Вам также может понравиться
- Manufacturing Egg Trays from Waste PaperДокумент17 страницManufacturing Egg Trays from Waste Paperravibarora86% (7)
- 1HD-T - 1 Land Cruiser Engine Service ManualДокумент26 страниц1HD-T - 1 Land Cruiser Engine Service ManualMichael Dzidowski86% (7)
- Adjustment Models in 3D Geomatics and Computational Geophysics: With MATLAB ExamplesОт EverandAdjustment Models in 3D Geomatics and Computational Geophysics: With MATLAB ExamplesОценок пока нет
- Singularities of Robot MechanismsДокумент201 страницаSingularities of Robot MechanismsAnonymous BW9mIv22N100% (1)
- Introduction To Genetic Algorithms For Scientists and - Engineers by David ColeyДокумент211 страницIntroduction To Genetic Algorithms For Scientists and - Engineers by David ColeysubhajitsarkarОценок пока нет
- Bijan PHD PDFДокумент175 страницBijan PHD PDFAdetoro Mal PascalОценок пока нет
- Ant Colony OptДокумент51 страницаAnt Colony OptRavi TejaОценок пока нет
- Thesis David PozoДокумент198 страницThesis David PozoJorge Hans Alayo GamarraОценок пока нет
- Eecs 2012 217Документ202 страницыEecs 2012 217Anonymous lEBdswQXmxОценок пока нет
- Theme Thesis 182Документ8 страницTheme Thesis 182HelpWithPaperWritingUK100% (2)
- ThesisДокумент148 страницThesisDjedili AmelОценок пока нет
- Hoessen PDFДокумент152 страницыHoessen PDFjohnnypainОценок пока нет
- Bachelor Thesis BWL PDFДокумент5 страницBachelor Thesis BWL PDFWriteMyPaperForMoneyUK100% (2)
- Simultaneous Generalized Hill Climbing Algorithms For Addressing Sets of Discrete Optimization ProblemsДокумент116 страницSimultaneous Generalized Hill Climbing Algorithms For Addressing Sets of Discrete Optimization ProblemslearusbОценок пока нет
- MS Thesis PSO AlgorithmДокумент65 страницMS Thesis PSO AlgorithmChen Chee Jung100% (1)
- MSC Thesis ExampleДокумент5 страницMSC Thesis Exampleafkololop100% (1)
- Thesis Report NewДокумент97 страницThesis Report Newnamrata singhОценок пока нет
- Space Time Code DivisionДокумент281 страницаSpace Time Code Divisionneek4uОценок пока нет
- Evolutionary Computation: One Project, Many DirectionsДокумент2 страницыEvolutionary Computation: One Project, Many Directionsshabir AhmadОценок пока нет
- PathДокумент6 страницPathKhushin LakharaОценок пока нет
- Modern Structural AnalysisДокумент26 страницModern Structural Analysiswalter_m_cdr50% (4)
- Epq Dissertation StructureДокумент4 страницыEpq Dissertation StructurePaperWritingServicePortland100% (1)
- Empirical Verification of Modeled Queue LengthsДокумент107 страницEmpirical Verification of Modeled Queue LengthsAmul ShresthaОценок пока нет
- Predicting Structured DataДокумент29 страницPredicting Structured DatahmnaikОценок пока нет
- Banasiak J. Evolutionary Equations With Applications in Natural Sciences 2015Документ505 страницBanasiak J. Evolutionary Equations With Applications in Natural Sciences 2015lkjggfddd100% (1)
- Evaluating Transportation Projects with Microsimulation ModelingДокумент168 страницEvaluating Transportation Projects with Microsimulation ModelingTATATAHERОценок пока нет
- INFO: An Efficient Optimization Algorithm Based On Weighted Mean of VectorsДокумент55 страницINFO: An Efficient Optimization Algorithm Based On Weighted Mean of VectorsalihОценок пока нет
- Bachelor Thesis ModeДокумент5 страницBachelor Thesis Modebrittanyeasonlowell100% (1)
- M.C.a.sem III Operation Research 1Документ50 страницM.C.a.sem III Operation Research 1Pankaj SatkarОценок пока нет
- Help Bachelor ThesisДокумент7 страницHelp Bachelor ThesisHolly Fisher100% (2)
- Spectogram Hata PDFДокумент9 страницSpectogram Hata PDFahmetygtОценок пока нет
- Abstract Algebra Theory and PracticeДокумент424 страницыAbstract Algebra Theory and PracticebobОценок пока нет
- Thesis 2.1 Landing PageДокумент6 страницThesis 2.1 Landing Pagelynnwebersaintpaul100% (1)
- A New Heuristic Optimization Algorithm - Harmony Search Zong Woo Geem, Joong Hoon Kim, Loganathan, G.V.Документ10 страницA New Heuristic Optimization Algorithm - Harmony Search Zong Woo Geem, Joong Hoon Kim, Loganathan, G.V.Anonymous BQrnjRaОценок пока нет
- Thesis On Simulation ModelДокумент7 страницThesis On Simulation ModelSabrina Ball100% (1)
- PreviewДокумент24 страницыPreviewhuynh nguyen dinhОценок пока нет
- Cbs Master Thesis Hand inДокумент7 страницCbs Master Thesis Hand inBuyCollegeEssaysPueblo100% (2)
- An overview of swarm intelligence and ant colony optimization heuristicsДокумент25 страницAn overview of swarm intelligence and ant colony optimization heuristicsShubham SethiОценок пока нет
- Innovative Methodologies in Evolution StrategiesДокумент62 страницыInnovative Methodologies in Evolution StrategiesGerhard HerresОценок пока нет
- 1-FEAC Final PDFДокумент313 страниц1-FEAC Final PDFOmer TokhОценок пока нет
- Efficient Algorithms for Molecular Dynamics SimulationsДокумент7 страницEfficient Algorithms for Molecular Dynamics SimulationsMoUnTaIn BoYОценок пока нет
- Elements of Applied Probability For Engineering, Mathematics and Systems ScienceДокумент375 страницElements of Applied Probability For Engineering, Mathematics and Systems ScienceBORNASCHОценок пока нет
- DM Project 3Документ20 страницDM Project 3api-672531815Оценок пока нет
- Solution Methodology Based Genetic Algorithm For Multi-Objective Facility Layout ProblemДокумент143 страницыSolution Methodology Based Genetic Algorithm For Multi-Objective Facility Layout ProblemShailesh KhareОценок пока нет
- Computers in Science Education: Dr. Vasant D. BarveДокумент9 страницComputers in Science Education: Dr. Vasant D. BarveNikhil SoodОценок пока нет
- Master Thesis Guidelines VubДокумент6 страницMaster Thesis Guidelines Vubkatieellismanchester100% (2)
- Pardo 2012 OptimisationДокумент322 страницыPardo 2012 Optimisationvicon16138Оценок пока нет
- FHNW Bachelor Thesis WegleitungДокумент7 страницFHNW Bachelor Thesis Wegleitungjennyalexanderboston100% (2)
- Thesis TDXДокумент7 страницThesis TDXPaySomeoneToWriteMyPaperSingapore100% (1)
- Sehestedt PHD ThesisДокумент212 страницSehestedt PHD ThesisZulkarnain ZainudinОценок пока нет
- OBJ DatastreamДокумент109 страницOBJ Datastreammarica DolorОценок пока нет
- Quantum Algorithm Design Techniques and ApplicationsДокумент79 страницQuantum Algorithm Design Techniques and ApplicationsAddy EmmanuelОценок пока нет
- Computational Intelligence Based Machine Fault DiagnosisДокумент5 страницComputational Intelligence Based Machine Fault DiagnosisvandersonpcОценок пока нет
- Bachelor Thesis Eth MavtДокумент8 страницBachelor Thesis Eth Mavtafcmqldsw100% (2)
- White Board EraserДокумент39 страницWhite Board EraserThom Ello Dalde50% (2)
- PhDthesis B DefournyДокумент200 страницPhDthesis B DefournySmritiShyamalОценок пока нет
- Novel Mechanical Mechanisms For The Development of Undergraduate KnowledgeДокумент50 страницNovel Mechanical Mechanisms For The Development of Undergraduate KnowledgeYuva NОценок пока нет
- Quotient Space Based Problem Solving: A Theoretical Foundation of Granular ComputingОт EverandQuotient Space Based Problem Solving: A Theoretical Foundation of Granular ComputingОценок пока нет
- Fundamentals of Optimization Techniques with AlgorithmsОт EverandFundamentals of Optimization Techniques with AlgorithmsРейтинг: 5 из 5 звезд5/5 (1)
- Orloff Complex VariableДокумент291 страницаOrloff Complex VariableMelodyОценок пока нет
- Class Tabu SearchДокумент56 страницClass Tabu SearchMwakidОценок пока нет
- Tabu SearchДокумент18 страницTabu SearchtrivilintarolasОценок пока нет
- Uav Path Planning in Search OperationsДокумент14 страницUav Path Planning in Search OperationsMwakidОценок пока нет
- Aegypten MinenДокумент34 страницыAegypten MinenMwakidОценок пока нет
- Virtual Spring Coordination for 3D Flying VehiclesДокумент8 страницVirtual Spring Coordination for 3D Flying VehiclesMwakidОценок пока нет
- Ece3414magnetic CircuitsДокумент20 страницEce3414magnetic Circuitsvasuki1964Оценок пока нет
- MDA Chap1 SS2010Документ21 страницаMDA Chap1 SS2010MwakidОценок пока нет
- Player Alex's SEO-Optimized Character Sheet for Antero VipunenДокумент2 страницыPlayer Alex's SEO-Optimized Character Sheet for Antero VipunenAlex AntiaОценок пока нет
- Updated After 11th BoS Course Curriculum - B.tech CSEДокумент120 страницUpdated After 11th BoS Course Curriculum - B.tech CSEAnonymous 9etQKwWОценок пока нет
- Damage To Stern Tube Bearing and SealsДокумент4 страницыDamage To Stern Tube Bearing and SealsJoão Henrique Volpini MattosОценок пока нет
- RS-485 2X227 AWG SFUTP PVC - 9FY7F1V129 - V - 1 - R - 1Документ2 страницыRS-485 2X227 AWG SFUTP PVC - 9FY7F1V129 - V - 1 - R - 1jeffv65Оценок пока нет
- Smart Payment MeterДокумент2 страницыSmart Payment MeterJesus Castro OrozcoОценок пока нет
- YEZ-Conical Brake MotorДокумент3 страницыYEZ-Conical Brake MotorMech MallОценок пока нет
- Chap1-Geometrical Optics - ExercisesДокумент3 страницыChap1-Geometrical Optics - ExercisesReema HlohОценок пока нет
- MGS3750 28FДокумент4 страницыMGS3750 28FAndi Z Pasuloi PatongaiОценок пока нет
- Library Management System Project ReportДокумент50 страницLibrary Management System Project ReportSURAJ GAMINGОценок пока нет
- Write Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersДокумент9 страницWrite Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersLexi TronicsОценок пока нет
- Siemens 1LE1 PDFДокумент308 страницSiemens 1LE1 PDFharold100% (1)
- Royal 3KW Solar System: Ref: RSE/SQ/804/2020 Date: 09-28-2020 Sale QuotationДокумент3 страницыRoyal 3KW Solar System: Ref: RSE/SQ/804/2020 Date: 09-28-2020 Sale Quotationmuhammad aliОценок пока нет
- HTML Project RestaurantДокумент8 страницHTML Project RestaurantSandeep Chowdary0% (1)
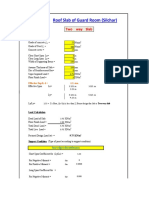
- Roof Slab of Guard RoomДокумент3 страницыRoof Slab of Guard RoomAditya KumarОценок пока нет
- 176Документ3 страницы176Karthik AmigoОценок пока нет
- Inspection and Maintenance of Drillpipe Ebook PDFДокумент39 страницInspection and Maintenance of Drillpipe Ebook PDFAntónio OliveiraОценок пока нет
- GPT 1-15 LineBackerДокумент4 страницыGPT 1-15 LineBackerazadeazОценок пока нет
- Alpema Standerd For Brazed Aluminium Plate-Fin Heat ExchДокумент78 страницAlpema Standerd For Brazed Aluminium Plate-Fin Heat ExchBilal NazirОценок пока нет
- Mechanical Engineer Resume - Digambar BhangeДокумент3 страницыMechanical Engineer Resume - Digambar BhangeTOP DHAMAKAОценок пока нет
- The Causes of Shear Cracking in Prestressed Concrete Box Girder BridgesДокумент10 страницThe Causes of Shear Cracking in Prestressed Concrete Box Girder BridgesVipin Kumar ParasharОценок пока нет
- E12817 GT AC5300 Manual EnglishДокумент152 страницыE12817 GT AC5300 Manual Englishlegato1984Оценок пока нет
- CSE Catalog - IndiaДокумент67 страницCSE Catalog - IndiaDheeraj SivadasОценок пока нет
- Qcs 2010 Section 5 Part 8 Transportation and Placing of ConcreteДокумент7 страницQcs 2010 Section 5 Part 8 Transportation and Placing of Concretebryanpastor106Оценок пока нет
- RDSO - Specification No.M&C NDT 125 2004 Rev IДокумент6 страницRDSO - Specification No.M&C NDT 125 2004 Rev INiking ThomsanОценок пока нет
- Strength of A440 Steel Joints Connected With A325 Bolts PublicatДокумент52 страницыStrength of A440 Steel Joints Connected With A325 Bolts Publicathal9000_mark1Оценок пока нет
- 3., 4., & 9. RBXC Catalogue Local 2015Документ16 страниц3., 4., & 9. RBXC Catalogue Local 2015Nilesh RanadeviОценок пока нет
- Unban FormsДокумент74 страницыUnban FormsNoob ab AbОценок пока нет