Вам также может понравиться
- International Journal of Distributed and Parallel SystemsДокумент2 страницыInternational Journal of Distributed and Parallel SystemsijdpsОценок пока нет
- International Journal of Distributed and Parallel Systems (IJDPS)Документ2 страницыInternational Journal of Distributed and Parallel Systems (IJDPS)ijdpsОценок пока нет
- International Journal of Distributed and Parallel SystemsДокумент2 страницыInternational Journal of Distributed and Parallel SystemsijdpsОценок пока нет
- International Journal of Distributed and Parallel SystemsДокумент2 страницыInternational Journal of Distributed and Parallel SystemsijdpsОценок пока нет
- International Journal of Distributed and Parallel SystemsДокумент2 страницыInternational Journal of Distributed and Parallel SystemsijdpsОценок пока нет
- Advanced Computational Intelligence: An International Journal (ACII)Документ1 страницаAdvanced Computational Intelligence: An International Journal (ACII)acii journalОценок пока нет
- Call For Papers - Vinternational Journal of Distributed and Parallel Systems (IJDPS)Документ2 страницыCall For Papers - Vinternational Journal of Distributed and Parallel Systems (IJDPS)ijdpsОценок пока нет
- International Journal of Distributed and Parallel SystemsДокумент2 страницыInternational Journal of Distributed and Parallel SystemsijdpsОценок пока нет
- IJDPSДокумент2 страницыIJDPSijdpsОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- SXV RXV ChassisДокумент239 страницSXV RXV Chassischili_s16Оценок пока нет
- Caso Estudio: Reliability Analysis of Power Distribution System. A Case StudyДокумент6 страницCaso Estudio: Reliability Analysis of Power Distribution System. A Case StudyCarlos HernandezОценок пока нет
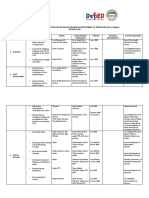
- Pontevedra 1 Ok Action PlanДокумент5 страницPontevedra 1 Ok Action PlanGemma Carnecer Mongcal50% (2)
- Garments Costing Sheet of LADIES Skinny DenimsДокумент1 страницаGarments Costing Sheet of LADIES Skinny DenimsDebopriya SahaОценок пока нет
- Durability of Prestressed Concrete StructuresДокумент12 страницDurability of Prestressed Concrete StructuresMadura JobsОценок пока нет
- DevOps Reference CardДокумент2 страницыDevOps Reference CardIntizarchauhanОценок пока нет
- Needle BasicsДокумент31 страницаNeedle BasicsARYAN RATHOREОценок пока нет
- Waswere Going To Waswere Supposed ToДокумент2 страницыWaswere Going To Waswere Supposed ToMilena MilacicОценок пока нет
- What Are The Advantages and Disadvantages of UsingДокумент4 страницыWhat Are The Advantages and Disadvantages of UsingJofet Mendiola88% (8)
- Model Answer Winter 2015Документ38 страницModel Answer Winter 2015Vivek MalwadeОценок пока нет
- Channel & Lomolino 2000 Ranges and ExtinctionДокумент3 страницыChannel & Lomolino 2000 Ranges and ExtinctionKellyta RodriguezОценок пока нет
- English 2nd Quarter Week 7 Connotation DenotationДокумент28 страницEnglish 2nd Quarter Week 7 Connotation DenotationEdward Estrella GuceОценок пока нет
- Anviz T5 RFID ManualДокумент52 страницыAnviz T5 RFID ManualLuis Felipe Olaya SandovalОценок пока нет
- ATS2017 ProspectusДокумент13 страницATS2017 ProspectusGiri WakshanОценок пока нет
- Navi-Planner User ManualДокумент331 страницаNavi-Planner User ManualRichard KershawОценок пока нет
- Sickle Cell DiseaseДокумент10 страницSickle Cell DiseaseBrooke2014Оценок пока нет
- BKNC3 - Activity 1 - Review ExamДокумент3 страницыBKNC3 - Activity 1 - Review ExamDhel Cahilig0% (1)
- Strategic Capital Management: Group - 4 Jahnvi Jethanandini Shreyasi Halder Siddhartha Bayye Sweta SarojДокумент5 страницStrategic Capital Management: Group - 4 Jahnvi Jethanandini Shreyasi Halder Siddhartha Bayye Sweta SarojSwetaSarojОценок пока нет
- India Biotech Handbook 2023Документ52 страницыIndia Biotech Handbook 2023yaduraj TambeОценок пока нет
- The Beauty of Laplace's Equation, Mathematical Key To Everything - WIRED PDFДокумент9 страницThe Beauty of Laplace's Equation, Mathematical Key To Everything - WIRED PDFYan XiongОценок пока нет
- 2011-11-09 Diana and AtenaДокумент8 страниц2011-11-09 Diana and AtenareluОценок пока нет
- 2.1 DRH Literary Translation-An IntroductionДокумент21 страница2.1 DRH Literary Translation-An IntroductionHassane DarirОценок пока нет
- LSL Education Center Final Exam 30 Minutes Full Name - Phone NumberДокумент2 страницыLSL Education Center Final Exam 30 Minutes Full Name - Phone NumberDilzoda Boytumanova.Оценок пока нет
- 2 - Sample Kids Can Read and Write 2 and 3 Letter Words - Step 2 Final Downloadable Version For Website PDFДокумент18 страниц2 - Sample Kids Can Read and Write 2 and 3 Letter Words - Step 2 Final Downloadable Version For Website PDFsantoshiОценок пока нет
- Atom SDДокумент5 страницAtom SDatomsa shiferaОценок пока нет
- ProspДокумент146 страницProspRajdeep BharatiОценок пока нет
- Catalogue of Archaeological Finds FromДокумент67 страницCatalogue of Archaeological Finds FromAdrinaОценок пока нет
- Advantages Renewable Energy Resources Environmental Sciences EssayДокумент3 страницыAdvantages Renewable Energy Resources Environmental Sciences EssayCemerlang StudiОценок пока нет
- ISO-3046-4-2009 (Gobernador de Velocidad)Документ8 страницISO-3046-4-2009 (Gobernador de Velocidad)David GastelumОценок пока нет
- FHHR 013 Red Tag Procedure PDFДокумент5 страницFHHR 013 Red Tag Procedure PDFN3N5YОценок пока нет