Вам также может понравиться
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringОт EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringОценок пока нет
- Chapter 2 Discrete Data Control SystemsДокумент78 страницChapter 2 Discrete Data Control SystemsAmruth ThelkarОценок пока нет
- Chapter 2 Discrete Data Control SystemsДокумент70 страницChapter 2 Discrete Data Control SystemsAmruth Thelkar67% (3)
- ABCs of Modulation Domain Analysis AN01 201 Rev3Документ4 страницыABCs of Modulation Domain Analysis AN01 201 Rev3erdemsecenОценок пока нет
- Some Case Studies on Signal, Audio and Image Processing Using MatlabОт EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabОценок пока нет
- Fundamentals of Microwave Frequency Counters: Application Note 200-1Документ20 страницFundamentals of Microwave Frequency Counters: Application Note 200-1Darshan PatelОценок пока нет
- Me 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesДокумент13 страницMe 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesSenthil KumarОценок пока нет
- Study and Use of Computerized Data Acquisition/data Logger SystemДокумент7 страницStudy and Use of Computerized Data Acquisition/data Logger SystemHimanshuKalbandheОценок пока нет
- Data Acquisition: An Introduction: Bruxton CorporationДокумент7 страницData Acquisition: An Introduction: Bruxton CorporationIvo DimitrovОценок пока нет
- Measurement of Transient Responses in AGC Circuits Using The Audio Analyzers Upl and UpdДокумент8 страницMeasurement of Transient Responses in AGC Circuits Using The Audio Analyzers Upl and UpdHoang LongОценок пока нет
- Es1107 Assignment-01Документ6 страницEs1107 Assignment-01K. BHANU PRAKASH REDDYОценок пока нет
- Institut Teknologi Bandung: Data Acquisition System SimulationДокумент26 страницInstitut Teknologi Bandung: Data Acquisition System Simulation125Jonwin Fidelis FamОценок пока нет
- Signal Processing and SensorsДокумент51 страницаSignal Processing and SensorsKassimОценок пока нет
- Principles of Operation - Sensor MeasurementДокумент3 страницыPrinciples of Operation - Sensor MeasurementAnre Thanh HungОценок пока нет
- Modal Analysis and Condition MonitoringДокумент5 страницModal Analysis and Condition Monitoringbidyutkr30100% (2)
- Mechatronics:: Unit I Mechatronics, Sensors and ActuatorsДокумент31 страницаMechatronics:: Unit I Mechatronics, Sensors and ActuatorsChandra HasanОценок пока нет
- Digital Control System PDFДокумент0 страницDigital Control System PDFwww.bhawesh.com.np100% (1)
- DC Unit-1Документ138 страницDC Unit-1swethachand7Оценок пока нет
- IntroductionДокумент31 страницаIntroductionwhizkidОценок пока нет
- Analog To Digital Conversion Digital To Analog Conversion: Tanauan City CollegeДокумент44 страницыAnalog To Digital Conversion Digital To Analog Conversion: Tanauan City CollegeRalph Laurence G VisayaОценок пока нет
- 000 Digital Control LecturesДокумент67 страниц000 Digital Control LecturesPX PRОценок пока нет
- Vibration Measurements On Slow Speed MachineryДокумент9 страницVibration Measurements On Slow Speed MachineryMohd Asiren Mohd SharifОценок пока нет
- Introduction To Digital Control SystemДокумент20 страницIntroduction To Digital Control SystemApril SurОценок пока нет
- High Speed Numerical Techniques For Transmission Line ProtectionДокумент4 страницыHigh Speed Numerical Techniques For Transmission Line ProtectionFabrício CoelhoОценок пока нет
- AN200 Fundamentals of Electronic CountersДокумент44 страницыAN200 Fundamentals of Electronic CountersfahkingmoronОценок пока нет
- Signal Processing For Effective Vibration AnalysisДокумент11 страницSignal Processing For Effective Vibration AnalysisMario Alfonso Zaragoza ZuñigaОценок пока нет
- PAM, PPM, PWM Modulation and Demodulation Trainer ST2110 LearningДокумент67 страницPAM, PPM, PWM Modulation and Demodulation Trainer ST2110 Learningchemavalencia100% (2)
- Experiment: To Demonstrate The Sampling Operations As A First Step Towards Digitisation of An Analog WavefromДокумент15 страницExperiment: To Demonstrate The Sampling Operations As A First Step Towards Digitisation of An Analog WavefromDineth KanishkaОценок пока нет
- All Digital Timing Recovery and FPGA Implementation: Daniel Cárdenas, Germán ArévaloДокумент6 страницAll Digital Timing Recovery and FPGA Implementation: Daniel Cárdenas, Germán Arévalom0hmdОценок пока нет
- Effective Multi-Tap Transformer Measurement Using A Scanner and The 4263B LCR MeterДокумент9 страницEffective Multi-Tap Transformer Measurement Using A Scanner and The 4263B LCR MetertomichelОценок пока нет
- Report On Prognosis of Faulty GearДокумент20 страницReport On Prognosis of Faulty GearShashi Bhushan GunjanОценок пока нет
- Bell BP BrochureДокумент4 страницыBell BP Brochure@@ngОценок пока нет
- High Speed Numerical Techniques For Transmission Line Protection S D A PickeringДокумент4 страницыHigh Speed Numerical Techniques For Transmission Line Protection S D A Pickeringkvasquez1979Оценок пока нет
- K Flop ManualДокумент306 страницK Flop Manualhappydude7632Оценок пока нет
- DC FarraДокумент22 страницыDC FarrargegОценок пока нет
- Piston - Prover - Quadruple - Timing - Pulse - InterpolationДокумент3 страницыPiston - Prover - Quadruple - Timing - Pulse - InterpolationTest_7890Оценок пока нет
- Temperature Measurement CircuitsДокумент22 страницыTemperature Measurement Circuitsestraj1954Оценок пока нет
- 2.004 Dynamics and Control Ii: Mit OpencoursewareДокумент7 страниц2.004 Dynamics and Control Ii: Mit OpencoursewareVishay RainaОценок пока нет
- Control Lab Report Experiment No. 07Документ2 страницыControl Lab Report Experiment No. 07Nahin AminОценок пока нет
- DKS - EMC - 2.1,2.2,2.3 SIGNAL CONDITIONING - Part-1 - Dipak Kumar SahaДокумент12 страницDKS - EMC - 2.1,2.2,2.3 SIGNAL CONDITIONING - Part-1 - Dipak Kumar SahaPrabir PaulОценок пока нет
- Signal (4) Task (1) : Mohammed Desoky Mahmoud 20151184Документ6 страницSignal (4) Task (1) : Mohammed Desoky Mahmoud 20151184Mohammed DesokyОценок пока нет
- Measurement & Instrumentation BMM3532: Accelerometer'Документ4 страницыMeasurement & Instrumentation BMM3532: Accelerometer'Mohd NasirОценок пока нет
- Digital Communication Principles-1Документ35 страницDigital Communication Principles-1Kevin NdemoОценок пока нет
- Breadboard Experiments NImyDAQ and MultisimДокумент84 страницыBreadboard Experiments NImyDAQ and MultisimmadangkОценок пока нет
- Computed Order Tracking Applied To Vibration Analysis of Rotating MachineryДокумент2 страницыComputed Order Tracking Applied To Vibration Analysis of Rotating MachineryJulio Pacheco BarraОценок пока нет
- Unit 4Документ108 страницUnit 4mjyothsnagoudОценок пока нет
- Mkm1133 Instrumentation and Control SystemДокумент19 страницMkm1133 Instrumentation and Control SystemNurul Nadia Mohd ZawawiОценок пока нет
- Department of E.C.E.: Digital Communications Lab ManualДокумент29 страницDepartment of E.C.E.: Digital Communications Lab Manualమొక్కపాటి మాధవిОценок пока нет
- Low Pass Filter ReportДокумент5 страницLow Pass Filter Reportadrien das guptaОценок пока нет
- Progress ReportДокумент17 страницProgress Reportkavita gangwarОценок пока нет
- Lecture 3 - 2022 - FinalДокумент67 страницLecture 3 - 2022 - FinalFrancis LubangoОценок пока нет
- AN10073 How To Setup A Real Time Oscilloscope To Measure JitterДокумент12 страницAN10073 How To Setup A Real Time Oscilloscope To Measure JitterMOHSENОценок пока нет
- Unit 5 MergedДокумент71 страницаUnit 5 MergedSakshiОценок пока нет
- 4.5.4 Pulse Code Modulation PDFДокумент40 страниц4.5.4 Pulse Code Modulation PDFFirdausОценок пока нет
- Pengenalan Kepada Sistem Instrumentasi Dan Pengukuran EMM 3242Документ40 страницPengenalan Kepada Sistem Instrumentasi Dan Pengukuran EMM 3242Mohd FazliОценок пока нет
- DCS 1Документ17 страницDCS 1Anna BrookeОценок пока нет
- Robust and Low-Cost Proximity Sensor For Line Detection Robot Using Goertzel AlgorithmДокумент4 страницыRobust and Low-Cost Proximity Sensor For Line Detection Robot Using Goertzel AlgorithmGuillem Cabo PitarchОценок пока нет
- Bo 0237Документ2 страницыBo 0237Enrique Javier ZuppelliОценок пока нет
- Introduction To Data Mining - Rev PDFДокумент1 страницаIntroduction To Data Mining - Rev PDFlhy20283Оценок пока нет
- 07 Bubble BreakДокумент25 страниц07 Bubble BreakWeb LogueandoОценок пока нет
- Bumble BizzДокумент38 страницBumble BizzAxel RomanoОценок пока нет
- Observed Impact of Internet Café Near The School Vicinity To The Students Academics Performances On VnhsДокумент19 страницObserved Impact of Internet Café Near The School Vicinity To The Students Academics Performances On VnhsMichelle Renee DaqueОценок пока нет
- As 2282.8-1999 Methods For Testing Flexible Cellular Polyurethane Determination of Force DeflectionДокумент2 страницыAs 2282.8-1999 Methods For Testing Flexible Cellular Polyurethane Determination of Force DeflectionSAI Global - APACОценок пока нет
- Cyberbullying BrochureДокумент2 страницыCyberbullying Brochureapi-614083099Оценок пока нет
- Unix ShellДокумент2 страницыUnix ShellVasudeva AcharyaОценок пока нет
- Alogorithm and DS PG DAC - Aug 19Документ34 страницыAlogorithm and DS PG DAC - Aug 19ravi malegaveОценок пока нет
- WinДокумент1 страницаWinRobert JuricicОценок пока нет
- Hoewerkthet EngelsДокумент10 страницHoewerkthet EngelsLubna SubhanОценок пока нет
- Nursing InformaticsДокумент43 страницыNursing Informaticstummalapalli venkateswara rao67% (3)
- Verification Automation Using IPXACT - Jindal and SinglaДокумент31 страницаVerification Automation Using IPXACT - Jindal and SinglaLuis B. Da SilvaОценок пока нет
- GPONДокумент33 страницыGPONRajiv Ranjan100% (2)
- Shortcut Description: Tally ShortcutsДокумент3 страницыShortcut Description: Tally ShortcutsSantosh KuperkarОценок пока нет
- 2011 Goupil, P. AIRBUS State of The Art and Practices On FDI and FTC in FCSДокумент16 страниц2011 Goupil, P. AIRBUS State of The Art and Practices On FDI and FTC in FCScmpmarinhoОценок пока нет
- Final Steps of 10g LISK by Ankit Tushar EXcel READ APPLIДокумент7 страницFinal Steps of 10g LISK by Ankit Tushar EXcel READ APPLIAnkit ModiОценок пока нет
- Chapter 02 SlidesДокумент57 страницChapter 02 SlidesZahraa AlQallafОценок пока нет
- Stack Data Structures in JavaДокумент14 страницStack Data Structures in JavaletsjoyОценок пока нет
- Soi Design: Digital TechniquesДокумент18 страницSoi Design: Digital TechniquesPavamana GiribhattanavarОценок пока нет
- Chart Recorder CertificateДокумент2 страницыChart Recorder CertificateShwanОценок пока нет
- Metron 05 C: Metal DetectorДокумент10 страницMetron 05 C: Metal DetectorPavelОценок пока нет
- G. Gevorgyan, M.markosyan+ C++Документ229 страницG. Gevorgyan, M.markosyan+ C++HaykОценок пока нет
- Sage X3 Partner Learning Catalog - 2020 - FINAL OctДокумент50 страницSage X3 Partner Learning Catalog - 2020 - FINAL OctDinesh PandianОценок пока нет
- Th42px74ea PDFДокумент48 страницTh42px74ea PDFJuan GutierrezОценок пока нет
- Term PaperДокумент13 страницTerm PaperGoutam TulsiyanОценок пока нет
- Future of IT Audit Report - Res - Eng - 0219Документ20 страницFuture of IT Audit Report - Res - Eng - 0219Immanuel GiuleaОценок пока нет
- Mercedes: OUTUBRO/2015Документ26 страницMercedes: OUTUBRO/2015Vitor J. MartinsОценок пока нет
- 1 Prolog 01-06-2012Документ5 страниц1 Prolog 01-06-2012A B M Moniruzzaman KhanОценок пока нет
- Lecture 1 IntroductionДокумент36 страницLecture 1 IntroductionEsraa AliОценок пока нет
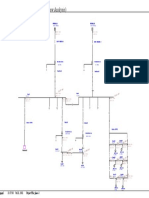
- One-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVДокумент1 страницаOne-Line Diagram - OLV1 (Load Flow Analysis) : 33.0 7 KV 33.0 7 KV 33.0 7 KV 33.0 7 KVhaiderОценок пока нет