Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- ATM Tank Calc (Converted)Документ5 страницATM Tank Calc (Converted)rahul84803Оценок пока нет
- 4B4DC764AC39AFAD5D5F9C87B731618Документ12 страниц4B4DC764AC39AFAD5D5F9C87B731618Rama KrishnaОценок пока нет
- CFNetworkDownload HPNSVBДокумент2 страницыCFNetworkDownload HPNSVBmohamadОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Design of Welded Connections PDFДокумент37 страницDesign of Welded Connections PDFMarat Khodzhaiev100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- DhansДокумент2 страницыDhansTeju AshuОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Favourites: Course DescriptionДокумент3 страницыFavourites: Course DescriptionTeju AshuОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- List of Recruitment Agencies in DubaiДокумент8 страницList of Recruitment Agencies in DubaiTeju Ashu100% (1)
- Lifting Beam Deign Staad 82187560 Design Calc 10t Spreader Beam PDFДокумент20 страницLifting Beam Deign Staad 82187560 Design Calc 10t Spreader Beam PDFDhanraj VasanthОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- 3 X 3 TutorialДокумент1 страница3 X 3 TutorialTariq ZuhlufОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- List of Recruitment Agencies in DubaiДокумент8 страницList of Recruitment Agencies in DubaiTeju Ashu100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Anchor Bolt PDFДокумент6 страницAnchor Bolt PDFTarun saiОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Risk Assessment PDFДокумент54 страницыRisk Assessment PDFTeju AshuОценок пока нет
- Eqivalent Elastic Properties of Corrugated Sandwich Panel: Sandvičs, Gofreta PlatneДокумент10 страницEqivalent Elastic Properties of Corrugated Sandwich Panel: Sandvičs, Gofreta PlatneTeju AshuОценок пока нет
- A Guide To Lifting Beams and SpreadersДокумент34 страницыA Guide To Lifting Beams and Spreadersruov50% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Anchor Bolt PDFДокумент6 страницAnchor Bolt PDFTarun saiОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Chapter 3 - SP17!09!07 - Excluding MP DiagramsДокумент17 страницChapter 3 - SP17!09!07 - Excluding MP DiagramsEdgar AndradeОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Design PhilosophiesДокумент23 страницыDesign PhilosophiesTeju AshuОценок пока нет
- KLH - Component Catalogue For Cross Laminated Timber - Version 01 - 2011Документ20 страницKLH - Component Catalogue For Cross Laminated Timber - Version 01 - 2011Teju AshuОценок пока нет
- KLH - Component Catalogue For Cross Laminated Timber - Version 01 - 2011Документ20 страницKLH - Component Catalogue For Cross Laminated Timber - Version 01 - 2011Teju AshuОценок пока нет
- Lecture3 Concr Beams ColumnsДокумент36 страницLecture3 Concr Beams ColumnsTeju AshuОценок пока нет
- Aisc Design Examples v14Документ125 страницAisc Design Examples v14Daniyal Ahmed100% (2)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- ,JKHVGHVCMC LKДокумент5 страниц,JKHVGHVCMC LKbrintopvОценок пока нет
- 2017 Timber Tower Som Aisc ReportДокумент33 страницы2017 Timber Tower Som Aisc ReportTeju AshuОценок пока нет
- Design PhilosophiesДокумент23 страницыDesign PhilosophiesTeju AshuОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Anchor Bolt PDFДокумент6 страницAnchor Bolt PDFTarun saiОценок пока нет
- Anchor Bolt PDFДокумент6 страницAnchor Bolt PDFTarun saiОценок пока нет
- ,JKHVGHVCMC LKДокумент5 страниц,JKHVGHVCMC LKbrintopvОценок пока нет
- Base Plate ASDДокумент7 страницBase Plate ASDNguyen Duc CuongОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Column Design - As Per BS CodeДокумент16 страницColumn Design - As Per BS CodeTeju AshuОценок пока нет
- Fracture Toughness and FatigueДокумент93 страницыFracture Toughness and FatigueVanvan BitonОценок пока нет
- Structural Design Report of 24 MLD SBR Basin at Newtown PDFДокумент13 страницStructural Design Report of 24 MLD SBR Basin at Newtown PDFvenkatesanjsОценок пока нет
- Actual Questions in MMUP Exam For CivilДокумент1 страницаActual Questions in MMUP Exam For CivilTheodoros Michail100% (2)
- Steel Plate Bonding MethodДокумент29 страницSteel Plate Bonding MethodSiti Rohani Isdris100% (1)
- Problem Set No. 1Документ2 страницыProblem Set No. 1russelpagaoОценок пока нет
- ETABS - Design of RC Structures To EC2Документ24 страницыETABS - Design of RC Structures To EC2Tai Pham100% (1)
- Nature of Reservoir Fluids Phase Behaviour of Reservoir FluidsДокумент83 страницыNature of Reservoir Fluids Phase Behaviour of Reservoir FluidsAnonymous qaI31HОценок пока нет
- Defects in Crystalline Materials (M)Документ32 страницыDefects in Crystalline Materials (M)Michael Vincent MirafuentesОценок пока нет
- Strength of Materials CIE 302Документ88 страницStrength of Materials CIE 302kingОценок пока нет
- Mechanisms of Shear' FailureДокумент8 страницMechanisms of Shear' FailureZhiqi HEОценок пока нет
- Annealing Free, Clean Graphene Transfer Using Alternative Polymer ScaffoldsДокумент46 страницAnnealing Free, Clean Graphene Transfer Using Alternative Polymer ScaffoldsNia SyafiqqОценок пока нет
- Introduction To Nano: TechnologyДокумент17 страницIntroduction To Nano: Technologyေအာင္ ေက်ာ္ စြာОценок пока нет
- CWB Level 2 MODULE 7 RESIDUAL STRESS & DISTORTION Flashcards - Quizlet - PDF (CWB 2)Документ17 страницCWB Level 2 MODULE 7 RESIDUAL STRESS & DISTORTION Flashcards - Quizlet - PDF (CWB 2)HusnainAhmedОценок пока нет
- Shi J and D. Asimaki (2017) Formulation and Validation of A Hybrid Nonlinear Soil Model For Site-Response AnalysesДокумент20 страницShi J and D. Asimaki (2017) Formulation and Validation of A Hybrid Nonlinear Soil Model For Site-Response AnalysesSandraОценок пока нет
- NF LCF12 E01Документ2 страницыNF LCF12 E01Cy RamosОценок пока нет
- Technical Data: Ethacure 300Документ2 страницыTechnical Data: Ethacure 300sriatul2006Оценок пока нет
- Carl T. Herakovich-A Concise Introduction To Elastic Solids - An Overview of The Mechanics of Elastic Materials and Structures-Springer (2017)Документ136 страницCarl T. Herakovich-A Concise Introduction To Elastic Solids - An Overview of The Mechanics of Elastic Materials and Structures-Springer (2017)ManuelPérezОценок пока нет
- Aeronautical Syllabus - RTU KotaДокумент83 страницыAeronautical Syllabus - RTU KotaAnshul KhandelwalОценок пока нет
- Effects of On-Line Melt Blending of Polypropylene With Polyamide 6 On The Bulk and Strength of The Resulting BCF YarnДокумент10 страницEffects of On-Line Melt Blending of Polypropylene With Polyamide 6 On The Bulk and Strength of The Resulting BCF YarnianОценок пока нет
- Speaker CableДокумент1 страницаSpeaker CableEslam ElshamhoutОценок пока нет
- IGM Additives Product GuideДокумент20 страницIGM Additives Product GuideColoke AdesivosОценок пока нет
- A Simple Example of Pressure Excitation-The 3D Square Well PotentialДокумент7 страницA Simple Example of Pressure Excitation-The 3D Square Well PotentialYashОценок пока нет
- TGN PE 01 Hardness Testing of WeldsДокумент7 страницTGN PE 01 Hardness Testing of WeldsadelОценок пока нет
- Autofrettage in Pressure VesselsДокумент28 страницAutofrettage in Pressure Vesselssran1986Оценок пока нет
- NTC 2008 Ex002 PDFДокумент5 страницNTC 2008 Ex002 PDFputra wiraОценок пока нет
- BABU - 570 Exam QuestionsДокумент4 страницыBABU - 570 Exam QuestionsSunny Thundil100% (1)
- Pso Spincot OilДокумент1 страницаPso Spincot OilAzad KiyalОценок пока нет
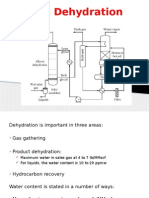
- Gas DehydrationДокумент15 страницGas DehydrationRama Krishna PillaОценок пока нет
- C R Robertson Fundamental Electrical and ElectroBookZZ - Org 15Документ10 страницC R Robertson Fundamental Electrical and ElectroBookZZ - Org 15Salmarianto AntoОценок пока нет
- Pulsed Laser Deposition (PLD)Документ32 страницыPulsed Laser Deposition (PLD)Mohit YadavОценок пока нет
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsОт EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsОценок пока нет
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresОт EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresРейтинг: 1 из 5 звезд1/5 (2)
- To Engineer Is Human: The Role of Failure in Successful DesignОт EverandTo Engineer Is Human: The Role of Failure in Successful DesignРейтинг: 4 из 5 звезд4/5 (137)
- Pile Design and Construction Rules of ThumbОт EverandPile Design and Construction Rules of ThumbРейтинг: 4.5 из 5 звезд4.5/5 (15)
- Structural Cross Sections: Analysis and DesignОт EverandStructural Cross Sections: Analysis and DesignРейтинг: 4.5 из 5 звезд4.5/5 (19)
- Pocket Guide to Flanges, Fittings, and Piping DataОт EverandPocket Guide to Flanges, Fittings, and Piping DataРейтинг: 3.5 из 5 звезд3.5/5 (22)