Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Seminar Report On Voice MorphingДокумент36 страницSeminar Report On Voice MorphingNaresh MahorОценок пока нет
- Digital 6Документ20 страницDigital 6Anikk DasОценок пока нет
- Low Pass High Pass Filter Design (Yankee Bush Software LLC)Документ36 страницLow Pass High Pass Filter Design (Yankee Bush Software LLC)WhiteCrossesОценок пока нет
- DB1800AДокумент2 страницыDB1800AMario DeejayОценок пока нет
- Spectral Density EstimationДокумент8 страницSpectral Density Estimationvolly666Оценок пока нет
- Study of JPEG Image Compression Technique Using Discrete Cosine Transformation-93Документ4 страницыStudy of JPEG Image Compression Technique Using Discrete Cosine Transformation-93emspacet139Оценок пока нет
- Audio Mastering Secrets FREE PDFДокумент42 страницыAudio Mastering Secrets FREE PDFSid MccaffertyОценок пока нет
- Bab 6 - Rizqi Ramadhan - 171910201018Документ4 страницыBab 6 - Rizqi Ramadhan - 171910201018Rizqi RamadhanОценок пока нет
- Systems Response With Additional Poles and ZeroesДокумент26 страницSystems Response With Additional Poles and ZeroesHafiz Usman MahmoodОценок пока нет
- Medical Imaging Techniques Question BankДокумент5 страницMedical Imaging Techniques Question BankMATHANKUMAR.S100% (1)
- Laboratory Manual: Analogue and Digital Communication LabДокумент10 страницLaboratory Manual: Analogue and Digital Communication LabZain HaiderОценок пока нет
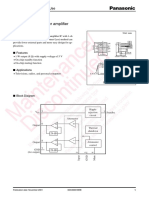
- An7511 PDFДокумент10 страницAn7511 PDFVenancio GutierrezОценок пока нет
- A4 STFTДокумент8 страницA4 STFTCao RuiОценок пока нет
- MXA N9020-90276 ReferenceДокумент312 страницMXA N9020-90276 ReferencescifiguyОценок пока нет
- Tabla de Números Romanos PDFДокумент7 страницTabla de Números Romanos PDFAriel Perez100% (1)
- High-Frequency Enhancement of Seismic Data by ReconvolutionДокумент13 страницHigh-Frequency Enhancement of Seismic Data by ReconvolutionMark RalphОценок пока нет
- Adaptive Histogram PDFДокумент8 страницAdaptive Histogram PDFBudi PurnomoОценок пока нет
- Mathematics of Difference of GaussiansДокумент3 страницыMathematics of Difference of GaussiansRajesh PaulОценок пока нет
- Lab 5 DTFTДокумент14 страницLab 5 DTFTZia UllahОценок пока нет
- Signals Sampling TheoremДокумент3 страницыSignals Sampling TheoremBhuvan Susheel MekaОценок пока нет
- Lab Activity No. 7 - Tuned Amplifiers With Gain ControlДокумент14 страницLab Activity No. 7 - Tuned Amplifiers With Gain ControlDavy JonesОценок пока нет
- Direct CodingДокумент5 страницDirect CodingAliyu SaniОценок пока нет
- Sampling TechniquesДокумент4 страницыSampling TechniquesPusp 220Оценок пока нет
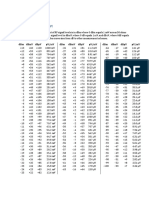
- Dbm Conversion Chart: Dbm Dbmv Dbμv Μv/Mv Dbm Dbmv Dbμv Μv/Mv Dbm Dbmv Dbμv Μv/MvДокумент1 страницаDbm Conversion Chart: Dbm Dbmv Dbμv Μv/Mv Dbm Dbmv Dbμv Μv/Mv Dbm Dbmv Dbμv Μv/Mvjose luisОценок пока нет
- Tokyo Dawn Labs - Kotelnikov ManualДокумент27 страницTokyo Dawn Labs - Kotelnikov ManualdemonclaenerОценок пока нет
- A New Inrush Current Detection Method For PDFДокумент14 страницA New Inrush Current Detection Method For PDFMilovan LukovacОценок пока нет
- Digital Signal ProcessingДокумент11 страницDigital Signal Processingaravind44555Оценок пока нет
- Everyday Math 4.1 Understanding DecimalsДокумент64 страницыEveryday Math 4.1 Understanding DecimalsAbdulrahman MohammedОценок пока нет
- Laplace Fourier RelationshipДокумент17 страницLaplace Fourier Relationshipnakasob100% (8)
- Yamaha Mg10xu Mg10 Mixing Console SMДокумент76 страницYamaha Mg10xu Mg10 Mixing Console SMaudio R3V3RS3Оценок пока нет