Вам также может понравиться
- Air MusclesДокумент32 страницыAir MusclesMohammed ShahinОценок пока нет
- Air Muscle PresentationДокумент23 страницыAir Muscle PresentationNm5793Оценок пока нет
- Pneumatic Muscle Actuator Technology A Light Weight Power System ForДокумент18 страницPneumatic Muscle Actuator Technology A Light Weight Power System ForTalamburang AgungОценок пока нет
- Pneumatic-Driven Jumping RobotДокумент10 страницPneumatic-Driven Jumping RobotEnrikeAguilarОценок пока нет
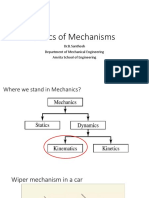
- Basics of Mechanisms: Dr.B.Santhosh Department of Mechanical Engineering Amrita School of EngineeringДокумент34 страницыBasics of Mechanisms: Dr.B.Santhosh Department of Mechanical Engineering Amrita School of Engineeringkishore sОценок пока нет
- FL Problem 8Документ10 страницFL Problem 8api-444550401Оценок пока нет
- Mahtab Ilyas Roll Number 16-ME - 170 Section B: Heat Engine Mechanical Work Steam Working FluidДокумент4 страницыMahtab Ilyas Roll Number 16-ME - 170 Section B: Heat Engine Mechanical Work Steam Working FluidMahtab IlyasОценок пока нет
- Robot StiquitoДокумент13 страницRobot StiquitojcvoscribОценок пока нет
- Robots Part Two, The Illusion of Life (Week Three)Документ34 страницыRobots Part Two, The Illusion of Life (Week Three)Vitor MacedoОценок пока нет
- Computational Analysis of A Inverted Double-Element Airfoil in Ground EffectДокумент9 страницComputational Analysis of A Inverted Double-Element Airfoil in Ground EffectVyssionОценок пока нет
- MachinesAndMechanisms - Advancing With Simple and Powered Machines - 1.0 - en US PDFДокумент186 страницMachinesAndMechanisms - Advancing With Simple and Powered Machines - 1.0 - en US PDFTudor MinascurtaОценок пока нет
- Automata Assembly Drawing v24Документ10 страницAutomata Assembly Drawing v24api-532527238Оценок пока нет
- Math Skills Pascals PrincipleДокумент4 страницыMath Skills Pascals PrincipleEllyn De chavezОценок пока нет
- Chap 4 FEA For Elastoplastic Problems: Nam-Ho KimДокумент146 страницChap 4 FEA For Elastoplastic Problems: Nam-Ho KimJib RanОценок пока нет
- Build A Pop-Pop Boat PDFДокумент7 страницBuild A Pop-Pop Boat PDFLuis UlakiaОценок пока нет
- Basic Design of Flying Wing ModelsДокумент32 страницыBasic Design of Flying Wing ModelsVignesh SelvarajОценок пока нет
- Intro To Wind Turbine TechnologyДокумент38 страницIntro To Wind Turbine Technologymayank singhОценок пока нет
- Sea Ray Owner's Manual: 270 Select EXДокумент126 страницSea Ray Owner's Manual: 270 Select EXMos WoraphonОценок пока нет
- MitsubishiДокумент300 страницMitsubishijuan_oliva_41Оценок пока нет
- Audemars Piguet Calibre 2908Документ16 страницAudemars Piguet Calibre 2908Simon LászlóОценок пока нет
- 1.1.1.A.VEX SimpleMachineInvestigationДокумент14 страниц1.1.1.A.VEX SimpleMachineInvestigationDivya Sureshkannan100% (2)
- LEGO TransformersДокумент30 страницLEGO Transformersايام زمانОценок пока нет
- Kinematic BasicДокумент138 страницKinematic BasicIshank Singh SandhuОценок пока нет
- A002M AutogyroДокумент7 страницA002M Autogyroolegprikhodko2809Оценок пока нет
- Make A Bench Power Supply Mostly From Recycled ParДокумент35 страницMake A Bench Power Supply Mostly From Recycled ParkukmastaОценок пока нет
- Crayon Puppet: Food Living Outside Play Technology WorkshopДокумент12 страницCrayon Puppet: Food Living Outside Play Technology Workshopnicole MenesОценок пока нет
- The Clockmakers AidДокумент4 страницыThe Clockmakers AidvanpatoОценок пока нет
- Antique Mechanic Al Computers (Byte 1978)Документ27 страницAntique Mechanic Al Computers (Byte 1978)Peeters GuyОценок пока нет
- Wen Ho Lee - Computer Simulation of Shaped Charge Problems-World Scientific Publishing Company (2006) PDFДокумент390 страницWen Ho Lee - Computer Simulation of Shaped Charge Problems-World Scientific Publishing Company (2006) PDFGavrila IonutОценок пока нет
- Sog PDFДокумент60 страницSog PDFshinobisefirotОценок пока нет
- The Incredible Anti-Gravity Double ConeДокумент4 страницыThe Incredible Anti-Gravity Double ConeSitaram Bettadpur100% (1)
- Oru Kayak PatentДокумент15 страницOru Kayak PatentWalter ThompsonОценок пока нет
- Electrostatic InductionДокумент25 страницElectrostatic InductionPraveen KumarОценок пока нет
- Kinetic Treats Manual EnglishДокумент18 страницKinetic Treats Manual EnglishJuan Carlos ManzanoОценок пока нет
- Atmospheric Boundary Layer Flows PDFДокумент304 страницыAtmospheric Boundary Layer Flows PDFkarolinesuellyОценок пока нет
- Roller Coaster ProjectsДокумент6 страницRoller Coaster ProjectsDustyC7100% (1)
- Catenary: This File Is From The 3D-Xploremath Project. Please See HTTP://RSP - Math.Brandeis - Edu/3D-Xplormath/Index - HTMLДокумент6 страницCatenary: This File Is From The 3D-Xploremath Project. Please See HTTP://RSP - Math.Brandeis - Edu/3D-Xplormath/Index - HTMLHyunkyoun JinОценок пока нет
- ServoMagazine 12-2003Документ80 страницServoMagazine 12-2003Aldo RodriguezОценок пока нет
- Exam QuestionsДокумент11 страницExam QuestionsAmit MondalОценок пока нет
- Clark Y Airfoil PDFДокумент1 страницаClark Y Airfoil PDFAziz Fahrur50% (2)
- Led Cube 8x8x8Документ82 страницыLed Cube 8x8x8Doughboy!Оценок пока нет
- A Review of Free-Piston Engine History and Applications.Документ16 страницA Review of Free-Piston Engine History and Applications.Thulasi RamОценок пока нет
- Leaf Spring Design and EngineeringДокумент4 страницыLeaf Spring Design and EngineeringAnonymous YkDJkSqОценок пока нет
- KadenancyEffectAcousticalResonanceEffectValveless Camera ReadyДокумент9 страницKadenancyEffectAcousticalResonanceEffectValveless Camera ReadyAnonymous oyUAtpKОценок пока нет
- Space Technology Section-A, Module - 1, Lecture-2: 1.2 Thrust From A Stationary Rocket Engine / MotorДокумент7 страницSpace Technology Section-A, Module - 1, Lecture-2: 1.2 Thrust From A Stationary Rocket Engine / MotorSid Siddapa SidhuОценок пока нет
- Me 433 BookДокумент511 страницMe 433 BookpizzweОценок пока нет
- HK 450Документ31 страницаHK 450Julian PascuОценок пока нет
- R/C Soaring Digest - Apr 2007Документ44 страницыR/C Soaring Digest - Apr 2007Aviation/Space History LibraryОценок пока нет
- 2009 Van's RV Tool Catalog: The Number One Choice of RV Aircraft BuildersДокумент27 страниц2009 Van's RV Tool Catalog: The Number One Choice of RV Aircraft BuildersLevent ÖnderОценок пока нет
- Electronics: Physics-MC/Electronics/By Lee Siu Hin Page 1 of 11Документ11 страницElectronics: Physics-MC/Electronics/By Lee Siu Hin Page 1 of 11eltytanОценок пока нет
- Lab 3c Creo 12123654Документ2 страницыLab 3c Creo 12123654neeraj kumar100% (1)
- AutomataДокумент8 страницAutomataDedyAjiRiyadiОценок пока нет
- Beginners Guide To Connecting Your RC Plane Electr PDFДокумент11 страницBeginners Guide To Connecting Your RC Plane Electr PDFMehroos AliОценок пока нет
- Fig No 1.1: Air Muscle: Department of Mechanical Engineering, KLESCETДокумент21 страницаFig No 1.1: Air Muscle: Department of Mechanical Engineering, KLESCETSudhindraHarihar100% (1)
- Air MuscleДокумент22 страницыAir Musclesudeep9666Оценок пока нет
- Muscles Riupeeec 2006Документ6 страницMuscles Riupeeec 2006ioa7Оценок пока нет
- 2004-Michael B. Pritts-Design of An Artificial Muscle Continuum RobotДокумент5 страниц2004-Michael B. Pritts-Design of An Artificial Muscle Continuum Robotitm.ggwpОценок пока нет
- Shock AbsorberДокумент6 страницShock AbsorberZinedine ZidaneeОценок пока нет
- 0124 WeB04 5Документ6 страниц0124 WeB04 5julfo05Оценок пока нет
- Intel Overclocking GuideДокумент36 страницIntel Overclocking Guidemohit616Оценок пока нет
- HovercraftsДокумент4 страницыHovercraftsmohit616Оценок пока нет
- Product Quality. A Guide For Small and Medium-Sized EnterprisesДокумент56 страницProduct Quality. A Guide For Small and Medium-Sized EnterprisesNedzminaОценок пока нет
- ASME Product Development CycleДокумент36 страницASME Product Development CycleGeetika GulyaniОценок пока нет
- Polycab Wires PVT LTD: HT Xlpe CablesДокумент18 страницPolycab Wires PVT LTD: HT Xlpe Cablesmohit616Оценок пока нет
- Presentation Cables 2006 - RTM & RDW Graph Vs PictДокумент39 страницPresentation Cables 2006 - RTM & RDW Graph Vs Pictmohit616Оценок пока нет
- Calculus Ibsl QsДокумент7 страницCalculus Ibsl QsfarahОценок пока нет
- Getting A Good Fit: Selecting The Right Shaft and Housing ToleranceДокумент2 страницыGetting A Good Fit: Selecting The Right Shaft and Housing Toleranceeng13Оценок пока нет
- BEeM 101.01Документ34 страницыBEeM 101.01Anonymous I8nZsDqlmh100% (1)
- RometBrochure PDFДокумент20 страницRometBrochure PDFalexrm12Оценок пока нет
- Heat Transfer RadiationДокумент7 страницHeat Transfer RadiationJerico MikesellОценок пока нет
- Identification of Acrylate Copolymers Using Pyrolysis and Gas ChromatographyДокумент5 страницIdentification of Acrylate Copolymers Using Pyrolysis and Gas ChromatographyKate KlopfensteinОценок пока нет
- Chương 1 - Bài TậpДокумент25 страницChương 1 - Bài TậpTÍN Phạm Nguyễn TrọngОценок пока нет
- Qafco 5 RG BoilerДокумент156 страницQafco 5 RG BoilerfakhanОценок пока нет
- HydrographДокумент42 страницыHydrographRahat ullahОценок пока нет
- CP504Lecture - 06 - OK (Enzyme Reactor Design)Документ12 страницCP504Lecture - 06 - OK (Enzyme Reactor Design)Yurri Hutami ZarraОценок пока нет
- IJM Calculation For Lift Lobby (Fire Lift)Документ6 страницIJM Calculation For Lift Lobby (Fire Lift)MFaiz RHamiraОценок пока нет
- United States Patent (191 (11) Patent Number: 5,270,023: May Et A1. (45) Date of Patent: Dec. 14, 1993Документ8 страницUnited States Patent (191 (11) Patent Number: 5,270,023: May Et A1. (45) Date of Patent: Dec. 14, 1993Yustinus Selis ToronОценок пока нет
- Heat Transfer Excel Calculations 1Документ39 страницHeat Transfer Excel Calculations 1Sharon LambertОценок пока нет
- DifferentialEquations 02 Strain Disp Eqns 2Документ8 страницDifferentialEquations 02 Strain Disp Eqns 2lipun12ka4Оценок пока нет
- ESI MS AdductsДокумент5 страницESI MS AdductsSeet TohОценок пока нет
- Load ModelingДокумент14 страницLoad ModelingTouseef Hussain100% (1)
- 5.soil Physic - Mechanical Properties TableДокумент8 страниц5.soil Physic - Mechanical Properties TablebsavaticОценок пока нет
- Fatigue Analysis For Fixed Platforms PDFДокумент13 страницFatigue Analysis For Fixed Platforms PDFm_ilahi9296Оценок пока нет
- SNV2007 Karine Savreux 22Документ10 страницSNV2007 Karine Savreux 22Erwin Paulian SihombingОценок пока нет
- Design of Concrete Airport PavementДокумент64 страницыDesign of Concrete Airport Pavementaeroalan100% (4)
- Dr. Siti Mariam Binti Abdul Rahman Faculty of Mechanical Engineering Office: T1-A14-12C E-Mail: Mariam4528@salam - Uitm.edu - MyДокумент8 страницDr. Siti Mariam Binti Abdul Rahman Faculty of Mechanical Engineering Office: T1-A14-12C E-Mail: Mariam4528@salam - Uitm.edu - MyahmadОценок пока нет
- Colorimeter 1Документ2 страницыColorimeter 1Eng CirroОценок пока нет
- Flyer - Boiler Water Conductivity SensorДокумент2 страницыFlyer - Boiler Water Conductivity SensorpcrateroОценок пока нет
- Shahin Internship Report On Non-Destructive Testing in Saj Engineering and Trading CompanyДокумент127 страницShahin Internship Report On Non-Destructive Testing in Saj Engineering and Trading CompanyShahin Manjurul AlamОценок пока нет
- Capítulo 5 - Micelas Poliméricas para Encapsulación, Vectorización y Cesión de FármacosДокумент37 страницCapítulo 5 - Micelas Poliméricas para Encapsulación, Vectorización y Cesión de FármacosJessica RomeroОценок пока нет
- 2018 - Electrostatic Precipitator Power Supply - A Review PDFДокумент6 страниц2018 - Electrostatic Precipitator Power Supply - A Review PDFMahlatse MarabaОценок пока нет
- 6 4rate of Plate MovementДокумент5 страниц6 4rate of Plate Movementapi-245872444Оценок пока нет
- Chapter 6 TestДокумент5 страницChapter 6 TesthelloblargОценок пока нет
- Kaddour Najim Control of Continuous Linear SystemsДокумент11 страницKaddour Najim Control of Continuous Linear SystemsChrislei RizzattiОценок пока нет
- Chapter 38 Magnetism and Electromagnetism: EXERCISE 177, Page 401Документ5 страницChapter 38 Magnetism and Electromagnetism: EXERCISE 177, Page 401RickyОценок пока нет
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseОт EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseРейтинг: 4.5 из 5 звезд4.5/5 (51)
- To Engineer Is Human: The Role of Failure in Successful DesignОт EverandTo Engineer Is Human: The Role of Failure in Successful DesignРейтинг: 4 из 5 звезд4/5 (138)
- The Laws of Thermodynamics: A Very Short IntroductionОт EverandThe Laws of Thermodynamics: A Very Short IntroductionРейтинг: 4.5 из 5 звезд4.5/5 (10)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansОт EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansОценок пока нет
- Crossings: How Road Ecology Is Shaping the Future of Our PlanetОт EverandCrossings: How Road Ecology Is Shaping the Future of Our PlanetРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionОт EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AОт EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AОценок пока нет
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedОт EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedРейтинг: 5 из 5 звезд5/5 (1)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideОт Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideРейтинг: 3.5 из 5 звезд3.5/5 (7)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisОт EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisРейтинг: 4 из 5 звезд4/5 (2)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОт EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОценок пока нет
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CОт EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CОценок пока нет
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchОт EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchРейтинг: 4 из 5 звезд4/5 (10)
- Mechanical Vibrations and Condition MonitoringОт EverandMechanical Vibrations and Condition MonitoringРейтинг: 5 из 5 звезд5/5 (1)
- The Great Bridge: The Epic Story of the Building of the Brooklyn BridgeОт EverandThe Great Bridge: The Epic Story of the Building of the Brooklyn BridgeРейтинг: 4.5 из 5 звезд4.5/5 (59)
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyОт EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyРейтинг: 5 из 5 звезд5/5 (1)