Вам также может понравиться
- Engineering Electromagnetic Fields and Waves 2nd Edition PDFДокумент638 страницEngineering Electromagnetic Fields and Waves 2nd Edition PDFxieapi88% (42)
- Final Exam ReviewДокумент54 страницыFinal Exam ReviewThanh Nhàn50% (2)
- M.O.E.M.S Practice Packet 2016 Division E Contest 3 Problems With Solutions and AnswersДокумент3 страницыM.O.E.M.S Practice Packet 2016 Division E Contest 3 Problems With Solutions and AnswersRocket Fire83% (6)
- Oblique TrianglesДокумент18 страницOblique TrianglesGilbertОценок пока нет
- 3 D LectureДокумент36 страниц3 D LectureAisha AbuzgaiaОценок пока нет
- From Structural Analysis To Finite Element MethodДокумент25 страницFrom Structural Analysis To Finite Element MethodB S Praveen BspОценок пока нет
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsОт EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsОценок пока нет
- Raymond Keene - Flank Openings - BCMДокумент193 страницыRaymond Keene - Flank Openings - BCMduonza100% (2)
- Fea-Finite Element Analysis: Chapter-1 Stress TensorДокумент106 страницFea-Finite Element Analysis: Chapter-1 Stress Tensorkamsubh66Оценок пока нет
- SW ModelДокумент10 страницSW Modelcipcirip2010Оценок пока нет
- Park 1986Документ15 страницPark 1986arnold.r.mendoОценок пока нет
- ElastostaticДокумент39 страницElastostaticibrodel22Оценок пока нет
- Structural Dynamic Analysis of Cyclic Symmetric Structures: Senior Systems Engineer, SAIC, Huntsville, AL 35806Документ26 страницStructural Dynamic Analysis of Cyclic Symmetric Structures: Senior Systems Engineer, SAIC, Huntsville, AL 35806Silvia BertiОценок пока нет
- Modal Analysis For Random Vibration of Hysteretic FramesДокумент19 страницModal Analysis For Random Vibration of Hysteretic Framesutsav_koshtiОценок пока нет
- Dynamic Interaction of Surface Machine Foundations Under Vertical Harmonic ExcitationДокумент18 страницDynamic Interaction of Surface Machine Foundations Under Vertical Harmonic ExcitationSayed ElarabyОценок пока нет
- Structural Response Characteristics in Consideration of Directional Uncertainty of Earthquake Ground MotionДокумент10 страницStructural Response Characteristics in Consideration of Directional Uncertainty of Earthquake Ground MotionSakisОценок пока нет
- Effective Numerical Treatment of Boundary Integral Equations. J.C Lachat and WatsonДокумент15 страницEffective Numerical Treatment of Boundary Integral Equations. J.C Lachat and Watsonrahim.sihadjmohandОценок пока нет
- Dynamics-Assigment 2Документ16 страницDynamics-Assigment 2imran5705074Оценок пока нет
- in This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureДокумент35 страницin This Module Text in "Italic" Indicates Advanced Concepts. 2., Are Used For Shear' in Books and LiteratureKanti SolankiОценок пока нет
- 1998 JSV Pod FeenyДокумент10 страниц1998 JSV Pod FeenySamagassi SouleymaneОценок пока нет
- Chapter 1Документ21 страницаChapter 1Pranav DardaОценок пока нет
- The Equilibrium Equations of Membrane Shells Expressed in General Surface CoordinatesДокумент50 страницThe Equilibrium Equations of Membrane Shells Expressed in General Surface CoordinatesAbhishekОценок пока нет
- Elastic Buckling of Orthotropic Plates Under Varying Axial StressesДокумент8 страницElastic Buckling of Orthotropic Plates Under Varying Axial StressesManish ShashikantОценок пока нет
- Synthesis of A Spatial 3-RPS Parallel Manipulator Based On Physical ConstraintsДокумент8 страницSynthesis of A Spatial 3-RPS Parallel Manipulator Based On Physical ConstraintsdangvanluongОценок пока нет
- Rigid Body Motion 3Документ33 страницыRigid Body Motion 3RolandoОценок пока нет
- Wu&Smith 1995Документ17 страницWu&Smith 1995Luis Gustavo Lopes CostaОценок пока нет
- Chirikjian The Matrix Exponential in KinematicsДокумент12 страницChirikjian The Matrix Exponential in KinematicsIgnacioОценок пока нет
- Mansfield Linear Algebra Cuadraticas PDFДокумент19 страницMansfield Linear Algebra Cuadraticas PDFAkasha GodoyОценок пока нет
- Vlasov Computation of Prismatic SHellsДокумент53 страницыVlasov Computation of Prismatic SHellsMaliOdKužineОценок пока нет
- 1 Direct Dynamics Newton Euler Equations of MotionДокумент33 страницы1 Direct Dynamics Newton Euler Equations of MotionAbhishek KumarОценок пока нет
- Tippe TopДокумент8 страницTippe TopAgustinaGonzálezОценок пока нет
- StressДокумент3 страницыStressdamastergen326Оценок пока нет
- ME2000 Project - Projectile Motion: November 18, 2004Документ3 страницыME2000 Project - Projectile Motion: November 18, 2004girithik14Оценок пока нет
- Effect of The Boundary Conditions On In-Plane Dynamic Behavior of A Rectangular PlateДокумент9 страницEffect of The Boundary Conditions On In-Plane Dynamic Behavior of A Rectangular PlatebashmalОценок пока нет
- Engineering Mechanics I Meg205-2Документ15 страницEngineering Mechanics I Meg205-2Oyekale IniОценок пока нет
- PDF Dynamic Analysis of StructuresДокумент43 страницыPDF Dynamic Analysis of StructuresChegue BureОценок пока нет
- Engineering Mechanics PDFДокумент10 страницEngineering Mechanics PDFAli makkiОценок пока нет
- Unitary Groups and SU (N)Документ13 страницUnitary Groups and SU (N)acomillaОценок пока нет
- Dynamic Analysis of StructuresДокумент57 страницDynamic Analysis of StructuresYollanda LorenzaОценок пока нет
- Stress TensorДокумент25 страницStress TensorJsvijay KumarОценок пока нет
- CM LC1Документ28 страницCM LC1Eng W EaОценок пока нет
- Iu (TT) L LW (TJ) L (W (TJ)Документ17 страницIu (TT) L LW (TJ) L (W (TJ)EliotPezoZegarraОценок пока нет
- Kausel - Stiffness MatrixДокумент19 страницKausel - Stiffness MatrixkozloОценок пока нет
- Response of Sliding Structures To Harmonic Support MotionДокумент12 страницResponse of Sliding Structures To Harmonic Support MotionAbdul Monish SheikhОценок пока нет
- Vectorial Representation of Harmonic MotionsДокумент10 страницVectorial Representation of Harmonic MotionsI Nyoman BudirtaОценок пока нет
- Asymmetric Mathieu EquationsДокумент18 страницAsymmetric Mathieu Equationsamol maratheОценок пока нет
- Probabilistic Seismic Hazard Model of Inelastic Oscillator Based On Equivalent Linearization TechniqueДокумент10 страницProbabilistic Seismic Hazard Model of Inelastic Oscillator Based On Equivalent Linearization Techniquegorgika papandОценок пока нет
- 1979 Hundal - Response of A Base Excited System With Coulomb and Viscous FrictionДокумент8 страниц1979 Hundal - Response of A Base Excited System With Coulomb and Viscous FrictionAlexander Alvarez SanchezОценок пока нет
- A Consistent Theory of Finite Stretches and Finite Rotations, in Space-Curved Beams of Arbitrary Cross-SectionДокумент11 страницA Consistent Theory of Finite Stretches and Finite Rotations, in Space-Curved Beams of Arbitrary Cross-SectionBeny AbdouОценок пока нет
- W. F. Chen, Plasticity For Structural Engineers, 1988-179Документ1 страницаW. F. Chen, Plasticity For Structural Engineers, 1988-179ahmedОценок пока нет
- Description of Quantum Dynamics of Open Systems Based On Collision-Like ModelsДокумент11 страницDescription of Quantum Dynamics of Open Systems Based On Collision-Like ModelsMehdi RezaieОценок пока нет
- Energetics of PassivityДокумент8 страницEnergetics of Passivitynarumugai29Оценок пока нет
- Classical 093Документ33 страницыClassical 093Julian David Henao EscobarОценок пока нет
- Torsional Response in Buildings Exposed To Ground Motions Induced by Vrancea EarthquakesДокумент8 страницTorsional Response in Buildings Exposed To Ground Motions Induced by Vrancea EarthquakesIsmail DerbalОценок пока нет
- Properties of A Semi-Discrete Approximation To The Beam EquationДокумент11 страницProperties of A Semi-Discrete Approximation To The Beam EquationjtorerocОценок пока нет
- Lin Stab AnalysisДокумент7 страницLin Stab AnalysisMohammad RameezОценок пока нет
- Nemat Nasser Periodic Homogénisation 1981Документ17 страницNemat Nasser Periodic Homogénisation 1981auslenderОценок пока нет
- ViBrasi InmanДокумент67 страницViBrasi InmanAnonymous RJtBkn100% (1)
- HW 2Документ3 страницыHW 2Prajita RoyОценок пока нет
- Vehicle Dynamics CH 2 & 3Документ96 страницVehicle Dynamics CH 2 & 3Ashley MoreiraОценок пока нет
- APhO2001 Theory Prob 2Документ2 страницыAPhO2001 Theory Prob 2Popovici DraganОценок пока нет
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?От EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Оценок пока нет
- Ground Motion Sample Size Vs Estimation Uncertainty in Seismic RiskДокумент8 страницGround Motion Sample Size Vs Estimation Uncertainty in Seismic RiskYorgos BaltzopoulosОценок пока нет
- Constant-Ductility Residual Displacement RatiosДокумент15 страницConstant-Ductility Residual Displacement RatiosYorgos BaltzopoulosОценок пока нет
- State-Dependent Seismic Fragility Via Pushover AnalysisДокумент12 страницState-Dependent Seismic Fragility Via Pushover AnalysisYorgos BaltzopoulosОценок пока нет
- Spo2Frag V1.0: Software For Pushover-Based Derivation of Seismic Fragility CurvesДокумент15 страницSpo2Frag V1.0: Software For Pushover-Based Derivation of Seismic Fragility CurvesYorgos BaltzopoulosОценок пока нет
- A Look at The Seismic Risk of Italian Code-Conforming RC BuildingsДокумент12 страницA Look at The Seismic Risk of Italian Code-Conforming RC BuildingsYorgos BaltzopoulosОценок пока нет
- Newmark Hall Tripartite SpectrumДокумент3 страницыNewmark Hall Tripartite SpectrumYorgos Baltzopoulos100% (1)
- Lev Psakhis-The Complete FrenchДокумент274 страницыLev Psakhis-The Complete FrenchYorgos Baltzopoulos100% (6)
- Aqa 83002H QP Nov17 PDFДокумент32 страницыAqa 83002H QP Nov17 PDFpriyadarashani muthumalaОценок пока нет
- The Art of VA Filter Design - Vadim ZavalishinДокумент100 страницThe Art of VA Filter Design - Vadim ZavalishinthespОценок пока нет
- Ncert Solutions Class 8 Math Chapter 2 Ex 2 4Документ11 страницNcert Solutions Class 8 Math Chapter 2 Ex 2 4Vinayak MauryaОценок пока нет
- ADVANCED MATHEM WPS OfficeДокумент24 страницыADVANCED MATHEM WPS OfficeBryan NazarroОценок пока нет
- 1.105 Solid Mechanics Laboratory: Least Squares Fit of Straight Line To DataДокумент3 страницы1.105 Solid Mechanics Laboratory: Least Squares Fit of Straight Line To Dataprieten20006936Оценок пока нет
- Minor New CurrДокумент20 страницMinor New CurrAnanyaОценок пока нет
- MathsДокумент338 страницMathsSudarshan RajputОценок пока нет
- Lecture 25Документ20 страницLecture 25Kapil Dev SainiОценок пока нет
- Quadcopter Math Model (Amazing)Документ26 страницQuadcopter Math Model (Amazing)Joseph Oberholtzer83% (6)
- Pre-Calculus ToДокумент1 страницаPre-Calculus ToAlvin PaboresОценок пока нет
- Review of Related LiteratureДокумент4 страницыReview of Related LiteratureJennelManaloОценок пока нет
- Final End of Year Grade 4.mathematics.Документ5 страницFinal End of Year Grade 4.mathematics.nkosi.mkwaОценок пока нет
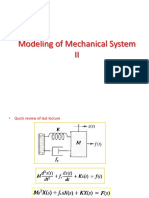
- Modeling of Mechanical System IIДокумент11 страницModeling of Mechanical System IIshrey saxenaОценок пока нет
- 2020 J2 Synoptic Assessment Revision Paper 3 - QNДокумент5 страниц2020 J2 Synoptic Assessment Revision Paper 3 - QNLee98Оценок пока нет
- Chapter 1. Solutions To ProblemsДокумент26 страницChapter 1. Solutions To ProblemsTrungkeeperОценок пока нет
- Homework Set 1: Due August 14Документ3 страницыHomework Set 1: Due August 14jog10Оценок пока нет
- 013 DSETarget2Документ48 страниц013 DSETarget2918goodyОценок пока нет
- The First Prize Is The Fields MedalsДокумент2 страницыThe First Prize Is The Fields MedalsTHINK ABOUT ITОценок пока нет
- A Generalized Normal DistributionДокумент11 страницA Generalized Normal Distributionchang lichangОценок пока нет
- Adjacent Angles in GeometryДокумент3 страницыAdjacent Angles in Geometryapi-174391216Оценок пока нет
- KMNS - 2223 - Pre PSPM SM015 - Set 3Документ4 страницыKMNS - 2223 - Pre PSPM SM015 - Set 3Nur ZuhayraОценок пока нет
- Robust Covariance Matrix Estimation and Portfolio Allocation: The Case of Non-Homogeneous AssetsДокумент6 страницRobust Covariance Matrix Estimation and Portfolio Allocation: The Case of Non-Homogeneous AssetsererreОценок пока нет
- Objective3Документ10 страницObjective3sanjay0% (1)
- 4MB0 01 Que 20190110Документ20 страниц4MB0 01 Que 20190110Farbeen MirzaОценок пока нет
- Chapter 8Документ50 страницChapter 8John AshrafОценок пока нет
- Introduction To Quadratic EquationsДокумент32 страницыIntroduction To Quadratic EquationsChrisnaliam FelisildaОценок пока нет
- Nonuniform Negative Sampling and Log Odds Correction With Rare Events DataДокумент32 страницыNonuniform Negative Sampling and Log Odds Correction With Rare Events DataConfused SoulОценок пока нет