Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Engineering Materials-Istanbul .Technical UniversityДокумент40 страницEngineering Materials-Istanbul .Technical UniversitybuggrraaОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Dorks List For Sql2019 PDFДокумент50 страницDorks List For Sql2019 PDFVittorio De RosaОценок пока нет
- SCI 121 Disaster Readiness and Risk ReductionДокумент163 страницыSCI 121 Disaster Readiness and Risk ReductionLEONIEVEVE L LIMBAGAОценок пока нет
- Application Problems 1 Through 3Документ5 страницApplication Problems 1 Through 3api-4072164490% (1)
- 70-30-00-918-802-A - Consumable Materials Index For The Engine (Pratt & Whitney)Документ124 страницы70-30-00-918-802-A - Consumable Materials Index For The Engine (Pratt & Whitney)victorОценок пока нет
- Bali Hai LawsuitДокумент14 страницBali Hai LawsuitLas Vegas Review-JournalОценок пока нет
- 15.910 Draft SyllabusДокумент10 страниц15.910 Draft SyllabusSaharОценок пока нет
- Pavement Design - (Rigid Flexible) DPWHДокумент25 страницPavement Design - (Rigid Flexible) DPWHrekcah ehtОценок пока нет
- A Comprehensive Review On Renewable and Sustainable Heating Systems For Poultry FarmingДокумент22 страницыA Comprehensive Review On Renewable and Sustainable Heating Systems For Poultry FarmingPl TorrОценок пока нет
- Tourism: The Business of Hospitality and TravelДокумент33 страницыTourism: The Business of Hospitality and TravelNajla Nabila AurelliaОценок пока нет
- Azure Subscription and Service Limits, Quotas, and ConstraintsДокумент54 страницыAzure Subscription and Service Limits, Quotas, and ConstraintsSorinОценок пока нет
- Sage 200 Evolution Training JourneyДокумент5 страницSage 200 Evolution Training JourneysibaОценок пока нет
- MC 33199Документ12 страницMC 33199Abbode HoraniОценок пока нет
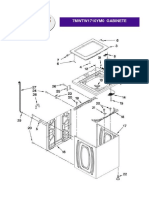
- 7MWTW1710YM0Документ8 страниц7MWTW1710YM0Izack-Dy JimZitОценок пока нет
- Reterta V MoresДокумент13 страницReterta V MoresRam Migue SaintОценок пока нет
- Casesheet 086 Siwertell Hermasa Brazil Grain Unloader TerminalДокумент2 страницыCasesheet 086 Siwertell Hermasa Brazil Grain Unloader TerminalersОценок пока нет
- Application Letters To Apply For A Job - OdtДокумент2 страницыApplication Letters To Apply For A Job - OdtRita NourОценок пока нет
- The Financing Cycle Summary, Case Study, AssignmentsДокумент18 страницThe Financing Cycle Summary, Case Study, AssignmentsbernadetteОценок пока нет
- Steinway Case - CH 03Документ5 страницSteinway Case - CH 03Twēéty TuiñkleОценок пока нет
- Lozada V Bracewell DigestДокумент3 страницыLozada V Bracewell DigestMickey OrtegaОценок пока нет
- SMPLEДокумент2 страницыSMPLEKla AlvarezОценок пока нет
- Step Recovery DiodesДокумент3 страницыStep Recovery DiodesfahkingmoronОценок пока нет
- User Custom PP Install74Документ2 страницыUser Custom PP Install74Zixi FongОценок пока нет
- Upload 1 Document To Download: Ergen DedaДокумент3 страницыUpload 1 Document To Download: Ergen DedakОценок пока нет
- Galanz - Galaxy 7-9-12K - SPLIT PDFДокумент42 страницыGalanz - Galaxy 7-9-12K - SPLIT PDFUbaldo BritoОценок пока нет
- Hi 3 Yt 318201Документ3 страницыHi 3 Yt 318201partha khatuaОценок пока нет
- Mittal Corp LTD 22ND November 2022Документ4 страницыMittal Corp LTD 22ND November 2022Etrans 9Оценок пока нет
- (Ambition) Malaysia 2023 Market Insights ReportДокумент46 страниц(Ambition) Malaysia 2023 Market Insights ReportMaz Izman BudimanОценок пока нет
- PraxiarДокумент8 страницPraxiara_roy003Оценок пока нет
- International Business EnvironmentДокумент5 страницInternational Business EnvironmentrahulОценок пока нет