Вам также может понравиться
- Televisión digital y telecomunicaciones en comunidades de propietariosОт EverandTelevisión digital y telecomunicaciones en comunidades de propietariosОценок пока нет
- Estabilidad Transitoria-Areas Iguales PDFДокумент7 страницEstabilidad Transitoria-Areas Iguales PDFHUGASO1Оценок пока нет
- Automatización de Un Sistema de Suministro de CombustibleДокумент6 страницAutomatización de Un Sistema de Suministro de Combustiblealejo18871Оценок пока нет
- Tarea Sesión 7Документ8 страницTarea Sesión 7Rody Montoya VillanuevaОценок пока нет
- Implementación y control de un péndulo invertido de dos grados de libertadДокумент6 страницImplementación y control de un péndulo invertido de dos grados de libertadISmael MEdina LOpezОценок пока нет
- ELECTRICASДокумент49 страницELECTRICASTony VenturaОценок пока нет
- Preguntas Examen Practico PDFДокумент7 страницPreguntas Examen Practico PDFGoyo ManceraОценок пока нет
- Informe Arduino Salinas JoaquinДокумент10 страницInforme Arduino Salinas JoaquinJoaquin SalinasОценок пока нет
- Control AdaptativoДокумент14 страницControl AdaptativoRenzo Zuñiga Castillo100% (1)
- Semaforo Peanotal y VehicularДокумент9 страницSemaforo Peanotal y VehicularAlex AndradeОценок пока нет
- 2 TransformacionesLABДокумент4 страницы2 TransformacionesLABjean bobadillaОценок пока нет
- Configuraciones QuímicasДокумент10 страницConfiguraciones Químicasdéborah_rosalesОценок пока нет
- Inconvenientes y estructura básica de la electrónica de potenciaДокумент5 страницInconvenientes y estructura básica de la electrónica de potenciajaimeОценок пока нет
- Sistemas ScadaДокумент10 страницSistemas ScadaBryan CarballoОценок пока нет
- Act. Sem2Документ3 страницыAct. Sem2Leimer Martinez Pinto100% (1)
- Diseño de máquina selectora de frutas con sistema PLCДокумент7 страницDiseño de máquina selectora de frutas con sistema PLCLaura Valentina LazoОценок пока нет
- 900 TC16Документ1 страница900 TC16dibu_boОценок пока нет
- Seleccion de Un PLC PDFДокумент20 страницSeleccion de Un PLC PDFCarlos JaramilloОценок пока нет
- Resoluciones Del SensorДокумент20 страницResoluciones Del SensorGabriel AparicioОценок пока нет
- Control AdaptativoДокумент50 страницControl AdaptativoBRYAN VLADIMIR BATIOJA CARVACHEОценок пока нет
- Caluculo de Fusibles y ProteccionesДокумент3 страницыCaluculo de Fusibles y ProteccionesRandy VanegasОценок пока нет
- 1 RespuestaTiempoДокумент5 страниц1 RespuestaTiempojean bobadillaОценок пока нет
- Nom-001-Sede-2012 Instalaciones EléctricasДокумент16 страницNom-001-Sede-2012 Instalaciones EléctricaskillerdecorazonОценок пока нет
- Esclusa Desechable Hospitales Plano V2Документ2 страницыEsclusa Desechable Hospitales Plano V2Dorian ArriagaОценок пока нет
- Pirometro AutonicДокумент3 страницыPirometro AutonicShalo ChtОценок пока нет
- Central Eléctrica EólicaДокумент20 страницCentral Eléctrica EólicaPerla de Maria Santa Sanchez MestanzaОценок пока нет
- Automatismos ElectricosДокумент34 страницыAutomatismos ElectricosDiego AVОценок пока нет
- Sist - Control 01T ProyectoFinalДокумент15 страницSist - Control 01T ProyectoFinalMarcelo Saldarriaga Rivera100% (1)
- Modelo de La Maquina Sincronica Controlda Mediante DTCДокумент17 страницModelo de La Maquina Sincronica Controlda Mediante DTCMiguel Gualan AndradeОценок пока нет
- Texto NeumáticaДокумент37 страницTexto NeumáticaFelipe Angel Ramirez AparicioОценок пока нет
- Gis SUBESTACIONДокумент20 страницGis SUBESTACIONrosi100% (1)
- Principales Fallas en Líneas de Transmisión y SubestacionesДокумент12 страницPrincipales Fallas en Líneas de Transmisión y SubestacionesJulio Fabricio Pino BustamanteОценок пока нет
- Diapositivas Clase 6Документ22 страницыDiapositivas Clase 6Daniel España Losada100% (1)
- Formato Censo 2021 - Optimus ApartmentsДокумент1 страницаFormato Censo 2021 - Optimus ApartmentsLady Johanna Uribe BeltranОценок пока нет
- Sistemas Trifásicos DesbalanceadosДокумент17 страницSistemas Trifásicos Desbalanceadosmane777Оценок пока нет
- Grupo 4 Maquinas Sincronas de Polos SalientesДокумент8 страницGrupo 4 Maquinas Sincronas de Polos Salientesluis ordoñezОценок пока нет
- Bomba de Agua No PotableДокумент4 страницыBomba de Agua No PotableJuan Carlos Intriago DelgadoОценок пока нет
- 6TIoQk8TS4uIZNI0mkzf Dia 2 Metodo 3x1 - 1 M TodoДокумент1 страница6TIoQk8TS4uIZNI0mkzf Dia 2 Metodo 3x1 - 1 M TodoCristian Ariel FrancoОценок пока нет
- Control de suspensión magnética de bola mediante ubicación de polosДокумент15 страницControl de suspensión magnética de bola mediante ubicación de polosmyoshkeuОценок пока нет
- Unidad 1 PDFДокумент28 страницUnidad 1 PDFHernando CarrilloОценок пока нет
- Servomotores PresentaciónДокумент16 страницServomotores PresentaciónkaracolspsyОценок пока нет
- Paper 'Análisis de Fenómenos Dinámicos en Sistemas de Potencia'Документ6 страницPaper 'Análisis de Fenómenos Dinámicos en Sistemas de Potencia'Martha CardonaОценок пока нет
- APLICACION DE Automatismos PDFДокумент4 страницыAPLICACION DE Automatismos PDFRoger Joel PaxОценок пока нет
- Tableros ElèctricosДокумент56 страницTableros ElèctricosOscar Gutarra QuispeОценок пока нет
- Foco PDFДокумент19 страницFoco PDFJoselyn MarilynОценок пока нет
- Mantenimiento equipos concentradora plantaДокумент1 страницаMantenimiento equipos concentradora plantaElmer HuashuayoОценок пока нет
- Aumento corriente controlada rectificadores emergencia plantas electroobtención cobreДокумент5 страницAumento corriente controlada rectificadores emergencia plantas electroobtención cobreCristian Jesus Peinado Pacheco100% (1)
- Subestaciones de Potencia: Lionel Machaca Herrera Ingeniero ElectromecánicoДокумент20 страницSubestaciones de Potencia: Lionel Machaca Herrera Ingeniero ElectromecánicoEdson AlbaОценок пока нет
- Arranque Directo Con Inversion de GiroДокумент8 страницArranque Directo Con Inversion de GiroMiguel ZPОценок пока нет
- Laboratorio 9 Sistemas de Potencia Gilberto Garrido Keysi BurgosДокумент7 страницLaboratorio 9 Sistemas de Potencia Gilberto Garrido Keysi BurgosGilberto Garrido ABОценок пока нет
- Pruebas en MedidoresДокумент10 страницPruebas en MedidoresFelipe MelgarejoОценок пока нет
- Artículo: Eficiencia Energética y Medio Ambiente en Ingenio Ofelina PanamáДокумент5 страницArtículo: Eficiencia Energética y Medio Ambiente en Ingenio Ofelina PanamáJulio BarraganОценок пока нет
- Elec. PotenciaДокумент16 страницElec. Potenciaalejandra caveroОценок пока нет
- Taller 1Документ7 страницTaller 1Anderson Enriquez CastroОценок пока нет
- INFORME DE LABORATORIO Previo 2Документ19 страницINFORME DE LABORATORIO Previo 2Carlos AndrésОценок пока нет
- Practica 5 Relé InteligenteДокумент10 страницPractica 5 Relé InteligenteReyKiremОценок пока нет
- Ogata - 5ta Sistemas Hidraulicos TanquesДокумент10 страницOgata - 5ta Sistemas Hidraulicos TanquesJosue BarreraОценок пока нет
- Resumen SeccionadoresДокумент6 страницResumen SeccionadoresAnder ArmasОценок пока нет
- TSK Con PLC Siemmens s7-300Документ11 страницTSK Con PLC Siemmens s7-300Freddy Jesus Ingaruca OrihuelaОценок пока нет
- Graf CetДокумент45 страницGraf CetMarben PazОценок пока нет
- Plan de Seguridad y Salud JardinДокумент26 страницPlan de Seguridad y Salud JardinmorillosopankevinОценок пока нет
- Pa 2 - Laboratorio de Liderazgo OkДокумент4 страницыPa 2 - Laboratorio de Liderazgo OkCatalina Ancalla AraujoОценок пока нет
- Matematicas Ejercicios Del Tercer Bimestre de Primero de SecundariaДокумент15 страницMatematicas Ejercicios Del Tercer Bimestre de Primero de SecundariaEstivens VasquezОценок пока нет
- Compresibilidad y Asentamientos v2020Документ64 страницыCompresibilidad y Asentamientos v2020Luis Felipe Guzman PulidoОценок пока нет
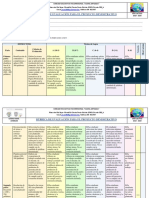
- Rúbrica de evaluación para proyecto demostrativoДокумент5 страницRúbrica de evaluación para proyecto demostrativoAndrewAndy100% (2)
- Ensayo Simce 1° Medio (Número Ii)Документ15 страницEnsayo Simce 1° Medio (Número Ii)Francesca MuñozОценок пока нет
- H.V. Psicóloga 2016.Документ6 страницH.V. Psicóloga 2016.Ángel Lozano PatiñoОценок пока нет
- Taller 2. PROCESO PRODUCTO Y COMERCIAL.Документ7 страницTaller 2. PROCESO PRODUCTO Y COMERCIAL.Maria Andrea OrtegaОценок пока нет
- Datos Del Estudio de Mecanica de SuelosДокумент58 страницDatos Del Estudio de Mecanica de Suelosaldo15Оценок пока нет
- Modelo Matriz Competencias Capacidades e Indicadores Del Las Area de Ciencia Tecnología y Ambiente RM NДокумент13 страницModelo Matriz Competencias Capacidades e Indicadores Del Las Area de Ciencia Tecnología y Ambiente RM NSam JinesОценок пока нет
- LIBRO TOMO 1 Refinacion PDFДокумент128 страницLIBRO TOMO 1 Refinacion PDFRuth Rios PardoОценок пока нет
- Auditor Interno Calidad ISO 9001TUeV RheinlandДокумент1 страницаAuditor Interno Calidad ISO 9001TUeV RheinlandJairoAparicioTorresОценок пока нет
- HistorialClinicoPsicologiaForenseДокумент4 страницыHistorialClinicoPsicologiaForenseRaquel Diaz Ortiz0% (2)
- Cálculo PlásticoДокумент10 страницCálculo Plásticojo_jose71960Оценок пока нет
- Solucionario 1er Simulacro Cpu - Sigmath 2011 - IIДокумент10 страницSolucionario 1er Simulacro Cpu - Sigmath 2011 - IIKarina Aguedo Milla100% (2)
- Maqtermicas2019 PDFДокумент114 страницMaqtermicas2019 PDFJimmy MorochiОценок пока нет
- DRAGHI LUCERO, Juan. La Libertad Del NegroДокумент6 страницDRAGHI LUCERO, Juan. La Libertad Del NegroAnabel Loza SubiaОценок пока нет
- Evolución de Los Puentes Atirantados - Chile2014 - Sima-Stockhusen SpaДокумент8 страницEvolución de Los Puentes Atirantados - Chile2014 - Sima-Stockhusen SpaFernando SimaОценок пока нет
- Torches - Foster The People - MP3 DownloadsДокумент6 страницTorches - Foster The People - MP3 DownloadsImpulso DigitalОценок пока нет
- Reforma agraria en ColombiaДокумент2 страницыReforma agraria en ColombiaSARA ESTEFANIA HERNANDEZ ARBOLEDAОценок пока нет
- Manual de Frutas MinionsДокумент8 страницManual de Frutas MinionsUSUARIO MARCEОценок пока нет
- Definicion de Los Metodos de Diseño Elastico y PlasticoДокумент12 страницDefinicion de Los Metodos de Diseño Elastico y PlasticoAlberto Flores Cordova71% (7)
- CentralesДокумент37 страницCentralesAnally Julia Maita MuchaОценок пока нет
- POLIESTIRENOДокумент27 страницPOLIESTIRENOLuzel Manuela Diaz Reyes100% (1)
- Nuestro Libro (Real) de Proyectos 3ergradoДокумент321 страницаNuestro Libro (Real) de Proyectos 3ergradoAlma Velia Lora ÁngelesОценок пока нет
- PROYECTO CHANCAdoraДокумент35 страницPROYECTO CHANCAdoraWenderGarcía50% (2)
- Recomendaciones para El Uso Del Correo InstitucionalДокумент3 страницыRecomendaciones para El Uso Del Correo InstitucionalEsteban Arias AyardeОценок пока нет
- Rubrica Informe AciДокумент3 страницыRubrica Informe AcigommmoОценок пока нет
- T Uce 0010 086 2017Документ172 страницыT Uce 0010 086 2017Laura SuarezОценок пока нет
- Tipos de datos en programaciónДокумент10 страницTipos de datos en programaciónlol coitaОценок пока нет