Вам также может понравиться
- European Journal of Operational Research: Çerag Pinçe, Rommert DekkerДокумент13 страницEuropean Journal of Operational Research: Çerag Pinçe, Rommert DekkerYanuar SiscariaОценок пока нет
- An Inventory Control System For Spare Parts at A RefinerДокумент32 страницыAn Inventory Control System For Spare Parts at A RefinerJubzJibz KamonchanokОценок пока нет
- Eoq ThesisДокумент4 страницыEoq Thesisdngw6ed6100% (1)
- An Inventory Control Project in A MajorДокумент34 страницыAn Inventory Control Project in A Majorfaisal jawadОценок пока нет
- How To Benefit From Order Data Correlated Dispersed Storage Assignment in Robotic WarehousesДокумент21 страницаHow To Benefit From Order Data Correlated Dispersed Storage Assignment in Robotic WarehousesAK RОценок пока нет
- Management Science: On The Benefits of Pooling in Production-Inventory SystemsДокумент18 страницManagement Science: On The Benefits of Pooling in Production-Inventory SystemsZulmy Ikhsan WОценок пока нет
- An Inventory Sharing and Allocation Method For A Multi-Location Service Parts Logistics Network With Time-Based Service LevelsДокумент15 страницAn Inventory Sharing and Allocation Method For A Multi-Location Service Parts Logistics Network With Time-Based Service LevelsViola Rosa Diaz VieraОценок пока нет
- Suministro de Repuestos Basado en CondicionДокумент9 страницSuministro de Repuestos Basado en CondicionDaniel Carvajal TinocoОценок пока нет
- Info SharingДокумент22 страницыInfo Sharingamostan27Оценок пока нет
- Mathematical and Computer Modelling: K.P. Sapna Isotupa, S.K. SamantaДокумент11 страницMathematical and Computer Modelling: K.P. Sapna Isotupa, S.K. SamantaDiegoorva A. OVОценок пока нет
- Working Paper Series: Inventory Management in A Consumer Electronics Closed-Loop Supply ChainДокумент37 страницWorking Paper Series: Inventory Management in A Consumer Electronics Closed-Loop Supply ChainSarabjot SinghОценок пока нет
- Using Computer Simulation To Reduce Supply Chain Cycle Time: Executive SummaryДокумент10 страницUsing Computer Simulation To Reduce Supply Chain Cycle Time: Executive SummaryAmrik SinghОценок пока нет
- Li2008 PDFДокумент10 страницLi2008 PDFSathyanarayana A Engineering MechanicalОценок пока нет
- Msom InventInventory Pooling To Deliver Differentiated Serviceory Pooling InformalДокумент30 страницMsom InventInventory Pooling To Deliver Differentiated Serviceory Pooling InformalmarcelojscostaОценок пока нет
- On The Use of Break Quantities in Multi (Echelon Dis-Tribution SystemsДокумент17 страницOn The Use of Break Quantities in Multi (Echelon Dis-Tribution SystemspostscriptОценок пока нет
- Accepted Manuscript: Computers & Industrial EngineeringДокумент53 страницыAccepted Manuscript: Computers & Industrial EngineeringRisma IrwanieОценок пока нет
- Design and Control of Warehouse Order Picking A Literature ReviewДокумент33 страницыDesign and Control of Warehouse Order Picking A Literature Reviewahk87Оценок пока нет
- Inventory ControlДокумент41 страницаInventory ControlantoniobhОценок пока нет
- Part One - Basic Inventory Concepts The Context of Inventory Control The Importance of InventoryДокумент14 страницPart One - Basic Inventory Concepts The Context of Inventory Control The Importance of Inventorybaviskarvs123Оценок пока нет
- MaproДокумент48 страницMaproRushikesh JagtapОценок пока нет
- 07408179908969874Документ13 страниц07408179908969874tradagОценок пока нет
- Integrated Lot Sizing in Serial Supply Chains With Production CapacitiesДокумент16 страницIntegrated Lot Sizing in Serial Supply Chains With Production CapacitiesJosé Luis RamírezОценок пока нет
- Model Multi EchelonДокумент13 страницModel Multi EchelonLalit KhandelwalОценок пока нет
- A Joint Location-Inventory Model: Zuo-Jun Max Shen - Collette Coullard - Mark S. DaskinДокумент16 страницA Joint Location-Inventory Model: Zuo-Jun Max Shen - Collette Coullard - Mark S. Daskina_classic2010Оценок пока нет
- Production Capacities-1Документ16 страницProduction Capacities-1Kamila ZarateОценок пока нет
- Ijiec 2020 25Документ14 страницIjiec 2020 25ajid kosОценок пока нет
- Forecasting of Demand Using ARIMA ModelДокумент9 страницForecasting of Demand Using ARIMA Modelmuhammad satriawanОценок пока нет
- Production Scheduling by Reachability Analysis - A Case StudyДокумент7 страницProduction Scheduling by Reachability Analysis - A Case StudyIrzum Bin MansoorОценок пока нет
- A Sampling-Based Matheuristic For The Continuous-Time Stochastic Inventoryrouting Problem With Time-WindowsДокумент15 страницA Sampling-Based Matheuristic For The Continuous-Time Stochastic Inventoryrouting Problem With Time-WindowsYenny Kristhel Solorzano VergaraОценок пока нет
- Multi-Commodity Warehouse PlanningДокумент15 страницMulti-Commodity Warehouse PlanningAndresMartinez28Оценок пока нет
- A Decision Support System To Determine The Stock Positions and Targets in The SemiconductorДокумент81 страницаA Decision Support System To Determine The Stock Positions and Targets in The Semiconductor孫ウィーユОценок пока нет
- Fuzzy Estimations and System Dynamics For Improving Supply ChainsДокумент13 страницFuzzy Estimations and System Dynamics For Improving Supply ChainsJavier Enrique Mantilla RosasОценок пока нет
- Interfaces 1979Документ8 страницInterfaces 1979bhataishwarya6Оценок пока нет
- AMM SarkerДокумент12 страницAMM SarkerlesanОценок пока нет
- A Comprehensive Survey of Guaranteed-Service Models For Multi-Echelon Inventory OptimizationДокумент57 страницA Comprehensive Survey of Guaranteed-Service Models For Multi-Echelon Inventory Optimization刘向阳Оценок пока нет
- Production CapacitiesДокумент15 страницProduction CapacitiesJuvenal Córdoba ValoyesОценок пока нет
- Inventory Management-Nishi KantrДокумент53 страницыInventory Management-Nishi KantrNishi KantОценок пока нет
- Impact of Inventory Inaccuracy On Service-Level Quality of A Multiproduct Production Line With Product PrioritiesДокумент7 страницImpact of Inventory Inaccuracy On Service-Level Quality of A Multiproduct Production Line With Product PrioritiesAli MohsinОценок пока нет
- Ahmed Taha Paper1Документ9 страницAhmed Taha Paper1Mohamed KhalilОценок пока нет
- Impact of Required Storage Space On Storage Policy Performance in A Unit-Load WarehouseДокумент15 страницImpact of Required Storage Space On Storage Policy Performance in A Unit-Load WarehouseHo Van RoiОценок пока нет
- Integrated Inventory and Transportation Mode Selection: A Service Parts Logistics SystemДокумент19 страницIntegrated Inventory and Transportation Mode Selection: A Service Parts Logistics Systemmasalac543Оценок пока нет
- Impact of Just-In-Time Inventory Systems On OEM Suppliers: Imds 106,2Документ18 страницImpact of Just-In-Time Inventory Systems On OEM Suppliers: Imds 106,2newview111Оценок пока нет
- Assembly Line Balancing Literature ReviewДокумент5 страницAssembly Line Balancing Literature Reviewaflstquqx100% (1)
- Theory of Inventory Management Based On Demand ForecastingДокумент10 страницTheory of Inventory Management Based On Demand ForecastingJimmy Jamero Jr.Оценок пока нет
- Alp Huh Tan WP 13 - MSOMДокумент37 страницAlp Huh Tan WP 13 - MSOMAbhinavHarshalОценок пока нет
- An Inventory-Location Model with Working and Safety Stock CostsДокумент32 страницыAn Inventory-Location Model with Working and Safety Stock CostsEduardo GonzálezОценок пока нет
- Inventory Control in Closed Loop Supply Chain Using System DynamicsДокумент33 страницыInventory Control in Closed Loop Supply Chain Using System DynamicsAritra SenОценок пока нет
- Managing Warehouse Systems EfficientlyДокумент8 страницManaging Warehouse Systems EfficientlyTeralMillosVanegasMoralesОценок пока нет
- Divergent System KokДокумент29 страницDivergent System KokkpmgadvisoryОценок пока нет
- A SHIP Inventory Routing Problem with Heterogeneous VehiclesДокумент7 страницA SHIP Inventory Routing Problem with Heterogeneous Vehiclespablo reyesОценок пока нет
- Solution Manual For Designing and Managing The Supply Chain 3rd Edition by David Simchi LeviДокумент5 страницSolution Manual For Designing and Managing The Supply Chain 3rd Edition by David Simchi LeviRamswaroop Khichar100% (1)
- (F) IM For Multi ItemДокумент12 страниц(F) IM For Multi ItemThảo ĐoànОценок пока нет
- Skip To Main ContentДокумент15 страницSkip To Main ContentParth VedОценок пока нет
- References: Informs Management ScienceДокумент18 страницReferences: Informs Management ScienceFabian EstebanОценок пока нет
- Benefits of Multi-Stage Inventory Planning in Process IndustriesДокумент20 страницBenefits of Multi-Stage Inventory Planning in Process IndustriesSantosh NathanОценок пока нет
- Right To RepairДокумент9 страницRight To RepairmkyodaОценок пока нет
- Abacus Jr. Level 1Документ14 страницAbacus Jr. Level 1fgthyОценок пока нет
- Oxgang - WikipediaДокумент2 страницыOxgang - WikipediaBrayan Anderson Chumpen CarranzaОценок пока нет
- 01 Avionics PhilosophyДокумент20 страниц01 Avionics Philosophy郝帅Оценок пока нет
- SD-22 Diminishing Manufacturing Sources and Material ShortagesДокумент335 страницSD-22 Diminishing Manufacturing Sources and Material Shortagesv.allenОценок пока нет
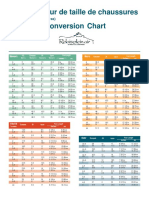
- Convertisseur de tailles de chaussures (en anglais et métriqueДокумент1 страницаConvertisseur de tailles de chaussures (en anglais et métriqueThhОценок пока нет
- Granite MeasuresДокумент1 страницаGranite MeasuresPrAsad ThanageОценок пока нет
- Dash 8 123 Technical Steering Committee (TSC) Call - March 1 2023 FinalДокумент52 страницыDash 8 123 Technical Steering Committee (TSC) Call - March 1 2023 Finalfernando he100% (1)
- Effective Communication Skills For Scientific and Technical Professionals PDFДокумент334 страницыEffective Communication Skills For Scientific and Technical Professionals PDFVikram SОценок пока нет
- Wide FlangeДокумент5 страницWide FlangeKusmayana NuryadiОценок пока нет
- R12 Enhancements CheatSheetДокумент5 страницR12 Enhancements CheatSheetssunils7Оценок пока нет
- 3BSE065503 C en DCS Life Cycle Parts ServicesДокумент16 страниц3BSE065503 C en DCS Life Cycle Parts Servicesjunges99Оценок пока нет
- Inventory Naragfxent and Review U P: Conceptual Framework LiteratureДокумент42 страницыInventory Naragfxent and Review U P: Conceptual Framework LiteratureBba AОценок пока нет
- SCM - Idc, G25Документ9 страницSCM - Idc, G25kuldeep singhОценок пока нет
- International Railway Industry StandardДокумент8 страницInternational Railway Industry StandardcarakooloОценок пока нет
- An Obsolescence Management FrameworkДокумент20 страницAn Obsolescence Management FrameworkJhoan Smith Chaves PeñaОценок пока нет
- A Framework For The Comprehensive Assessment of The Adaptive Reuse of Heritage Buildings in Historic CairoДокумент172 страницыA Framework For The Comprehensive Assessment of The Adaptive Reuse of Heritage Buildings in Historic CairoWaleed ShehataОценок пока нет
- FLETCHER, Kate. Durability, Fashion, Sustainability The Processes Ans Practices of Use, 2014.Документ18 страницFLETCHER, Kate. Durability, Fashion, Sustainability The Processes Ans Practices of Use, 2014.Nathy AlborghettiОценок пока нет
- Checklist - InventoriesДокумент12 страницChecklist - InventoriesdasharathdhageОценок пока нет
- 5 Inch 4 Feet in CMДокумент1 страница5 Inch 4 Feet in CMCindy YaoОценок пока нет
- JD Instrumentation TTBMДокумент7 страницJD Instrumentation TTBMManoj LakshmipathyОценок пока нет
- Dc590 Series: Confused With The 590+ (Plus) Drive That Is Still in ProductionДокумент4 страницыDc590 Series: Confused With The 590+ (Plus) Drive That Is Still in ProductionSumonta TanchangyaОценок пока нет
- Proactive Obsolescence Programme Manages Nuclear Plant EquipmentДокумент10 страницProactive Obsolescence Programme Manages Nuclear Plant Equipmentwaqar khanОценок пока нет
- ABB PLC Product Lifecycle ManagementДокумент2 страницыABB PLC Product Lifecycle ManagementKamitkumar Patel0% (1)
- Prevention of Skill ObsolescenceДокумент2 страницыPrevention of Skill Obsolescencesajid bhattiОценок пока нет
- Fashion CycleДокумент23 страницыFashion Cyclenavkaler151Оценок пока нет
- Marketing Environment FactorsДокумент16 страницMarketing Environment FactorsHalar KhanОценок пока нет
- Accounting procedures of army storesДокумент19 страницAccounting procedures of army storesSureshkumaryadavОценок пока нет
- Area Measurement Lenght MeasurementДокумент11 страницArea Measurement Lenght Measurementnadeem Uddin100% (1)
- Manual of Procedures On Procurement of Goods and ServicesДокумент138 страницManual of Procedures On Procurement of Goods and Servicesjejemonch100% (1)