Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Recipes From The Perfect Scoop by David LebovitzДокумент10 страницRecipes From The Perfect Scoop by David LebovitzThe Recipe Club100% (7)
- Catalogo Aesculap PDFДокумент16 страницCatalogo Aesculap PDFHansОценок пока нет
- Immigrant Italian Stone CarversДокумент56 страницImmigrant Italian Stone Carversglis7100% (2)
- Biophoton RevolutionДокумент3 страницыBiophoton RevolutionVyavasayaha Anita BusicОценок пока нет
- Naming Hydrocarbons Worksheet1 Key 12 26 08 PDFДокумент2 страницыNaming Hydrocarbons Worksheet1 Key 12 26 08 PDFMarilyn Castro Laquindanum100% (1)
- JC Series Jaw Crusher PDFДокумент8 страницJC Series Jaw Crusher PDFgarrybieber100% (1)
- CBSE DetailsДокумент6 страницCBSE DetailsNARESH KUMARОценок пока нет
- Biology Accel Syllabus 2011-2012Документ3 страницыBiology Accel Syllabus 2011-2012Mike DeleonОценок пока нет
- Guia de CondensadoresДокумент193 страницыGuia de CondensadoresPaola Segura CorreaОценок пока нет
- A Year On A FarmДокумент368 страницA Year On A FarmvehapkolaОценок пока нет
- Shawal 1431 AH Prayer ScheduleДокумент2 страницыShawal 1431 AH Prayer SchedulemasjidibrahimОценок пока нет
- Mahindra & MahindraДокумент13 страницMahindra & MahindraAbhishek DharmadhikariОценок пока нет
- Shandong Baoshida Cable Co, LTD.: Technical ParameterДокумент3 страницыShandong Baoshida Cable Co, LTD.: Technical ParameterkmiqdОценок пока нет
- Dual Shield 7100 Ultra: Typical Tensile PropertiesДокумент3 страницыDual Shield 7100 Ultra: Typical Tensile PropertiesDino Paul Castro HidalgoОценок пока нет
- Socialized HousingДокумент48 страницSocialized HousingJessieReiVicedoОценок пока нет
- Electric ScootorДокумент40 страницElectric Scootor01fe19bme079Оценок пока нет
- World's Standard Model G6A!: Low Signal RelayДокумент9 страницWorld's Standard Model G6A!: Low Signal RelayEgiОценок пока нет
- Updated Factory Profile of Aleya Apparels LTDДокумент25 страницUpdated Factory Profile of Aleya Apparels LTDJahangir Hosen0% (1)
- Gemh 108Документ20 страницGemh 108YuvrajОценок пока нет
- DR PDFДокумент252 страницыDR PDFa_ouchar0% (1)
- Elements of Romanticism in The Poetry of W. B. Yeats: Romantic InfluencesДокумент8 страницElements of Romanticism in The Poetry of W. B. Yeats: Romantic InfluencesSadman Shaid SaadОценок пока нет
- Sat Vocabulary Lesson and Practice Lesson 5Документ3 страницыSat Vocabulary Lesson and Practice Lesson 5api-430952728Оценок пока нет
- Potassium Fixation As Affected by Alternate Wetting and Drying in Some Soil Series of JharkhandДокумент4 страницыPotassium Fixation As Affected by Alternate Wetting and Drying in Some Soil Series of JharkhandDr Amrit Kumar JhaОценок пока нет
- Module 1 Notes The White Bird Reading The Image Painting Analysis PDFДокумент4 страницыModule 1 Notes The White Bird Reading The Image Painting Analysis PDFMelbely Rose Apigo BaduaОценок пока нет
- Updated G10 Class Routine Effective From 12 January 2023Документ1 страницаUpdated G10 Class Routine Effective From 12 January 2023NiloyОценок пока нет
- Niir Integrated Organic Farming Handbook PDFДокумент13 страницNiir Integrated Organic Farming Handbook PDFNatalieОценок пока нет
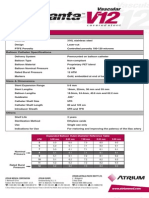
- Advanta V12 Data SheetДокумент2 страницыAdvanta V12 Data SheetJuliana MiyagiОценок пока нет
- Logic NotesДокумент19 страницLogic NotesCielo PulmaОценок пока нет
- Math AA SL P 1 Marks SchemeДокумент6 страницMath AA SL P 1 Marks SchemeMrin GhoshОценок пока нет
- Introduction To LCCДокумент32 страницыIntroduction To LCCGonzalo LopezОценок пока нет