Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Braun MR30 Hand BlenderДокумент2 страницыBraun MR30 Hand BlenderHana Bernard100% (1)
- GENUS Clock Gating Timing CheckДокумент17 страницGENUS Clock Gating Timing Checkwasimhassan100% (1)
- Selux Installation Manual PDFДокумент75 страницSelux Installation Manual PDFIgorr75% (8)
- Daemon ProcessДокумент12 страницDaemon ProcessNuklir Energi Massa DepanОценок пока нет
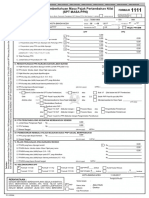
- F 1232040111 in DukДокумент2 страницыF 1232040111 in DukNuklir Energi Massa DepanОценок пока нет
- Soal Try Out Bahasa InggrisДокумент9 страницSoal Try Out Bahasa InggrisNuklir Energi Massa DepanОценок пока нет
- Petrochemical Processes HandbookДокумент209 страницPetrochemical Processes HandbookAnoop Uchagawkar100% (6)
- Try Out Ujian Nasional: Tahun Pelajaran Mata Pelajaran Waktu / Jumlah Soal: 120 Menit/50Документ23 страницыTry Out Ujian Nasional: Tahun Pelajaran Mata Pelajaran Waktu / Jumlah Soal: 120 Menit/50Nuklir Energi Massa DepanОценок пока нет
- Sched LG UДокумент7 страницSched LG UNuklir Energi Massa DepanОценок пока нет
- 1Документ20 страниц1Kelly EstradaОценок пока нет
- Analisis Faktor-Faktor Yang Mempengaruhi Kinerja Keuangan Perusahaan Telekomunikasi Yang Go Public Di Bursa Efek IndonesiaДокумент12 страницAnalisis Faktor-Faktor Yang Mempengaruhi Kinerja Keuangan Perusahaan Telekomunikasi Yang Go Public Di Bursa Efek IndonesiaAzizi Doraini100% (1)
- Caution Eye Irritant: For No 1and 2 Based On The Notice Given!Документ6 страницCaution Eye Irritant: For No 1and 2 Based On The Notice Given!Nuklir Energi Massa DepanОценок пока нет
- Coal Displacement CalculationДокумент1 страницаCoal Displacement CalculationNuklir Energi Massa DepanОценок пока нет
- 3 CementДокумент22 страницы3 CementnecdetdalgicОценок пока нет
- ASME Code News (Questions and Answers)Документ4 страницыASME Code News (Questions and Answers)dj22500Оценок пока нет
- Shell and Tube Heat ExchangerДокумент2 страницыShell and Tube Heat ExchangerNuklir Energi Massa DepanОценок пока нет
- LaporanДокумент6 страницLaporanNuklir Energi Massa DepanОценок пока нет
- Higher Algebra - Hall & KnightДокумент593 страницыHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Certificate AiniaДокумент2 страницыCertificate AiniaNuklir Energi Massa DepanОценок пока нет
- Binary Distillation McCabe ThieleДокумент2 страницыBinary Distillation McCabe Thielelsastré_11Оценок пока нет
- Sertifikat PT. Arun NGLДокумент2 страницыSertifikat PT. Arun NGLNuklir Energi Massa DepanОценок пока нет
- 38 4 437Документ5 страниц38 4 437Nuklir Energi Massa DepanОценок пока нет
- Chemcad Cc5 ExampleДокумент37 страницChemcad Cc5 ExampleBabulu BalarkanОценок пока нет
- Higher Algebra - Hall & KnightДокумент593 страницыHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightДокумент593 страницыHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightДокумент593 страницыHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Kajian Kitab Ilmu - Syaikh UtsaiminДокумент1 страницаKajian Kitab Ilmu - Syaikh UtsaiminNuklir Energi Massa DepanОценок пока нет
- 003 GingerДокумент8 страниц003 GingerNuklir Energi Massa DepanОценок пока нет
- Higher Algebra - Hall & KnightДокумент593 страницыHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightДокумент593 страницыHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- APS PresentationДокумент32 страницыAPS PresentationRozack Ya ZhackОценок пока нет
- PROP CASES OUTLINE 7 - Right of Way - Light & ViewДокумент108 страницPROP CASES OUTLINE 7 - Right of Way - Light & ViewKringle Lim - DansalОценок пока нет
- Micro Fibra Sintetica at 06-MapeiДокумент2 страницыMicro Fibra Sintetica at 06-MapeiSergio GonzalezОценок пока нет
- AR Financial StatementsДокумент281 страницаAR Financial StatementsISHA AGGARWALОценок пока нет
- VDRL - Press. GaugesДокумент9 страницVDRL - Press. GaugesSourav RayОценок пока нет
- Review of Related Literature and Related StudiesДокумент23 страницыReview of Related Literature and Related StudiesReynhard Dale100% (3)
- Daewoo SJ-210H DSJ-6000LHMДокумент44 страницыDaewoo SJ-210H DSJ-6000LHMMarco Antonio100% (5)
- L&T Motor CatalogДокумент24 страницыL&T Motor CatalogSanjeev DhariwalОценок пока нет
- JAMB Syllabus For BiologyДокумент27 страницJAMB Syllabus For BiologyOluebube UchennaОценок пока нет
- Scale Aircraft Modelling 01.2019Документ100 страницScale Aircraft Modelling 01.2019Nikko LimuaОценок пока нет
- The King's Avatar - Chapter 696 - Guild Feature - Gravity TalesДокумент5 страницThe King's Avatar - Chapter 696 - Guild Feature - Gravity TalesMayhaaaОценок пока нет
- Test Cases: Project Name: Virtual ClassroomДокумент5 страницTest Cases: Project Name: Virtual ClassroomTina HernandezОценок пока нет
- E Commerce and Its Influence in Changing in Purchasing Behavior of Modern ConsumersДокумент13 страницE Commerce and Its Influence in Changing in Purchasing Behavior of Modern ConsumersRichard VillanuevaОценок пока нет
- Data Analyst Chapter 3Документ20 страницData Analyst Chapter 3Andi Annisa DianputriОценок пока нет
- Paso de Blas Lying in Clinic For NewДокумент5 страницPaso de Blas Lying in Clinic For NewNaheed Dean MustafaОценок пока нет
- Construction of Perimeter Fence of BFP NHQ PDFДокумент133 страницыConstruction of Perimeter Fence of BFP NHQ PDFYalla ChaitanyaОценок пока нет
- Auburn Bsci ThesisДокумент5 страницAuburn Bsci Thesisafksaplhfowdff100% (1)
- Molecules of Life PDFДокумент113 страницMolecules of Life PDFArpit Pradhan100% (1)
- FE 208 Lab #4 - Profile Leveling: CrewДокумент4 страницыFE 208 Lab #4 - Profile Leveling: CrewJefferson Himson0% (1)
- Kobelco CK1100G Spec BookДокумент38 страницKobelco CK1100G Spec BookEjeantengОценок пока нет
- El Nino 3Документ8 страницEl Nino 3nisAfiqahОценок пока нет
- CR-805 Retransfer PrinterДокумент2 страницыCR-805 Retransfer PrinterBolivio FelizОценок пока нет
- CalculusДокумент101 страницаCalculuskusnoОценок пока нет
- Musk Founded Space Exploration Technologies Corporation, or Spacex, in 2002 With TheДокумент4 страницыMusk Founded Space Exploration Technologies Corporation, or Spacex, in 2002 With TheLauren Harris0% (1)
- Day 1 Training Material FlowДокумент200 страницDay 1 Training Material FlowGhazouani AymenОценок пока нет
- SmoothWall Express 2.0 Quick-Start GuideДокумент6 страницSmoothWall Express 2.0 Quick-Start Guideinfobits100% (1)
- DRUGPДокумент371 страницаDRUGPPolarogramaОценок пока нет