Вам также может понравиться
- Race Condition Is An Undesirable Situation That Occurs When A Device or System Attempts ToДокумент15 страницRace Condition Is An Undesirable Situation That Occurs When A Device or System Attempts ToIsha ShahОценок пока нет
- Practical Numerical C Programming: Finance, Engineering, and Physics ApplicationsОт EverandPractical Numerical C Programming: Finance, Engineering, and Physics ApplicationsОценок пока нет
- Mining Weather Data Using RattleДокумент6 страницMining Weather Data Using RattleijcsnОценок пока нет
- 4 Implementing Application Specific Routines: App.c App.cДокумент5 страниц4 Implementing Application Specific Routines: App.c App.cKailash BhosaleОценок пока нет
- Plagiarism Detection SoftwareДокумент32 страницыPlagiarism Detection SoftwarekranthyОценок пока нет
- 1-CDAC Pattern and Sample PaperДокумент1 страница1-CDAC Pattern and Sample Paperamitupadhyay619Оценок пока нет
- C Language - Chapter 3Документ54 страницыC Language - Chapter 3dharmalemj6291Оценок пока нет
- L7 Functions s01Документ10 страницL7 Functions s01lonerstarОценок пока нет
- A Semiconductor Device Simulator Utilizing MATLAB: Fardi, Hamid Shawn PaceДокумент10 страницA Semiconductor Device Simulator Utilizing MATLAB: Fardi, Hamid Shawn PaceGurinder Pal SinghОценок пока нет
- Computer Lab MaintenanceДокумент44 страницыComputer Lab Maintenancey_69363495670% (10)
- Project Report COM6516Документ7 страницProject Report COM6516Shubham dashayaОценок пока нет
- A Factor Graph Model For Software Bug Finding: Ted Kremenek Andrew Y. NG Dawson EnglerДокумент7 страницA Factor Graph Model For Software Bug Finding: Ted Kremenek Andrew Y. NG Dawson EnglerPrabhdeep SinghОценок пока нет
- Constraint Based Analysis: SeminarДокумент21 страницаConstraint Based Analysis: SeminarTouristОценок пока нет
- Classes IntroДокумент25 страницClasses IntroCasey PerdidoОценок пока нет
- System Software 3Документ8 страницSystem Software 3Surendra Singh ChauhanОценок пока нет
- MLE in StataДокумент17 страницMLE in StatavivipaufОценок пока нет
- Project Report: Message Type Extraction From Log FilesДокумент70 страницProject Report: Message Type Extraction From Log FilesSridhar MocherlaОценок пока нет
- Programming Sucks But We Still Need To Score It For The Sake Not To See It AnymoreДокумент13 страницProgramming Sucks But We Still Need To Score It For The Sake Not To See It AnymoreTiang Yeu ShengОценок пока нет
- Chapter 5 - Abstraction - Encapsulation and Inheritance-EditedДокумент28 страницChapter 5 - Abstraction - Encapsulation and Inheritance-EditedMahedere TebebeОценок пока нет
- Project Report On Second Final Main Online Library Management System With 60 PagesДокумент59 страницProject Report On Second Final Main Online Library Management System With 60 PagesRajiv Kumar Garg0% (1)
- Compositional Pointer and Escape Analysis For Java ProgramsДокумент20 страницCompositional Pointer and Escape Analysis For Java ProgramspostscriptОценок пока нет
- Missing Link Prediction in Social NetworksДокумент9 страницMissing Link Prediction in Social NetworksJexiaОценок пока нет
- C Lang Viva QuestionsДокумент24 страницыC Lang Viva QuestionsSadaf Rasheed100% (1)
- Data Types and Input or Output OperatorsДокумент24 страницыData Types and Input or Output OperatorsRam NathОценок пока нет
- Subject - Computer ApplicationДокумент12 страницSubject - Computer ApplicationVishal Anant LadhaОценок пока нет
- Hospital ManagementДокумент13 страницHospital ManagementDeepak MehtaОценок пока нет
- Adaptive Online Program AnalysisДокумент10 страницAdaptive Online Program AnalysisPiya DeОценок пока нет
- Introduction To Flowcharting: Programming ProcessДокумент3 страницыIntroduction To Flowcharting: Programming ProcessporseenaОценок пока нет
- SEM - 2 - MC0066 - OOPS Using C++Документ18 страницSEM - 2 - MC0066 - OOPS Using C++Shibu GeorgeОценок пока нет
- Answers Odd Self 6th Edition C++Документ50 страницAnswers Odd Self 6th Edition C++ZhichaoWangОценок пока нет
- Basic C Interview QuestionsДокумент14 страницBasic C Interview Questionsgouri_shanker21Оценок пока нет
- DATA STRUCTURE NotesДокумент101 страницаDATA STRUCTURE Notesrockmeena127Оценок пока нет
- CS-602 - PPL - Unit-4Документ54 страницыCS-602 - PPL - Unit-4vekkОценок пока нет
- SDTL Lab ManualДокумент22 страницыSDTL Lab Manualsatish_munnaОценок пока нет
- Nonfictionsrivastav A 94 AtomДокумент10 страницNonfictionsrivastav A 94 AtomJoseph JohnОценок пока нет
- DSA Students Reference NotesДокумент96 страницDSA Students Reference NotesAbdul Azeez 312Оценок пока нет
- Data Structure 1Документ55 страницData Structure 1Subir MukherjeeОценок пока нет
- Chapter 1+DSTRUДокумент48 страницChapter 1+DSTRULeary John TambagahanОценок пока нет
- Program Slicing Techniques and Its ApplicationsДокумент15 страницProgram Slicing Techniques and Its ApplicationsijseaОценок пока нет
- F2DL ManualДокумент123 страницыF2DL ManualaugustainОценок пока нет
- C Interview Questions and Answers: What Is An Argument ? Differentiate Between Formal Arguments and Actual Arguments?Документ4 страницыC Interview Questions and Answers: What Is An Argument ? Differentiate Between Formal Arguments and Actual Arguments?Karthik KartzОценок пока нет
- DsatextДокумент69 страницDsatextAyush SharmaОценок пока нет
- AlgorithmДокумент91 страницаAlgorithmapi-3782519Оценок пока нет
- Bak A and Bartlomowicz T Conjoint Analysis Method and Its Implementation in Conjoint R PackageДокумент9 страницBak A and Bartlomowicz T Conjoint Analysis Method and Its Implementation in Conjoint R PackageBob FinlaysonОценок пока нет
- MATLAB Software For Recursive Identification and Scaling Using A Structured Nonlinear Black-Box ModelДокумент41 страницаMATLAB Software For Recursive Identification and Scaling Using A Structured Nonlinear Black-Box ModelJHelfОценок пока нет
- C Study GuideДокумент10 страницC Study Guidechandra.sroОценок пока нет
- ADSA Lab ManualДокумент225 страницADSA Lab ManualjyothibellaryvОценок пока нет
- Unit 1Документ17 страницUnit 1ArsalanОценок пока нет
- I T Skills RecordДокумент23 страницыI T Skills RecordB.S.Krishna ShettyОценок пока нет
- EMT Simulation Integrating With Other ToosДокумент5 страницEMT Simulation Integrating With Other ToosjdebnathОценок пока нет
- BSIT F21 DS & Algo Lecture 1Документ21 страницаBSIT F21 DS & Algo Lecture 1aine hОценок пока нет
- Summary of C++ Data Structures: Part 0: ReviewДокумент77 страницSummary of C++ Data Structures: Part 0: ReviewLakshya RajputОценок пока нет
- Context Likelihood of RelatednessДокумент10 страницContext Likelihood of Relatedness143davbecОценок пока нет
- Root A. Python For Data Analytics. A Beginners Guide For Learning 2019Документ167 страницRoot A. Python For Data Analytics. A Beginners Guide For Learning 2019Brume100% (1)
- Cacm 10575Документ8 страницCacm 10575jehaye7281Оценок пока нет
- Mathematics 08 01838Документ16 страницMathematics 08 01838RheaBautistaОценок пока нет
- New Microsoft Office Word DocumentДокумент35 страницNew Microsoft Office Word DocumentVinamra MittalОценок пока нет
- MATLABДокумент12 страницMATLABSiva SivaОценок пока нет
- Oakland 10Документ15 страницOakland 10metatron13Оценок пока нет
- Sr. No RAC Name Address State Phone NumberДокумент4 страницыSr. No RAC Name Address State Phone Numberabhay.joshiОценок пока нет
- Sr. No RAC Name Address State Phone NumberДокумент4 страницыSr. No RAC Name Address State Phone Numberabhay.joshiОценок пока нет
- ASCIIДокумент3 страницыASCIIabhay.joshiОценок пока нет
- ASCIIДокумент3 страницыASCIIabhay.joshiОценок пока нет
- Building A Custom Rifle StockДокумент38 страницBuilding A Custom Rifle Stock24HR Airgunner Channel100% (1)
- StarbucksДокумент19 страницStarbucksNimah SaeedОценок пока нет
- Kinematic Analysis of 5 Dof Lynx ArmДокумент6 страницKinematic Analysis of 5 Dof Lynx ArmsathyaОценок пока нет
- Muse Score 3Документ246 страницMuse Score 3lejuan0Оценок пока нет
- Water System Validation ExampleДокумент6 страницWater System Validation Exampledvdynamic1100% (2)
- 232-002101-00 Rev A SonicWALL WXA 5000 Getting Started GuideДокумент18 страниц232-002101-00 Rev A SonicWALL WXA 5000 Getting Started GuideFreddy Olivares CortesОценок пока нет
- Ad-All Ss Pressure GaugeДокумент5 страницAd-All Ss Pressure Gaugepankaj doshiОценок пока нет
- Commodity Market (A Project Report)Документ6 страницCommodity Market (A Project Report)Manish GargОценок пока нет
- Blogs To Submit Music ToДокумент6 страницBlogs To Submit Music Totheo theoОценок пока нет
- Truss Operating Manual: Version 7aДокумент28 страницTruss Operating Manual: Version 7adoyoudeОценок пока нет
- Dap 018 AДокумент28 страницDap 018 AajoaomvОценок пока нет
- Tyre RetradingДокумент4 страницыTyre RetradingdskjajkdsaОценок пока нет
- CFM56-5A-5B CO-063 Basic Engine Feb2014Документ27 страницCFM56-5A-5B CO-063 Basic Engine Feb2014Kelik Arif100% (1)
- Booz Allen - Strategy & BusinessДокумент18 страницBooz Allen - Strategy & BusinessPaul AllenОценок пока нет
- Power PhrasesДокумент23 страницыPower Phrasesname isОценок пока нет
- Sony CFD s100lДокумент11 страницSony CFD s100lGeremias KunohОценок пока нет
- Alternator LSA42.3j enДокумент12 страницAlternator LSA42.3j enArdi Wiranata PermadiОценок пока нет
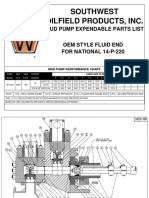
- Oem National 14-P-220 7500psiДокумент9 страницOem National 14-P-220 7500psiandrew0% (1)
- Medium Voltage Application Guide en IECДокумент224 страницыMedium Voltage Application Guide en IECJag Jagdish0% (1)
- Tubewell Energy Audit PDFДокумент172 страницыTubewell Energy Audit PDFshaheerdurrani100% (1)
- Substation Construction MethodologyДокумент23 страницыSubstation Construction Methodologyhusktech67% (15)
- MotRadar System PrinciplesДокумент26 страницMotRadar System PrinciplesReadmotОценок пока нет
- Installation, Operation, and Maintenance Manual: Ansi Process PumpДокумент56 страницInstallation, Operation, and Maintenance Manual: Ansi Process Pumpfaundes100% (1)
- Group B04 - MM2 - Pepper Spray Product LaunchДокумент34 страницыGroup B04 - MM2 - Pepper Spray Product LaunchBharatSubramonyОценок пока нет
- Appendix A.ivankova, Et Al.2006Документ34 страницыAppendix A.ivankova, Et Al.2006Ismet EliskalОценок пока нет
- 7810-8110-Ca-1540-651-001 - HP FG KodДокумент68 страниц7810-8110-Ca-1540-651-001 - HP FG Kodgopal krishnan0% (1)
- How To Export Resource Assignment Data To Excel From P6Документ9 страницHow To Export Resource Assignment Data To Excel From P6artletОценок пока нет
- DatasheetДокумент2 страницыDatasheetTesfay Zemuy GebrekidanОценок пока нет
- ProKlima Entfeuchter ManualДокумент336 страницProKlima Entfeuchter ManualJonОценок пока нет
- 9591-102-102-PVM-U-009-02A Nox CalculationsДокумент16 страниц9591-102-102-PVM-U-009-02A Nox CalculationsVijay PalОценок пока нет