Вам также может понравиться
- s2018 Agreg Externe Sii 1 917237Документ46 страницs2018 Agreg Externe Sii 1 917237Ahmed JellouliОценок пока нет
- 2022 MP SI MinesPonts SДокумент26 страниц2022 MP SI MinesPonts Sleobrut28Оценок пока нет
- Si MP 2022Документ16 страницSi MP 2022NguyenОценок пока нет
- TDS1Chariot de Golf SymlalistarДокумент18 страницTDS1Chariot de Golf Symlalistarsisko blОценок пока нет
- 940642-An-01-Fr-Antennen Stab Rotor SAT HH120 PDFДокумент14 страниц940642-An-01-Fr-Antennen Stab Rotor SAT HH120 PDFbekraОценок пока нет
- Notice D'utilisationДокумент12 страницNotice D'utilisationMendoud SofianeОценок пока нет
- SIMines PSIДокумент17 страницSIMines PSImothsnorОценок пока нет
- PSIДокумент14 страницPSImatheo.chav.12Оценок пока нет
- Cours Aéronautique Partie6Документ7 страницCours Aéronautique Partie6Fatima FatimaОценок пока нет
- La Mesure de L'insolation RRR PDFДокумент7 страницLa Mesure de L'insolation RRR PDFLebeОценок пока нет
- 03128A Thermalim IIДокумент15 страниц03128A Thermalim IIRenato FernandesОценок пока нет
- 3-Eamac Appareils EnregistreursДокумент7 страниц3-Eamac Appareils EnregistreursLebeОценок пока нет
- TD Révision Cinematique Du SolideДокумент8 страницTD Révision Cinematique Du SolideRomain MarroОценок пока нет
- TD Helico AscenseurДокумент8 страницTD Helico AscenseurWakule Christian MurhabaziОценок пока нет
- Centrale 2001 Si PSIДокумент15 страницCentrale 2001 Si PSIbackhousiaОценок пока нет
- Système de Sécurité AscenseurДокумент8 страницSystème de Sécurité AscenseurAdelaide Nathalie Wlliam Cissè100% (1)
- CNC 2011 Psi SiДокумент29 страницCNC 2011 Psi SiSimo GuermoudОценок пока нет
- TD1 Logique FloueДокумент8 страницTD1 Logique FloueBrahim Gasbaoui100% (1)
- DS2 MPII - 27 - 01 - 24 (Sujet)Документ6 страницDS2 MPII - 27 - 01 - 24 (Sujet)cyrinekrichen24Оценок пока нет
- Dpreparation EST2004Документ20 страницDpreparation EST2004sid ali saidjОценок пока нет
- (Cin) (TD) Centrifugeuse Humaine PDFДокумент4 страницы(Cin) (TD) Centrifugeuse Humaine PDFoussemaОценок пока нет
- Chapitre Keratometrie FinalДокумент8 страницChapitre Keratometrie Finalsebouai ouidedОценок пока нет
- [Ene][TD]Quille_pendulaireДокумент8 страниц[Ene][TD]Quille_pendulairekawtarbh2004Оценок пока нет
- TSI3 ModelisationДокумент12 страницTSI3 Modelisationlouna yunaОценок пока нет
- DS4 SujetДокумент8 страницDS4 SujetPierre BeckОценок пока нет
- Irh 060 P2Документ42 страницыIrh 060 P2Ihab El FissiОценок пока нет
- La Conception Du Système D'entraînement D'un TélescopeДокумент1 страницаLa Conception Du Système D'entraînement D'un TélescopetotoОценок пока нет
- Voilure TournanteДокумент6 страницVoilure TournantepascalОценок пока нет
- Connaissance Aero Cours8Документ37 страницConnaissance Aero Cours8rephoneshop rephoneshopОценок пока нет
- Zero SSI Bac2003toulouseДокумент15 страницZero SSI Bac2003toulouseمهدي الرقيقОценок пока нет
- Cours - mto-sat-EMISSION ET RECEPTION DES DONNEESTSM2019 - FinДокумент8 страницCours - mto-sat-EMISSION ET RECEPTION DES DONNEESTSM2019 - FinFortunato ClementeОценок пока нет
- CI04 TD11 Sujet - D - Terminer Un Champ de Vecteur VitesseДокумент6 страницCI04 TD11 Sujet - D - Terminer Un Champ de Vecteur Vitessemed mahfoud bounaОценок пока нет
- 0822 Cinem:08 CinematiquePlane - PdfatiqueplaneДокумент7 страниц0822 Cinem:08 CinematiquePlane - PdfatiqueplanePorata UiopaОценок пока нет
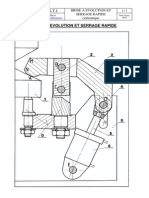
- Bride Serrage RapideДокумент3 страницыBride Serrage RapideRedaAbdraouf0% (2)
- Travaux Diriges Antennes 2022Документ16 страницTravaux Diriges Antennes 2022simo kamto guy lionelОценок пока нет
- 2018-09 DNB Techno Metropole Pilotage-Bateau-2Документ5 страниц2018-09 DNB Techno Metropole Pilotage-Bateau-2juliedelys18Оценок пока нет
- CalculДокумент2 страницыCalculOussama MhamdiОценок пока нет
- Sin T Ef Sig PRQ 0034Документ10 страницSin T Ef Sig PRQ 0034Azziz MIFTAHОценок пока нет
- SED03 TD Sujet - Modéliser Le Comportement Dynamique Des SED Par Diagrammes D'état Et de SéquenceДокумент20 страницSED03 TD Sujet - Modéliser Le Comportement Dynamique Des SED Par Diagrammes D'état Et de SéquenceseddikmorabetОценок пока нет
- Implémentation de La Boucle D'asservissement D'un Drone Bicopter Avec Arduino - Cours - Projets DiversДокумент32 страницыImplémentation de La Boucle D'asservissement D'un Drone Bicopter Avec Arduino - Cours - Projets DiversKamologne UlrichОценок пока нет
- Royaume Du Maroc: Es Procedes Topographiques Pour La Densification de Canevas PlanimetriqueДокумент32 страницыRoyaume Du Maroc: Es Procedes Topographiques Pour La Densification de Canevas PlanimetriqueNiema NiemaОценок пока нет
- Xwing Huge Ships Rules FRДокумент4 страницыXwing Huge Ships Rules FRkyc7c87qf7Оценок пока нет
- PeltonДокумент24 страницыPeltonMohamed Amin DziriОценок пока нет
- Aerodynamique Des EoliennesДокумент55 страницAerodynamique Des EoliennesKacem Hanoun100% (2)
- Système À Étudier - Carton PréforméДокумент14 страницSystème À Étudier - Carton PréforméESSOME ESSOME OLIVIER STEPHANEОценок пока нет
- ENGEES00ScIngPSI-e 2000Документ10 страницENGEES00ScIngPSI-e 2000taruffiОценок пока нет
- Aidouni 210Документ12 страницAidouni 210merzak seghirОценок пока нет
- CCMP Sciences-Industrielles 2010 PSIДокумент30 страницCCMP Sciences-Industrielles 2010 PSIMohamedBenKacemОценок пока нет
- TP Croix de Malte INDEXAДокумент9 страницTP Croix de Malte INDEXASidi RachОценок пока нет
- Exposer TeledetectionДокумент16 страницExposer TeledetectionAmeh Kouadio100% (1)
- TDДокумент5 страницTDYassir Ez-znafry100% (1)
- Travaux Diriges de Mem - RenfoДокумент4 страницыTravaux Diriges de Mem - Renfoyao philémon kouassiОценок пока нет
- R725AДокумент20 страницR725AKhaleel KhanОценок пока нет
- Propulsion Navale BillardДокумент40 страницPropulsion Navale BillardUnica Figlia Kenza100% (1)
- Pratique CrisisДокумент28 страницPratique CrisisRahma GhanemОценок пока нет
- TOPOGRAPHIE 2 Chap IIДокумент21 страницаTOPOGRAPHIE 2 Chap IIFatih IlyezОценок пока нет
- Thèsea 5Документ21 страницаThèsea 5lkmkmlkОценок пока нет
- Exo 2023Документ12 страницExo 2023Marie khОценок пока нет
- Serie #6 1Документ2 страницыSerie #6 1Smal AlaouiОценок пока нет
- Mémoire Magister BOUTAHAR LOTFIДокумент123 страницыMémoire Magister BOUTAHAR LOTFIWarda JoryОценок пока нет
- Systeme de Signalisation - 24 02 16Документ219 страницSysteme de Signalisation - 24 02 16Larba Sawadogo100% (1)
- BOST RaphaelДокумент220 страницBOST RaphaelSAADОценок пока нет
- Dynamique en Translation ExerciceДокумент4 страницыDynamique en Translation Exercicenour1960100% (1)
- DST Final Chimie CorrectionДокумент3 страницыDST Final Chimie CorrectionYoman Arthur verdier AssuiОценок пока нет
- Ict204 TP Examen 2023Документ1 страницаIct204 TP Examen 2023Donald TientcheuОценок пока нет
- Chapitre 1 - Conductivité Des ÉlectrolytesДокумент7 страницChapitre 1 - Conductivité Des ÉlectrolytesBeatrice Florin100% (9)
- Chap-4 Dynamique Fluides VisqueuxДокумент20 страницChap-4 Dynamique Fluides VisqueuxEmmanuel ParrasОценок пока нет
- Protocole de Chiffrement RSAДокумент39 страницProtocole de Chiffrement RSAdjhziadОценок пока нет
- Route 2Документ5 страницRoute 2bisОценок пока нет
- Cours MCCДокумент12 страницCours MCChouss11100% (4)
- Corrigé CF Aut SMC 2020Документ6 страницCorrigé CF Aut SMC 2020mohamed HanouniОценок пока нет
- Combiac 2Документ77 страницCombiac 2bista chaymaОценок пока нет
- Gaston Bachelard - L'Épistémologie Non-CartésienneДокумент14 страницGaston Bachelard - L'Épistémologie Non-CartésienneAlexyu RasqualОценок пока нет
- Comment Dimensionner Le Vase D'expansionДокумент5 страницComment Dimensionner Le Vase D'expansionAbdelwaheb RjebОценок пока нет
- Cours Ingénierie Des TélécommunicationsДокумент70 страницCours Ingénierie Des TélécommunicationsDaniel Ella100% (1)
- 3 DES Radio Instrumentation TEP Et TEMPДокумент83 страницы3 DES Radio Instrumentation TEP Et TEMPAbdelah El ArabiОценок пока нет
- Chapitre 14 Échanges Des DonnéesДокумент48 страницChapitre 14 Échanges Des DonnéesCarla LimaОценок пока нет
- 338 PDFДокумент9 страниц338 PDFMohammed BdrОценок пока нет
- Cours EnR - Réseaux Electriques Chap 2Документ12 страницCours EnR - Réseaux Electriques Chap 2Ali BoukhrissОценок пока нет
- Tdbiochimie.solutions ConvertiДокумент18 страницTdbiochimie.solutions ConvertinantenainaarthinaОценок пока нет
- Cours UMLДокумент33 страницыCours UMLdeogratias davoОценок пока нет
- Devoir 2scДокумент3 страницыDevoir 2scLotfi KhemiliОценок пока нет
- Suites Numeriques Exercices Non Corriges 3 6Документ6 страницSuites Numeriques Exercices Non Corriges 3 6copie masterОценок пока нет
- Windev 10 Guide Autoformation PDFДокумент474 страницыWindev 10 Guide Autoformation PDFSantiago Marcelino Leon LuisОценок пока нет
- Simplexe-2 2Документ3 страницыSimplexe-2 2Asma AsmitaОценок пока нет
- @2nde D Cours MathsДокумент157 страниц@2nde D Cours MathsPierrot Jules AMOUSSOUОценок пока нет
- Examen MasterTI 13-14-1Документ2 страницыExamen MasterTI 13-14-1Safaa KahilОценок пока нет
- TH8953Документ121 страницаTH8953Ouss AmaОценок пока нет
- TP 3Документ3 страницыTP 3majdoub manelОценок пока нет






















![[Ene][TD]Quille_pendulaire](https://imgv2-1-f.scribdassets.com/img/document/722713147/149x198/d0205329fd/1713031937?v=1)