Вам также может понравиться
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionОт EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionОценок пока нет
- Anlysis of U Girder Bridge DecksДокумент5 страницAnlysis of U Girder Bridge DecksFadhilah Muslim100% (1)
- Design Guide - AnalysisДокумент4 страницыDesign Guide - AnalysisDaniel Okere100% (1)
- NCHRP12-71 FRДокумент145 страницNCHRP12-71 FRRammiris ManОценок пока нет
- Concrete-Filled Steel Tube ColumnsДокумент26 страницConcrete-Filled Steel Tube ColumnsmehrdadОценок пока нет
- Finite Element Modeling of Concrete Beams Prestressed With External TendonsДокумент8 страницFinite Element Modeling of Concrete Beams Prestressed With External TendonsviniciusltОценок пока нет
- 1.the Structural Frame - ContdДокумент28 страниц1.the Structural Frame - ContdNaveen Bhari100% (2)
- 02 LoadRatingBasicsДокумент58 страниц02 LoadRatingBasicsRabi Shankar YadavaОценок пока нет
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОт EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОценок пока нет
- Multi-Span Prestressed Concrete Girder Bridges W CVRДокумент39 страницMulti-Span Prestressed Concrete Girder Bridges W CVRSony Jsd100% (1)
- Cable Stayed BackwardДокумент69 страницCable Stayed BackwardIonut FalcescuОценок пока нет
- Analysis and Comparative Study of Composite Bridge GirdersДокумент11 страницAnalysis and Comparative Study of Composite Bridge GirdersIAEME PublicationОценок пока нет
- Contech Bridge BrochureДокумент12 страницContech Bridge BrochureCONTECHCPIОценок пока нет
- 2002 FIB SegmentДокумент6 страниц2002 FIB SegmentPunithan PunithanОценок пока нет
- Marco RosignoliДокумент8 страницMarco RosignoliEd MateiОценок пока нет
- OTEC (Kanawha River Bridge) S WilliamsonДокумент59 страницOTEC (Kanawha River Bridge) S Williamsonstevewv100% (1)
- Composite Beams 2Документ38 страницComposite Beams 2Seifeldin Ali Marzouk100% (1)
- Caltrans Connection DesignДокумент22 страницыCaltrans Connection DesignAnanta GaikwadОценок пока нет
- Analysis and Design of Continuous Prestressed Concrete Bridge Based On Construction SequenceДокумент9 страницAnalysis and Design of Continuous Prestressed Concrete Bridge Based On Construction SequenceThaiAnhBoОценок пока нет
- Construction Control of The Yamen Cable-Stayed Bridge: Han Dajian Su ChengДокумент6 страницConstruction Control of The Yamen Cable-Stayed Bridge: Han Dajian Su Chengarindam1508Оценок пока нет
- Design of Deck For COMPLEX Concrete BridgeДокумент75 страницDesign of Deck For COMPLEX Concrete BridgeJunaid AminОценок пока нет
- Strut and Tie Models ACIДокумент13 страницStrut and Tie Models ACIRômulo Menck RomanichenОценок пока нет
- First Prs EditedДокумент38 страницFirst Prs EditedMathew SebastianОценок пока нет
- On Design of Retaining Walls in Seismic Areas PDFДокумент7 страницOn Design of Retaining Walls in Seismic Areas PDFSeif15Оценок пока нет
- LRFD Design Example Nº1. Prestressed Prescast Concrete Beam Bridge Design (MATLAB)Документ347 страницLRFD Design Example Nº1. Prestressed Prescast Concrete Beam Bridge Design (MATLAB)rapaigОценок пока нет
- Design Aids of Nu I Girder BridgesДокумент115 страницDesign Aids of Nu I Girder Bridgesheryanto555Оценок пока нет
- Construction Process of Segmental BridgesДокумент47 страницConstruction Process of Segmental BridgesmnsawantОценок пока нет
- Parametric Study On Reinforced Concrete Beam Using ANSYSДокумент8 страницParametric Study On Reinforced Concrete Beam Using ANSYSmiki156799Оценок пока нет
- Simple Bridges NicholsonДокумент94 страницыSimple Bridges Nicholsonfarhaad shaikОценок пока нет
- Transverse Analysis of Full-Scale Precast Segmental Box Girder Segments WithДокумент11 страницTransverse Analysis of Full-Scale Precast Segmental Box Girder Segments WithbistsushantОценок пока нет
- Transverse Post-Tensioning Design and Detailing of Precast Prestressed Concrete Adjacent-Box-Girder Bridges PDFДокумент15 страницTransverse Post-Tensioning Design and Detailing of Precast Prestressed Concrete Adjacent-Box-Girder Bridges PDFSanti CheewabantherngОценок пока нет
- COWIs International Bridge ProjectsДокумент45 страницCOWIs International Bridge ProjectsSteel_catОценок пока нет
- 07 0018 PDFДокумент148 страниц07 0018 PDFatman chanaОценок пока нет
- 2 Moment Distribution MethodДокумент37 страниц2 Moment Distribution MethodSuleiman Yusuf JibrilОценок пока нет
- Shear Lag EffectДокумент2 страницыShear Lag Effectmedhat145Оценок пока нет
- Guidelines For Design of Integral AbutmentsДокумент10 страницGuidelines For Design of Integral Abutmentsc1366Оценок пока нет
- Prestressed Concrete Bridge SuperstructuresДокумент18 страницPrestressed Concrete Bridge SuperstructuresVashdev100% (1)
- Analytical Approach of Anchor Rod Stiffness and Steel-Sap2000Документ24 страницыAnalytical Approach of Anchor Rod Stiffness and Steel-Sap2000Vladimir GuamanОценок пока нет
- Chapter 3 Direct Displacement Based DesignДокумент68 страницChapter 3 Direct Displacement Based DesignMuhammadNomanKОценок пока нет
- Owl's Cable-Stayed Bridge Handout PDFДокумент3 страницыOwl's Cable-Stayed Bridge Handout PDFAnonymous Uwj7UD7Оценок пока нет
- Poroelastic StructuresОт EverandPoroelastic StructuresG. CederbaumОценок пока нет
- Seismic Resistant Viaduct Design For The Taiwan High Speed Rail ProjectДокумент5 страницSeismic Resistant Viaduct Design For The Taiwan High Speed Rail ProjectAnonymous dWa1xtpKmfОценок пока нет
- SPDG + BridgeCor 2013Документ118 страницSPDG + BridgeCor 2013Marlongua100% (1)
- On The Buckling Behaviour of Knee Braced Frames (KBF)Документ8 страницOn The Buckling Behaviour of Knee Braced Frames (KBF)Ahmed GhadoosiОценок пока нет
- Integrated Approach To Concrete DesignДокумент64 страницыIntegrated Approach To Concrete DesignJason GuzmanОценок пока нет
- Shear Strength of Reinforced Concrete Beams Under Uniformly Distributed LoadsДокумент10 страницShear Strength of Reinforced Concrete Beams Under Uniformly Distributed LoadsMoataz M. M. Rizk100% (1)
- Precast Segmental Bridge ConstructionДокумент16 страницPrecast Segmental Bridge ConstructionAhmedОценок пока нет
- Shear Performance Analysis Tapered Beam-Resal PDFДокумент11 страницShear Performance Analysis Tapered Beam-Resal PDFp rОценок пока нет
- M54 Unit 2 Traffic Load On Highway Bridges BS5400-2Документ19 страницM54 Unit 2 Traffic Load On Highway Bridges BS5400-2Philip YapОценок пока нет
- Fatigue - Steel BridgesДокумент12 страницFatigue - Steel Bridgesimde2Оценок пока нет
- Cable StructuresДокумент13 страницCable StructuresManthan NaikОценок пока нет
- 06MCL004Документ56 страниц06MCL004api-19884175Оценок пока нет
- Cable BridgeДокумент132 страницыCable BridgecivilchandhranОценок пока нет
- Comparison Between Conventional Steel Structures and Tubular PDFДокумент5 страницComparison Between Conventional Steel Structures and Tubular PDFa duttaОценок пока нет
- Simplified Solution of Space Frame Structures.: Hayen, Charles LeoДокумент77 страницSimplified Solution of Space Frame Structures.: Hayen, Charles LeoJD OngОценок пока нет
- Budownictwo Zeszyt 1 B (11) 2015 7Документ12 страницBudownictwo Zeszyt 1 B (11) 2015 7EddySyahputraBenSyahrenОценок пока нет
- Putrajaya BridgeДокумент98 страницPutrajaya BridgeJD Ong100% (1)
- JKR BQДокумент19 страницJKR BQJD OngОценок пока нет
- Hospital Building Base IsolationДокумент32 страницыHospital Building Base IsolationJD OngОценок пока нет
- DownloadДокумент47 страницDownloadGajanVashishth100% (1)
- Asphalt Airfield PavementsДокумент28 страницAsphalt Airfield PavementsHamid NaveedОценок пока нет
- Technical Report 38-Patch Repair of Reinforced ConcreteДокумент87 страницTechnical Report 38-Patch Repair of Reinforced ConcreteJD Ong100% (1)
- Introduction To Structural Dynamics-BiggsДокумент178 страницIntroduction To Structural Dynamics-Biggsfierroe88% (8)
- Concrete DefectДокумент66 страницConcrete DefectJD Ong100% (1)
- Design Applications of Raft Foundations PDFДокумент642 страницыDesign Applications of Raft Foundations PDFSergio ChambiОценок пока нет
- Ill Conditioning PDFДокумент28 страницIll Conditioning PDFJD OngОценок пока нет
- Interior Arch Vs DesignДокумент9 страницInterior Arch Vs DesignAyesha MAhmoodОценок пока нет
- Marina Square II BrochureДокумент11 страницMarina Square II BrochureAbdul Rasyid Abdullah SebliОценок пока нет
- Exhibitors ListДокумент116 страницExhibitors ListAuras TechnologyОценок пока нет
- 6 Yazmin - Whc711 - Rumah Penghulu Abu SemanДокумент21 страница6 Yazmin - Whc711 - Rumah Penghulu Abu SemanNUR YAZMIN ABU HASSANОценок пока нет
- AL Alpha Essentials WebДокумент182 страницыAL Alpha Essentials WebVo Hong KietОценок пока нет
- Fire Wall DesignДокумент4 страницыFire Wall DesignIrshad KhanОценок пока нет
- Hot CrackingДокумент3 страницыHot CrackingFsОценок пока нет
- Construction and Building Materials: Abhishek Jain, Rajesh Gupta, Sandeep ChaudharyДокумент13 страницConstruction and Building Materials: Abhishek Jain, Rajesh Gupta, Sandeep ChaudharySchool of EngineersОценок пока нет
- StratosДокумент4 страницыStratosCelith Rossy Inga PeñaОценок пока нет
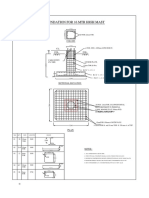
- High Mast Foundation Layout - DiagramДокумент8 страницHigh Mast Foundation Layout - DiagramTanveer Ahmad89% (9)
- Aci350 3 06Документ67 страницAci350 3 06juantovarОценок пока нет
- Insulation CalculationДокумент10 страницInsulation CalculationagazamiОценок пока нет
- HT200AF, 227AF HT300AF, 327AF HT400AF, 427AF HT500AF, 527AF: Owner 'S ManualДокумент24 страницыHT200AF, 227AF HT300AF, 327AF HT400AF, 427AF HT500AF, 527AF: Owner 'S ManualFidelОценок пока нет
- General Requirements For Alloy and Stainless Steel PipeДокумент11 страницGeneral Requirements For Alloy and Stainless Steel PipeCesar BernalОценок пока нет
- Workshop Manual Citea DAF Euro-5 EnglezaДокумент466 страницWorkshop Manual Citea DAF Euro-5 EnglezaIgor NistorОценок пока нет
- Steel Tanks For Fire ProtectionДокумент21 страницаSteel Tanks For Fire ProtectionCkaal74Оценок пока нет
- Monitoring Backlog New 2021 InfrastrukturДокумент2 страницыMonitoring Backlog New 2021 InfrastrukturKhairullahОценок пока нет
- Innova M3 New: 3. InstallationДокумент8 страницInnova M3 New: 3. InstallationAndreea DanielaОценок пока нет
- Design of Aspects of CC Roads PDFДокумент12 страницDesign of Aspects of CC Roads PDFviharikapavuluri1290100% (1)
- Camden Central Community UmbrellaДокумент98 страницCamden Central Community UmbrellaTom YoungОценок пока нет
- Toda Hut: Vernacular ArchitectureДокумент9 страницToda Hut: Vernacular ArchitectureKrittikaОценок пока нет
- Ground Source Heating and CoolingДокумент25 страницGround Source Heating and CoolingAnuj Reddy100% (1)
- Indeterminate StrussДокумент44 страницыIndeterminate StrussMohan NaikОценок пока нет
- 2010 10 06 CB SootblowingSolutions v01Документ67 страниц2010 10 06 CB SootblowingSolutions v01Batregzen Khayankhyarvaa100% (3)
- Design, Analysis and Comparison of Underground Rectangular Water Tank by Using STAAD Provi8 SoftwareДокумент6 страницDesign, Analysis and Comparison of Underground Rectangular Water Tank by Using STAAD Provi8 SoftwareNitin shepurОценок пока нет
- 3-Typical Upgrade Trash RackДокумент1 страница3-Typical Upgrade Trash RackRodelio Aboda Jr.Оценок пока нет
- New QTJ4-40B2 Production Line PDFДокумент7 страницNew QTJ4-40B2 Production Line PDFTwokir A. TomalОценок пока нет
- Rough CostДокумент1 страницаRough CostKannanОценок пока нет
- Train Embankment Loads in DeepEXДокумент8 страницTrain Embankment Loads in DeepEXM Sajid IqbalОценок пока нет
- 49.bolt Transverse Double Shear CalculationДокумент7 страниц49.bolt Transverse Double Shear CalculationvenkateswaranОценок пока нет