пока нет
- Memoire DIPET II ENSET de Douala 2009Документ74 страницыMemoire DIPET II ENSET de Douala 2009NGOUNE100% (3)
- Chapitre I Entra Nements Electriques A Vitesse Variable-1Документ8 страницChapitre I Entra Nements Electriques A Vitesse Variable-1Mahmoud SettouОценок пока нет
- Simulation Sur Matlab D'Un Systeme D'Asservissement de Vitesse D'Une Machine A Courant ContinuДокумент116 страницSimulation Sur Matlab D'Un Systeme D'Asservissement de Vitesse D'Une Machine A Courant Continungolo shunguОценок пока нет
- Injection Au réseau-STAGEДокумент84 страницыInjection Au réseau-STAGEHasnae SegaouiОценок пока нет
- TP N°1 - Modelisation Des Convertisseurs ElectromecaniquesДокумент5 страницTP N°1 - Modelisation Des Convertisseurs ElectromecaniquesAymen HedОценок пока нет
- Commande Et Supervision D'un Processus de Margarine Via Un Automate Programmable Chaine PiloteДокумент90 страницCommande Et Supervision D'un Processus de Margarine Via Un Automate Programmable Chaine Pilotebentrari boussif100% (1)
- IST Commande Des Machines ELT3 140421 P2Документ105 страницIST Commande Des Machines ELT3 140421 P2Joël SebgoОценок пока нет
- TD 2 CorrigeДокумент2 страницыTD 2 CorrigeIbrahimFaroukSolar100% (2)
- These Matthieu RauchДокумент248 страницThese Matthieu RauchBoutef El HachemiОценок пока нет
- Séries Chro InseaДокумент116 страницSéries Chro InseaEL Hafa AbdellahОценок пока нет
- Livret TD - TP Pac - Version Corrigee - Janvier 2019Документ46 страницLivret TD - TP Pac - Version Corrigee - Janvier 2019Stéphane HuguetОценок пока нет
- Vérifications ELU Et ELS (Poutre 39)Документ62 страницыVérifications ELU Et ELS (Poutre 39)Asting elboujidi abdessamadОценок пока нет
- Perspective IsométriqueДокумент12 страницPerspective IsométriqueRemy AwomoОценок пока нет
- Fiche Technique Prise OPTIMAДокумент1 страницаFiche Technique Prise OPTIMAalexОценок пока нет
- Elements de Construction Mixte - G. MasyДокумент100 страницElements de Construction Mixte - G. Masymathilde.jacques.94Оценок пока нет
- Vidéo Et Audio Sur IPДокумент4 страницыVidéo Et Audio Sur IPINTTICОценок пока нет
- PHD PubliДокумент182 страницыPHD PublimouadОценок пока нет
- Etude Theorique Aile Et Foils Avec Mecaflux Standard Et HelicielДокумент37 страницEtude Theorique Aile Et Foils Avec Mecaflux Standard Et HelicielenguerrandvaubyОценок пока нет
- Présentation Détaillée Nouvelle NFC 15 100-30-07-02-W2Документ34 страницыPrésentation Détaillée Nouvelle NFC 15 100-30-07-02-W2Yacine MezianiОценок пока нет
- Les Equivalences Energetiques Et La Nouvelle Methodologie D Etablissement Des Bilans Energetiques de La France Cle79f5f1Документ2 страницыLes Equivalences Energetiques Et La Nouvelle Methodologie D Etablissement Des Bilans Energetiques de La France Cle79f5f1Kris MoutoussamyОценок пока нет
- Séminaire Fours & Chaudieres (2006)Документ79 страницSéminaire Fours & Chaudieres (2006)Sarra BÉCHIRI100% (1)
- Serie N°2 - Cinématique Des FluidesДокумент10 страницSerie N°2 - Cinématique Des FluidesJasmine Yasmine100% (4)
- LДокумент4 страницыLAmi Zaki100% (1)
- LTM 1090/1 - Porteur UW-01: Table Des MatièresДокумент28 страницLTM 1090/1 - Porteur UW-01: Table Des MatièresncirОценок пока нет
- ALROCДокумент2 страницыALROCAnonymous xBi2FsBxОценок пока нет
- Simulasi Karyawan 2022Документ47 страницSimulasi Karyawan 2022Andrew HadiОценок пока нет
- Fiche 1 Leçon 1quelques Matériaux Utilisés Dans La Vie Quotidienne Prof - Abouelmajd (WWW - Pc1.ma)Документ2 страницыFiche 1 Leçon 1quelques Matériaux Utilisés Dans La Vie Quotidienne Prof - Abouelmajd (WWW - Pc1.ma)mohamed aoubyОценок пока нет
- Rapport de StageДокумент36 страницRapport de StageMouad BalbalОценок пока нет
- Glossaire Matériaux CompositesДокумент34 страницыGlossaire Matériaux CompositesYoussef Khali100% (1)
- 44-TP-Voies Et Ouvrages D'artДокумент55 страниц44-TP-Voies Et Ouvrages D'artdjimy_dzОценок пока нет
- Ge Esa 2018Документ16 страницGe Esa 2018othmane mrichОценок пока нет
- ANJOS - Renovation en CollectifДокумент12 страницANJOS - Renovation en Collectifj_chichouОценок пока нет
- 2022 09 11 01 25 32 - 09a31f84Документ7 страниц2022 09 11 01 25 32 - 09a31f84hamil.oumaima21Оценок пока нет
- Topographie Elementaire InitiationДокумент138 страницTopographie Elementaire InitiationAlinsafi Oussama75% (4)
- Serie 02 Corrigé Convection Tthms 2021 2022Документ4 страницыSerie 02 Corrigé Convection Tthms 2021 2022Nabil MechoucheОценок пока нет
- Polycopie Initiation Aux BiomateriauxДокумент27 страницPolycopie Initiation Aux BiomateriauxMohamed meОценок пока нет
- 18 LachimieverteДокумент17 страниц18 Lachimievertehakimbil100% (1)