Вам также может понравиться
- Chieftain 2100X (2-Deck) Data SheetДокумент1 страницаChieftain 2100X (2-Deck) Data SheetbrianОценок пока нет
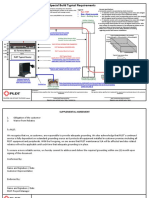
- Special Build Typical Requirements (Rev1) PDFДокумент2 страницыSpecial Build Typical Requirements (Rev1) PDFToper CdjОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- PQT MJ07Документ6 страницPQT MJ07Raguraman BalajiОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Training Seminar ON GSM Held at BSNL: Presented By: Charli Bagga Kriti Rastogi (AEI-08)Документ51 страницаTraining Seminar ON GSM Held at BSNL: Presented By: Charli Bagga Kriti Rastogi (AEI-08)Ankita BharadwajОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Shape and angle detective game for kidsДокумент21 страницаShape and angle detective game for kidsbemusaОценок пока нет
- The Use and Misuse of SEMДокумент30 страницThe Use and Misuse of SEMPPDTBM renОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Body Fat PercentageДокумент7 страницBody Fat Percentagegurveer singhОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Indicate The Answer Choice That Best Completes The Statement or Answers The QuestionДокумент10 страницIndicate The Answer Choice That Best Completes The Statement or Answers The QuestionHasan EserОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Hibbeler D14 e CH 12 P 23Документ2 страницыHibbeler D14 e CH 12 P 23Mona fabrigarОценок пока нет
- Is.10919.1984 ESP StandardДокумент6 страницIs.10919.1984 ESP StandardhbookОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- LC 72322Документ13 страницLC 72322thecanislupusОценок пока нет
- Manual LDM5 U enДокумент3 страницыManual LDM5 U enLuizAugustoMedeirosОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Sensitivity Analysis: Enter Base, Minimum, and Maximum Values in Input CellsДокумент5 страницSensitivity Analysis: Enter Base, Minimum, and Maximum Values in Input CellsSajid IqbalОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Manual Handbook Ripping Cat Selection Techniques Applications Production CompatibilityДокумент32 страницыManual Handbook Ripping Cat Selection Techniques Applications Production CompatibilityPoPandaОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Carbolite CWF1313 004 - 3216Документ44 страницыCarbolite CWF1313 004 - 3216dev-nullОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Student's Error Analysis in Finishing Mathematic Word Problem Based Newman AnalysisДокумент11 страницStudent's Error Analysis in Finishing Mathematic Word Problem Based Newman AnalysisguanyitorОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Measuring Propeller Drop With The Help of Poker GaugeДокумент2 страницыMeasuring Propeller Drop With The Help of Poker Gaugeas100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- Seagate Part1 PDFДокумент113 страницSeagate Part1 PDFwaranhaОценок пока нет
- Visual Studio C++ TutorialДокумент324 страницыVisual Studio C++ TutorialFahadОценок пока нет
- This Study Resource Was: Titration Level 1Документ4 страницыThis Study Resource Was: Titration Level 1Camaya RumbleОценок пока нет
- Transformer X - R CalculationДокумент2 страницыTransformer X - R CalculationTharindu WimalasekaraОценок пока нет
- Blockchain Technology For Cloud Storage - A Systematic Literature ReviewДокумент33 страницыBlockchain Technology For Cloud Storage - A Systematic Literature ReviewNgocОценок пока нет
- Tecquipment - Flumes - Data SheetДокумент3 страницыTecquipment - Flumes - Data SheetArthur BritoОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Diebold ManualДокумент2 страницыDiebold Manualjoseperezlopes069Оценок пока нет
- Midterm - ICT1 ExamДокумент4 страницыMidterm - ICT1 ExamHelen PerlasОценок пока нет
- Assignment ParametersДокумент12 страницAssignment ParametersKrishna Teja JayanthiОценок пока нет
- Explorer - Help RESCOДокумент18 страницExplorer - Help RESCOTomás Oteros OrdóñezОценок пока нет
- T00051 Thrust PositionДокумент17 страницT00051 Thrust PositionmahdilabedОценок пока нет
- 1956 - Colinese - Boiler Efficiencies in SugarДокумент7 страниц1956 - Colinese - Boiler Efficiencies in SugarPaul DurkinОценок пока нет
- Mebs7014 2223 03Документ78 страницMebs7014 2223 03Yuki ChanОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)