Вам также может понравиться
- Sesión 2 - Compuertas Lógicas y Álgebra BooleanaДокумент39 страницSesión 2 - Compuertas Lógicas y Álgebra BooleanaSyd Barrett100% (1)
- GalДокумент17 страницGalMox HernandezОценок пока нет
- Práctica 6: Patrón de Radiación de Una Antena Parabólica, Alimentada Con Un Dipolo de Media Longitud de OndaДокумент11 страницPráctica 6: Patrón de Radiación de Una Antena Parabólica, Alimentada Con Un Dipolo de Media Longitud de OndaBrayan Vidal MoralesОценок пока нет
- Informe Puente HДокумент4 страницыInforme Puente HDayner AlvaradoОценок пока нет
- Comparadores de MagnitudДокумент2 страницыComparadores de MagnitudAndres SasintuñaОценок пока нет
- MICROCINTAДокумент23 страницыMICROCINTAEve San0% (1)
- Problemas PCM TDM CumbalДокумент13 страницProblemas PCM TDM CumbalEve AndyОценок пока нет
- Convertidor DC DC Tipo ZetaДокумент20 страницConvertidor DC DC Tipo ZetaNicolás Santamaría HenaoОценок пока нет
- Generic Array Logic: Funcionamiento Del GALДокумент7 страницGeneric Array Logic: Funcionamiento Del GALMario Galdos PolancoОценок пока нет
- Antenas Lineales OPДокумент13 страницAntenas Lineales OPMaura Benítez AlmirónОценок пока нет
- Control PID de Velocidad Del Motor DCДокумент4 страницыControl PID de Velocidad Del Motor DCJherson Andrade Tenorio100% (1)
- PLC Introducción de RedesДокумент5 страницPLC Introducción de RedesAdrian100% (1)
- Introduccion A Los PLLДокумент13 страницIntroduccion A Los PLLpablo9vОценок пока нет
- Reporte Regulador de VoltajeДокумент5 страницReporte Regulador de VoltajeJose Pablo Morales ResendizОценок пока нет
- Circuitos Secuenciales SincronosДокумент5 страницCircuitos Secuenciales SincronosDaniela SevillaОценок пока нет
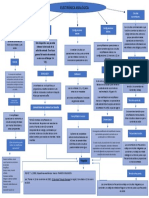
- Mapa Conceptual de Elecronica ReanalogicaДокумент1 страницаMapa Conceptual de Elecronica ReanalogicaAlfredo DavilaОценок пока нет
- Práctica 4 - Circuitos Detectores de Cruce Por CeroДокумент4 страницыPráctica 4 - Circuitos Detectores de Cruce Por CeroYilmarОценок пока нет
- Programacion VHDL Con PLD PDFДокумент61 страницаProgramacion VHDL Con PLD PDFMtzОценок пока нет
- Proyecto FinalДокумент21 страницаProyecto FinalFerОценок пока нет
- Puente de ImpedanciasДокумент7 страницPuente de ImpedanciasÁngel Y. Quintero100% (2)
- Disparo Del SCR Mediante Osciladores de Relajación Con UjtДокумент7 страницDisparo Del SCR Mediante Osciladores de Relajación Con UjtCriztian HuayllaniОценок пока нет
- Sistemas Tipo 0, Tipo 1, TipoДокумент19 страницSistemas Tipo 0, Tipo 1, TipoPaola Sanchez CifuentesОценок пока нет
- Teoria de Controles Atoma7-13 PDFДокумент46 страницTeoria de Controles Atoma7-13 PDFGuillermo CondoriОценок пока нет
- Convertidores de CD y CAДокумент19 страницConvertidores de CD y CAtsuoscaradrianОценок пока нет
- Acopladores ÓpticosДокумент24 страницыAcopladores ÓpticosJesus Custodio PisfilОценок пока нет
- Lineas de TransmisionДокумент3 страницыLineas de TransmisionSamuelОценок пока нет
- Repaso Grafico LGR y Sistemas de Fase No MinimaДокумент35 страницRepaso Grafico LGR y Sistemas de Fase No MinimaJUAN REYES TRONCOSOОценок пока нет
- Guia 2.Документ3 страницыGuia 2.Abel Ismael De Jesus Rodriguez100% (1)
- Identificación Paramétrica de Una Planta de Primer Orden Por Mínimos CuadradosДокумент12 страницIdentificación Paramétrica de Una Planta de Primer Orden Por Mínimos CuadradosArmando Vázquez RamírezОценок пока нет
- Análisis de La Respuesta TransitoriaДокумент21 страницаAnálisis de La Respuesta TransitoriaIrving Noel Basto CruzОценок пока нет
- Primera Práctica de Ingeniería de Control Automático Ii: Duración: 110 Minutos FECHA 5-12-2021 Con Elementos de ConsultaДокумент1 страницаPrimera Práctica de Ingeniería de Control Automático Ii: Duración: 110 Minutos FECHA 5-12-2021 Con Elementos de ConsultaGustavo Dioses SiguasОценок пока нет
- Mux y DemuxДокумент13 страницMux y DemuxfrandyОценок пока нет
- Ensayo FPGAДокумент20 страницEnsayo FPGAthorset0% (1)
- Laboratorio # 8 - Características Reales de Los Amplificadores OperacionalesДокумент8 страницLaboratorio # 8 - Características Reales de Los Amplificadores OperacionalesGEAN CARLO RODRIGUEZ ROAОценок пока нет
- SISTEMA #3. - PÉNDULO DE FURUTA CorregidoДокумент26 страницSISTEMA #3. - PÉNDULO DE FURUTA CorregidoSergioAugustoBaldeonОценок пока нет
- Variable de Estado Por RealimentaciónДокумент7 страницVariable de Estado Por Realimentaciónalenno1Оценок пока нет
- Transmision y Recepcion (Am y FM)Документ46 страницTransmision y Recepcion (Am y FM)Wilder EscuderoОценок пока нет
- Formato Articulos IEEE ConferenciaДокумент8 страницFormato Articulos IEEE ConferenciaJuan Esteban Agudelo AgudeloОценок пока нет
- Ventajas y Desventajas de Am y FMДокумент5 страницVentajas y Desventajas de Am y FMYhan ManduraОценок пока нет
- Filtros Pasa-Altas 1er-3er Orden Butterworth PDFДокумент18 страницFiltros Pasa-Altas 1er-3er Orden Butterworth PDFJP PastasОценок пока нет
- B-V P Clasificación de RelésДокумент24 страницыB-V P Clasificación de RelésJoseFreites100% (1)
- Controladores de Voltaje CaДокумент18 страницControladores de Voltaje CaThalia MorelОценок пока нет
- Una Línea de Transmisión Trifásica de Un Solo Circuito Está Conformada Por Conductores Parakeet Con Espaciamiento Horizontal Plano de 19Документ1 страницаUna Línea de Transmisión Trifásica de Un Solo Circuito Está Conformada Por Conductores Parakeet Con Espaciamiento Horizontal Plano de 19LUISA FERNANDA ARROYAVE MADRIGALОценок пока нет
- 04 Comparadores BásicosДокумент15 страниц04 Comparadores BásicosConcepcion Mota MОценок пока нет
- Relevadores HistoriaДокумент4 страницыRelevadores Historiarafael salas munosОценок пока нет
- PREGUNTAS DevicenetДокумент1 страницаPREGUNTAS DevicenetMateo IbarraОценок пока нет
- Ejercicios de Impulsos, Rampas y Escalares de SeñalesДокумент4 страницыEjercicios de Impulsos, Rampas y Escalares de SeñalesAntonioОценок пока нет
- 2do Corte Tarea 2 Cuestionario-AlnardoДокумент5 страниц2do Corte Tarea 2 Cuestionario-AlnardoWilmer SuarezОценок пока нет
- Modelado en El Dominio de La FrecuenciaДокумент10 страницModelado en El Dominio de La FrecuenciaOscar ZambranoОценок пока нет
- Exposicion TriacДокумент12 страницExposicion TriacGael Pelagio RamirezОценок пока нет
- SNubberДокумент7 страницSNubberCarlos Eduardo SalazarОценок пока нет
- 1 Laboratorio de Control FINAL PDFДокумент6 страниц1 Laboratorio de Control FINAL PDFIVAN ALONSO CCAHUACHIA LETONAОценок пока нет
- Teoria Electromagnética Unidad 3Документ26 страницTeoria Electromagnética Unidad 3Alejandro GarciaОценок пока нет
- Retenedor de Orden 0Документ12 страницRetenedor de Orden 0Rodolfo Fernández GallardoОценок пока нет
- p7 - Multiplexores y DemultiplexoresДокумент7 страницp7 - Multiplexores y DemultiplexoresalexОценок пока нет
- Respuesta A La Función Escalón en Un Circuito R-L-C ParaleloДокумент8 страницRespuesta A La Función Escalón en Un Circuito R-L-C ParaleloAbel Menendez RamosОценок пока нет
- Tipos de SaltosДокумент3 страницыTipos de SaltosReynel ChaparroОценок пока нет
- Cap 7norman Nise.Документ13 страницCap 7norman Nise.Alex TipantuñaОценок пока нет
- Deber 3Документ4 страницыDeber 3Diego ValdiviezoОценок пока нет
- Enfoque práctico de control moderno: Con aplicaciones en MatlabОт EverandEnfoque práctico de control moderno: Con aplicaciones en MatlabРейтинг: 5 из 5 звезд5/5 (1)
- Mecanismos de Solución de ControversiasДокумент11 страницMecanismos de Solución de ControversiasRuben RomeroОценок пока нет
- Foda UpvmДокумент2 страницыFoda UpvmRuben RomeroОценок пока нет
- Comentario de Diapositivas y GuiaДокумент13 страницComentario de Diapositivas y GuiaRuben RomeroОценок пока нет
- Lid EresДокумент2 страницыLid EresRuben RomeroОценок пока нет
- CuestionarioДокумент5 страницCuestionarioRuben RomeroОценок пока нет
- La CorporaciónДокумент2 страницыLa CorporaciónRuben Romero0% (1)
- Tarea 1-Ensayo de Cultura FinancieraДокумент2 страницыTarea 1-Ensayo de Cultura FinancieraRuben RomeroОценок пока нет
- La CorporaciónДокумент2 страницыLa CorporaciónRuben Romero0% (1)
- Riego SubДокумент2 страницыRiego SubRuben RomeroОценок пока нет
- Tutorial PicsДокумент65 страницTutorial PicsRuben RomeroОценок пока нет
- Sistema de Información de Recursos Humanos DefiniciónДокумент4 страницыSistema de Información de Recursos Humanos DefiniciónRoberto Carlos Rengifo FigueroaОценок пока нет
- Ga2 220501094 Aa1 Ev03 Especificacion de Los Referentes Tecnicos Del Hardware SoftwareДокумент8 страницGa2 220501094 Aa1 Ev03 Especificacion de Los Referentes Tecnicos Del Hardware SoftwareSamuel75% (4)
- Caso Practicos MF1442 - 3Документ5 страницCaso Practicos MF1442 - 3Vanessa Villaran0% (1)
- Aaa3 Ev1 Informe Organización y Definicion de Inventario de Una OficinaДокумент5 страницAaa3 Ev1 Informe Organización y Definicion de Inventario de Una OficinajorgeОценок пока нет
- Evidencia Cuadro Comparativo Reconocer Diferentes Topologias Redes y CaracteristicasДокумент2 страницыEvidencia Cuadro Comparativo Reconocer Diferentes Topologias Redes y CaracteristicasDiego Jimenez IbañezОценок пока нет
- CALCULO 1 Ing. BazanДокумент256 страницCALCULO 1 Ing. BazanFRANKLIN QUELCAОценок пока нет
- Hydrotrainer 200Документ24 страницыHydrotrainer 200elmfp7774676Оценок пока нет
- Exámenes Eugenio Espejo PCIДокумент9 страницExámenes Eugenio Espejo PCIDMishelОценок пока нет
- Manual CronoДокумент80 страницManual CronorocondealОценок пока нет
- Convertidor Analógico A Digital Por Aproximaciones SucesivasДокумент2 страницыConvertidor Analógico A Digital Por Aproximaciones SucesivasFreddy Jesus Ingaruca OrihuelaОценок пока нет
- M2 RetoN1 AvionДокумент3 страницыM2 RetoN1 AvionLaura CamilaОценок пока нет
- Qué Es Un Modelo DimensionalДокумент6 страницQué Es Un Modelo DimensionalRubi MedelОценок пока нет
- Método de Trabajo VirtualДокумент4 страницыMétodo de Trabajo VirtualNolberto H ReyesОценок пока нет
- Actividad 5Документ9 страницActividad 5Elizabeth SolisОценок пока нет
- Para Este Ejercicio Usaremos 2 Routers en Nuestro Caso Usaremos El c2691 Tambien Usaremos Un Frilay y 2 OrdenadoresДокумент3 страницыPara Este Ejercicio Usaremos 2 Routers en Nuestro Caso Usaremos El c2691 Tambien Usaremos Un Frilay y 2 OrdenadoresDaniel Espiritu CabelОценок пока нет
- UNIDAD 1 Ergonomía.Документ42 страницыUNIDAD 1 Ergonomía.ALDHAIR LANDEROS ESCALANTEОценок пока нет
- Lab6 - Pruebas de Aislamiento1Документ7 страницLab6 - Pruebas de Aislamiento1brevis ruben ticona apazaОценок пока нет
- Grupo 6 Apple T.P. Estructura, Toma de Decisiones y Administración Del Cambio (Daniela Alejandra Giordano)Документ10 страницGrupo 6 Apple T.P. Estructura, Toma de Decisiones y Administración Del Cambio (Daniela Alejandra Giordano)Maxi LanattaОценок пока нет
- SCR Malla de DisparoДокумент2 страницыSCR Malla de DisparoANDY MIGUEL PANTOJA ATENCIOОценок пока нет
- Problemas Empresa Caso de EstudioДокумент2 страницыProblemas Empresa Caso de EstudiogermanОценок пока нет
- Ortiz Perez - Sara Elena - M01S2Al3Документ9 страницOrtiz Perez - Sara Elena - M01S2Al3Sara Elena OrtizОценок пока нет
- TESINAДокумент64 страницыTESINACruz DiazОценок пока нет
- 1.3 Parametros MecanicosДокумент3 страницы1.3 Parametros MecanicosCruzy BedollaОценок пока нет
- Proyecto Final Base Datos 1Документ32 страницыProyecto Final Base Datos 1Oscar100% (5)
- MAXQDAДокумент10 страницMAXQDAJeff RoblesОценок пока нет
- Gestión de La Seguridad de La InformaciónДокумент145 страницGestión de La Seguridad de La InformaciónFlyingRanch100% (1)
- Lineamientos Qlik Sense v1.0 PDFДокумент10 страницLineamientos Qlik Sense v1.0 PDFMilton Bryan A AОценок пока нет
- Produccion ProductividadДокумент65 страницProduccion ProductividadAbraham BedranОценок пока нет
- Bullying y CyberBullying - Tipos, Participantes y CaracteristicasДокумент3 страницыBullying y CyberBullying - Tipos, Participantes y CaracteristicasOmar Alejandro SuarezОценок пока нет
- SRI02. - Servicios de Nombres de DominioДокумент52 страницыSRI02. - Servicios de Nombres de DominioNacho VRОценок пока нет