Вам также может понравиться
- Determining The Number of Clusters in A Data SetДокумент6 страницDetermining The Number of Clusters in A Data Setjohn949Оценок пока нет
- Exercise On Data Analysis Below Are 24 CasesДокумент6 страницExercise On Data Analysis Below Are 24 CasesAcua RioОценок пока нет
- Impact of Staff Training On Customer SatisfactionДокумент23 страницыImpact of Staff Training On Customer SatisfactionSahil BajracharyaОценок пока нет
- GDBSCANДокумент30 страницGDBSCANkkoushikgmailcomОценок пока нет
- Domaining by Clustering Multivariate Geostatistical DataДокумент12 страницDomaining by Clustering Multivariate Geostatistical DataKasse VarillasОценок пока нет
- Modularity Maximization in Networks by Variable Neighborhood SearchДокумент14 страницModularity Maximization in Networks by Variable Neighborhood SearchJohn ChoОценок пока нет
- Clustering XДокумент2 страницыClustering XMudit RanderОценок пока нет
- Ifsa Eusflat 2015 Submission 24Документ7 страницIfsa Eusflat 2015 Submission 24MuhammadWaqasNawazОценок пока нет
- S VD For ClusteringДокумент10 страницS VD For ClusteringLMОценок пока нет
- K-Means ClusteringДокумент16 страницK-Means ClusteringLUCKYОценок пока нет
- Analysis of Agglomerative ClusteringДокумент12 страницAnalysis of Agglomerative ClusteringBudianto Rinda PanglawaОценок пока нет
- Path Based Dissimilarity Measured For Thesis Book PreparationДокумент11 страницPath Based Dissimilarity Measured For Thesis Book PreparationKhin MyintОценок пока нет
- Analysis&Comparisonof Efficient TechniquesofДокумент5 страницAnalysis&Comparisonof Efficient TechniquesofasthaОценок пока нет
- The Others in The Cluster But With Differences Between ClustersДокумент5 страницThe Others in The Cluster But With Differences Between ClustersParth Hemant PurandareОценок пока нет
- The General Considerations and Implementation In: K-Means Clustering Technique: MathematicaДокумент10 страницThe General Considerations and Implementation In: K-Means Clustering Technique: MathematicaMario ZamoraОценок пока нет
- Algorithms For Model-Based Gaussian Hierarchical ClusteringДокумент16 страницAlgorithms For Model-Based Gaussian Hierarchical ClusteringDiana ArunОценок пока нет
- Kohonen Networks and Clustering: Comparative Performance in Color ClusteringДокумент9 страницKohonen Networks and Clustering: Comparative Performance in Color ClusteringDeybi Ypanaqué SilvaОценок пока нет
- 4 ClusteringДокумент9 страниц4 ClusteringBibek NeupaneОценок пока нет
- tmp9C3B TMPДокумент8 страницtmp9C3B TMPFrontiersОценок пока нет
- Consensus ClusteringДокумент7 страницConsensus Clusteringjohn949Оценок пока нет
- Create List Using RangeДокумент6 страницCreate List Using RangeYUKTA JOSHIОценок пока нет
- Genetic Algorithm-Based Clustering TechniqueДокумент11 страницGenetic Algorithm-Based Clustering TechniqueArmansyah BarusОценок пока нет
- An Efficient Enhanced K-Means Clustering AlgorithmДокумент8 страницAn Efficient Enhanced K-Means Clustering Algorithmahmed_fahim98Оценок пока нет
- A Famous Example of Cluster AnalysisДокумент5 страницA Famous Example of Cluster AnalysisVinit ShahОценок пока нет
- An Initial Seed Selection AlgorithmДокумент11 страницAn Initial Seed Selection Algorithmhamzarash090Оценок пока нет
- Data Clustering..Документ10 страницData Clustering..ArjunSahooОценок пока нет
- Cluster Analysis or Clustering Is The Art of Separating The Data Points Into Dissimilar Group With AДокумент11 страницCluster Analysis or Clustering Is The Art of Separating The Data Points Into Dissimilar Group With AramaabbidiОценок пока нет
- Ijcttjournal V1i1p12Документ3 страницыIjcttjournal V1i1p12surendiran123Оценок пока нет
- AgnesДокумент25 страницAgnesDyah Septi AndryaniОценок пока нет
- Assignment 2 With ProgramДокумент8 страницAssignment 2 With ProgramPalash SarowareОценок пока нет
- The Application of K-Medoids and PAM To The Clustering of RulesДокумент6 страницThe Application of K-Medoids and PAM To The Clustering of Rulesmoldova89Оценок пока нет
- Data MiningДокумент98 страницData MiningJijeesh BaburajanОценок пока нет
- On Clustering Using Random Walks: Abstract. We Propose A Novel Approach To Clustering, Based On DeterДокумент24 страницыOn Clustering Using Random Walks: Abstract. We Propose A Novel Approach To Clustering, Based On DeterBababa EkeОценок пока нет
- Analysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional DataДокумент5 страницAnalysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional Datasurendiran123Оценок пока нет
- Clustering High-Dimensional DataДокумент5 страницClustering High-Dimensional Datajohn949Оценок пока нет
- A Tutorial On Clustering AlgorithmsДокумент4 страницыA Tutorial On Clustering AlgorithmsjczernaОценок пока нет
- 3 Comparison-Of-Conventional-And-Rough-Kmeans-ClusteringДокумент8 страниц3 Comparison-Of-Conventional-And-Rough-Kmeans-ClusteringAnwar ShahОценок пока нет
- By Lior Rokach and Oded Maimon: Clustering MethodsДокумент5 страницBy Lior Rokach and Oded Maimon: Clustering MethodsRohit PaulОценок пока нет
- ML Unit VДокумент26 страницML Unit VPuli VilashОценок пока нет
- Chameleon PDFДокумент10 страницChameleon PDFAnonymous iIy4RsPCJ100% (1)
- Cluster Analysis BRM Session 14Документ25 страницCluster Analysis BRM Session 14akhil107043Оценок пока нет
- Video 18Документ17 страницVideo 18kamutmazОценок пока нет
- Advanced Cluster Analysis: Clustering High-Dimensional DataДокумент49 страницAdvanced Cluster Analysis: Clustering High-Dimensional DataPriyanka BhardwajОценок пока нет
- Lattin Et Al - Analyzing Multivariate Data - 281-283Документ3 страницыLattin Et Al - Analyzing Multivariate Data - 281-283vigneshОценок пока нет
- Tensor Decompositions For Learning Latent Variable Models: Mtelgars@cs - Ucsd.eduДокумент54 страницыTensor Decompositions For Learning Latent Variable Models: Mtelgars@cs - Ucsd.eduJohn KirkОценок пока нет
- Week-9-Part-2 Agglomerative ClusteringДокумент40 страницWeek-9-Part-2 Agglomerative ClusteringMichael ZewdieОценок пока нет
- Accepted Manuscript: Applied and Computational Harmonic AnalysisДокумент40 страницAccepted Manuscript: Applied and Computational Harmonic AnalysisMILLENIA WINADYA PUTRIОценок пока нет
- Ult SCH 94 BenchmarkДокумент14 страницUlt SCH 94 BenchmarkarshinОценок пока нет
- A Wavelet-Based Anytime Algorithm For K-Means Clustering of Time SeriesДокумент12 страницA Wavelet-Based Anytime Algorithm For K-Means Clustering of Time SeriesYaseen HussainОценок пока нет
- Entropy: A Clustering Method Based On The Maximum Entropy PrincipleДокумент30 страницEntropy: A Clustering Method Based On The Maximum Entropy PrincipleWafa BenzaouiОценок пока нет
- K-Means Clustering Clustering Algorithms Implementation and ComparisonДокумент4 страницыK-Means Clustering Clustering Algorithms Implementation and ComparisonFrankySaputraОценок пока нет
- Clustering With Shallow TreesДокумент17 страницClustering With Shallow TreespasomagaОценок пока нет
- A Novel Approach of Implementing An Optimal K-Means Plus Plus Algorithm For Scalar DataДокумент6 страницA Novel Approach of Implementing An Optimal K-Means Plus Plus Algorithm For Scalar DatasinigerskyОценок пока нет
- Concepts and Techniques: - Chapter 10Документ97 страницConcepts and Techniques: - Chapter 10sebpkyОценок пока нет
- Unit IV Cluster AnalysisДокумент7 страницUnit IV Cluster AnalysisAjit RautОценок пока нет
- Determination of The Number of Cluster A Priori Using A K-Means AlgorithmДокумент3 страницыDetermination of The Number of Cluster A Priori Using A K-Means AlgorithmerpublicationОценок пока нет
- DistanciasДокумент25 страницDistanciasCésar GarciaОценок пока нет
- 14 Aos1260Документ31 страница14 Aos1260Swapnaneel BhattacharyyaОценок пока нет
- 10 Clus BasicДокумент92 страницы10 Clus BasicMike KuОценок пока нет
- Chapter 10 Exercise Solutions: PM N F MNMP FДокумент27 страницChapter 10 Exercise Solutions: PM N F MNMP FHitesh RawatОценок пока нет
- Final Project - CS181Документ3 страницыFinal Project - CS181HoavantranОценок пока нет
- Business Intelligence: Coursework 2 M00678748Документ19 страницBusiness Intelligence: Coursework 2 M00678748Lyfe A1Оценок пока нет
- HR 1Документ5 страницHR 1Goutam BiswasОценок пока нет
- Survival Analysis. Techniques For Censored and Truncated Data (2Nd Ed.)Документ3 страницыSurvival Analysis. Techniques For Censored and Truncated Data (2Nd Ed.)irsadОценок пока нет
- An Exploratory Data Analysis For Loan Prediction Based On Nature of The ClientsДокумент4 страницыAn Exploratory Data Analysis For Loan Prediction Based On Nature of The ClientsKanavОценок пока нет
- Internship Report FormatДокумент4 страницыInternship Report FormatmorsybmОценок пока нет
- Chap15 Demand Management and ForecastingДокумент51 страницаChap15 Demand Management and ForecastingRanbir KapoorОценок пока нет
- Assignment Week 9-QuestionsДокумент3 страницыAssignment Week 9-QuestionsRetno Ajeng Anissa WidiatriОценок пока нет
- Chapter 4 - Focus Group Discussion (Part 2)Документ83 страницыChapter 4 - Focus Group Discussion (Part 2)Md. Golam MostofaОценок пока нет
- TableauДокумент23 страницыTableaugtm hostОценок пока нет
- Senior Data Scientist - Pratikkumar Girishbhai PatelДокумент4 страницыSenior Data Scientist - Pratikkumar Girishbhai PatelAyush JatpuriyaОценок пока нет
- Nutrition Status Affects High School Students Achievement: A Massive Prospective Cohort Study at Sleman, Yogyakarta-IndonesiaДокумент4 страницыNutrition Status Affects High School Students Achievement: A Massive Prospective Cohort Study at Sleman, Yogyakarta-IndonesiaAvinda BawoleОценок пока нет
- BA7108 Written CommunicationДокумент5 страницBA7108 Written CommunicationamanОценок пока нет
- Analysis of Current Market of Dairy Products in HORECA With Special Reference To Parag and AmulДокумент68 страницAnalysis of Current Market of Dairy Products in HORECA With Special Reference To Parag and Amulrohan royОценок пока нет
- Tutorial 2 InstructionДокумент3 страницыTutorial 2 InstructionFrancis SAIPIOHОценок пока нет
- Marketing Information SystemДокумент36 страницMarketing Information SystemMalik MohamedОценок пока нет
- PracticalresearchДокумент26 страницPracticalresearchEinsteinAng-og, Claire Y.Оценок пока нет
- Free Trade Area of Kenyir LakeДокумент79 страницFree Trade Area of Kenyir LakeTemuhaTeza0% (2)
- Excel WorkДокумент7 страницExcel WorkaramboooОценок пока нет
- It6006 Data Analytics SyllabusДокумент1 страницаIt6006 Data Analytics SyllabusjothiОценок пока нет
- Manual For The Preparation and Implementation of Basic Plans PDFДокумент93 страницыManual For The Preparation and Implementation of Basic Plans PDFHeitor Rodal100% (1)
- Solution Manual For Using Econometrics A Practical Guide 6 e 6th Edition A H StudenmundДокумент5 страницSolution Manual For Using Econometrics A Practical Guide 6 e 6th Edition A H StudenmundBenjamin Marchitto100% (39)
- Statistical Analysis With Software Application Lesson 4Документ2 страницыStatistical Analysis With Software Application Lesson 4Arj Sulit Centino DaquiОценок пока нет
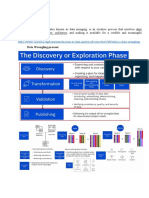
- Data Wrangling, Also Known As Data Munging, Is An Iterative Process That Involves DataДокумент9 страницData Wrangling, Also Known As Data Munging, Is An Iterative Process That Involves DataAlexandrina LikovaОценок пока нет
- AbawiДокумент14 страницAbawiYizhou WuОценок пока нет
- Assessment 3 BriefДокумент4 страницыAssessment 3 BriefSharwan KumawatОценок пока нет
- Chap8 Basic Cluster AnalysisДокумент98 страницChap8 Basic Cluster AnalysisRaven LawОценок пока нет