Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- A Brief Tutorial On Studio MonitorsДокумент18 страницA Brief Tutorial On Studio MonitorsCurtis O'BrienОценок пока нет
- 93c3 Document 3Документ14 страниц93c3 Document 3NONON NICOLASОценок пока нет
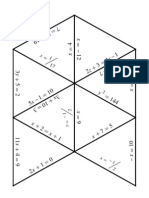
- Algebra1 Review PuzzleДокумент3 страницыAlgebra1 Review PuzzleNicholas Yates100% (1)
- DiДокумент6 страницDipani256Оценок пока нет
- Simple FSKДокумент6 страницSimple FSKFaten AliОценок пока нет
- Framework For A Digital Twin in Manufacturing Scope and RequirementsДокумент3 страницыFramework For A Digital Twin in Manufacturing Scope and RequirementsJoão Vitor100% (1)
- Grade 8 - EnglishДокумент2 страницыGrade 8 - EnglishTCHR KIMОценок пока нет
- EDN Design Ideas 2006Документ142 страницыEDN Design Ideas 2006chag1956100% (1)
- ResumeДокумент3 страницыResumeSaharsh MaheshwariОценок пока нет
- Catalogo Perylsa CompletoДокумент221 страницаCatalogo Perylsa CompletoAlvaro Diaz0% (1)
- Mini Project Report-2Документ26 страницMini Project Report-2Remya Ramakrishnan0% (2)
- Decode A Quadrature Encoder in SoftwareДокумент4 страницыDecode A Quadrature Encoder in SoftwarerdiakurОценок пока нет
- Rama Doss 2015Документ6 страницRama Doss 2015Ubaidulla RasheedОценок пока нет
- Rotary EncoderДокумент6 страницRotary EncoderalesysОценок пока нет
- Evaluation of Fault Analysis in TransmissionДокумент9 страницEvaluation of Fault Analysis in TransmissionChilakuri JayatejaОценок пока нет
- Using Quadrature Encoders With E Series DAQ Boards: Application Note 084Документ11 страницUsing Quadrature Encoders With E Series DAQ Boards: Application Note 084Heriberto Flores AmpieОценок пока нет
- A CMOS Low Power Digital Polar Modulator System Integration For WCDMA TransmitterДокумент7 страницA CMOS Low Power Digital Polar Modulator System Integration For WCDMA TransmitterUday JagannathОценок пока нет
- Working Principle: 1) System CheckДокумент8 страницWorking Principle: 1) System CheckHans IngoleОценок пока нет
- Differential Analog Data Path DC Offset Calibration MethodsДокумент7 страницDifferential Analog Data Path DC Offset Calibration MethodsLincoln RibeiroОценок пока нет
- Arduino Based Underground Cable Fault Detection: Submitted By: AJIT .P. SINGH Faran AnsariДокумент19 страницArduino Based Underground Cable Fault Detection: Submitted By: AJIT .P. SINGH Faran Ansariq8400Оценок пока нет
- Dual BLDC Motor Driver For Arm of Humanoid Robot MARKOДокумент5 страницDual BLDC Motor Driver For Arm of Humanoid Robot MARKOsunwheelОценок пока нет
- Boosted MLIДокумент8 страницBoosted MLIAjmal FarooqОценок пока нет
- Step-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterДокумент6 страницStep-By-Step Design of The Digital Closed Loop System of The Boost Voltage ConverterAMIR SOHAILОценок пока нет
- Design of A Quadrature Decodercounter Interface Ic For Motor ConДокумент6 страницDesign of A Quadrature Decodercounter Interface Ic For Motor ConAmol ElectronicaОценок пока нет
- MCI FeedbSensorДокумент6 страницMCI FeedbSensoravi_ca22Оценок пока нет
- CIGRE 2016: 21, Rue D'artois, F-75008 PARISДокумент10 страницCIGRE 2016: 21, Rue D'artois, F-75008 PARISMarko KojicОценок пока нет
- An Open-Loop Stepper Motor Driver Based On FPGAДокумент5 страницAn Open-Loop Stepper Motor Driver Based On FPGADivya JamesОценок пока нет
- Power Line Fault DetectionДокумент4 страницыPower Line Fault DetectionVishnu JoshiОценок пока нет
- Table of Content: Digital OhmmeterДокумент23 страницыTable of Content: Digital OhmmeterLow Koon Yee100% (1)
- Yang 2019 IOP Conf. SerДокумент7 страницYang 2019 IOP Conf. SerParvej SinglaОценок пока нет
- Direct Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorДокумент6 страницDirect Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorquocyenkcdОценок пока нет
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaДокумент5 страницSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarОценок пока нет
- Data Conversion DevicesДокумент6 страницData Conversion Devicesriya vermaОценок пока нет
- Auto Wireless Tripping System of OverloadДокумент6 страницAuto Wireless Tripping System of OverloadSethu MadhavanОценок пока нет
- Quadrature Encoder Receiver Module: An Implementation On FPGAДокумент12 страницQuadrature Encoder Receiver Module: An Implementation On FPGAสหายดิว ลูกพระอาทิตย์Оценок пока нет
- Ec 303Документ2 страницыEc 303jeetendrasidhiОценок пока нет
- Research Inventy: International Journal of Engineering and ScienceДокумент8 страницResearch Inventy: International Journal of Engineering and ScienceinventyОценок пока нет
- Research On Servo Motor Motion Control System BaseДокумент8 страницResearch On Servo Motor Motion Control System BaseAhmed AliОценок пока нет
- Highway Speed CheckerДокумент24 страницыHighway Speed Checkerritesh chauhanОценок пока нет
- AutoRanging DMMДокумент8 страницAutoRanging DMMPankaj VermaОценок пока нет
- Underground Cable Fault Distance Locator: Project OnДокумент31 страницаUnderground Cable Fault Distance Locator: Project OnsmartyОценок пока нет
- 0.5-V Input Digital LDO With 98.7% Current Efficiency and 2.7-ΜA Quiescent Current in 65nm CMOSДокумент4 страницы0.5-V Input Digital LDO With 98.7% Current Efficiency and 2.7-ΜA Quiescent Current in 65nm CMOSKarim H. MohamedОценок пока нет
- Emi QuestДокумент8 страницEmi Questhanshi123Оценок пока нет
- Reflecting SensorДокумент6 страницReflecting Sensorsrc e-solutionsОценок пока нет
- 56F8300 and 56F8100 ADC: Application NoteДокумент20 страниц56F8300 and 56F8100 ADC: Application NoteToacse IoanОценок пока нет
- BLDC Motor DriverДокумент6 страницBLDC Motor DriverjpmacabascoОценок пока нет
- 15A04602 Electronic Measurements & InstrumentationДокумент2 страницы15A04602 Electronic Measurements & InstrumentationGovardhan Babu GnikОценок пока нет
- 一种0 18微米CMOS工艺下超高速宽带折叠内插ADC的数字校正技术Документ8 страниц一种0 18微米CMOS工艺下超高速宽带折叠内插ADC的数字校正技术Kirankumar LadОценок пока нет
- A Digital Background Technique For Pipelined Analog-to-Digital ConvertersДокумент5 страницA Digital Background Technique For Pipelined Analog-to-Digital ConverterskennyОценок пока нет
- Line Follower Robot Using LabVIEWДокумент6 страницLine Follower Robot Using LabVIEWTrần Huy Vinh QuangОценок пока нет
- Touch Screen Controlled Wheel ChairДокумент5 страницTouch Screen Controlled Wheel Chairnirajthakkar100% (2)
- Tty To Rs232Документ8 страницTty To Rs232sandeepverma8257100% (2)
- EXP 9 - Pulse Code Modulation & DemodulationДокумент5 страницEXP 9 - Pulse Code Modulation & DemodulationsasankflyОценок пока нет
- OrganisationsДокумент10 страницOrganisationsRaj MajiОценок пока нет
- Department of Electronics & Comm. Engg. B.I.T. Mesra, Ranchi EC8101 Intelligent Instrumentation Module - 1Документ11 страницDepartment of Electronics & Comm. Engg. B.I.T. Mesra, Ranchi EC8101 Intelligent Instrumentation Module - 1Teja ViswaОценок пока нет
- Adr233b V2 07Документ29 страницAdr233b V2 07Ritesh Jaiswal100% (1)
- 09 Chapter 3Документ33 страницы09 Chapter 3Bazila ParvezОценок пока нет
- Counters and Shift RegДокумент24 страницыCounters and Shift RegRakesh Kumar D100% (1)
- L4 EaДокумент7 страницL4 EaIoanaNicoletaОценок пока нет
- Ab 02601460148Документ3 страницыAb 02601460148International Journal of computational Engineering research (IJCER)Оценок пока нет
- Wall Following RobotДокумент15 страницWall Following RobotShameer BabuОценок пока нет
- Line Follower With Obstacle Information System Using Zigbee: AbstractДокумент5 страницLine Follower With Obstacle Information System Using Zigbee: AbstractJULIAN GUILLERMO ORTIZ TRUJILLOОценок пока нет
- PDF - Development of A Digital Phase Angle MeterДокумент6 страницPDF - Development of A Digital Phase Angle MeterZuriel MontielОценок пока нет
- Alderamin On The Sky - Volume 7Документ311 страницAlderamin On The Sky - Volume 7Pedro SilvaОценок пока нет
- B1.10 Exchanging MaterialsДокумент4 страницыB1.10 Exchanging MaterialsYevonОценок пока нет
- Post War TheatreДокумент11 страницPost War TheatrePaulPogba77Оценок пока нет
- DCS Ground Charts v350Документ34 страницыDCS Ground Charts v350lkjsdflkjОценок пока нет
- UntitledДокумент37 страницUntitledUnknown UserОценок пока нет
- PCBДокумент5 страницPCBarampandey100% (4)
- Casio AT 1 Service ManualДокумент28 страницCasio AT 1 Service ManualMario Gabriel MoralliОценок пока нет
- Q1 Practical Research 2 - Module 1bДокумент15 страницQ1 Practical Research 2 - Module 1bRhea Mae MacabodbodОценок пока нет
- Cable Systems For High and Extra-High Voltage: Development, Manufacture, Testing, Installation and Operation of Cables and Their AccessoriesДокумент1 страницаCable Systems For High and Extra-High Voltage: Development, Manufacture, Testing, Installation and Operation of Cables and Their AccessorieseddisonfhОценок пока нет
- Kick-Ass Customer Service-Part 1Документ3 страницыKick-Ass Customer Service-Part 1Mahfuzul Haque SujanОценок пока нет
- Vitalis 2000Документ26 страницVitalis 2000ARLОценок пока нет
- Cocoon 8002 PDFДокумент24 страницыCocoon 8002 PDFaxisОценок пока нет
- 1:100 Scale: SPACE-X "Crew Dragon 2" Demo Mission-1 CapsuleДокумент9 страниц1:100 Scale: SPACE-X "Crew Dragon 2" Demo Mission-1 CapsuleBearium YTОценок пока нет
- Advanced Office Add-In DevelopmentДокумент40 страницAdvanced Office Add-In DevelopmentReadoneОценок пока нет
- Ultraviolet Flame Detector: Omniguard Model 660Документ2 страницыUltraviolet Flame Detector: Omniguard Model 660carlosОценок пока нет
- BM Stake Holders Case Study 1st November 2023Документ2 страницыBM Stake Holders Case Study 1st November 2023Arsath malik ArsathОценок пока нет
- Conceptualizing On Structure Functionalism and Its Applications On Patriotism Study During Covid-19 Pandemic in MalaysiaДокумент7 страницConceptualizing On Structure Functionalism and Its Applications On Patriotism Study During Covid-19 Pandemic in MalaysiaMuhammadSyaqirAimanОценок пока нет
- Can Snails Become Habituated To A StimulusДокумент2 страницыCan Snails Become Habituated To A StimulusSachitra Wijethunga100% (1)
- Empowerment TechnologyДокумент15 страницEmpowerment Technologysxhan gwenОценок пока нет
- One Wavelength To Loop SkywireДокумент2 страницыOne Wavelength To Loop SkywireRobert TurnerОценок пока нет
- Critique of Violence - Walter BenjaminДокумент14 страницCritique of Violence - Walter BenjaminKazım AteşОценок пока нет
- Review. Applications of Ecogeography and Geographic Information Systems in Conservation and Utilization of Plant Genetic ResourcesДокумент11 страницReview. Applications of Ecogeography and Geographic Information Systems in Conservation and Utilization of Plant Genetic ResourcesEmilio Patané SpataroОценок пока нет