
Вам также может понравиться
- Cuestionario (Repaso Prueba)Документ3 страницыCuestionario (Repaso Prueba)Bruno Demmian Cabrera LetzkusОценок пока нет
- Dvce 0001 PDFДокумент9 страницDvce 0001 PDFBruno Demmian Cabrera LetzkusОценок пока нет
- Plan de Salud Cruz Blanca PDFДокумент2 страницыPlan de Salud Cruz Blanca PDFBruno Demmian Cabrera LetzkusОценок пока нет
- 8BK20 Catalogo ARGДокумент0 страниц8BK20 Catalogo ARGBruno Demmian Cabrera LetzkusОценок пока нет
- Academia Mexicana de Derechos HumanosДокумент2 страницыAcademia Mexicana de Derechos HumanosAndrés ArellanoОценок пока нет
- Uso Actual Suelos Región CuscoДокумент1 страницаUso Actual Suelos Región CuscoSamuel Kjuro ArenasОценок пока нет
- Caso Esqueletos en El ArmarioДокумент2 страницыCaso Esqueletos en El ArmarioAlejandra Contreras0% (1)
- Justificación Del Uso Del Cuaderno para 3 A PreescolarДокумент5 страницJustificación Del Uso Del Cuaderno para 3 A PreescolarCaro Maya100% (1)
- Galvanizadora CEMESA-ESP'ESOR - GALVANIZADOДокумент7 страницGalvanizadora CEMESA-ESP'ESOR - GALVANIZADOUlises CardenasОценок пока нет
- Correspondencia Comercial 28367 Completo PDFДокумент24 страницыCorrespondencia Comercial 28367 Completo PDFjvperez1163Оценок пока нет
- Moda Pasajera o TendenciaДокумент2 страницыModa Pasajera o TendenciaDaya AcostaОценок пока нет
- Ficha de Notificacion SisvesoДокумент2 страницыFicha de Notificacion SisvesoJohanna VargasОценок пока нет
- Influencia de Las Peliculas Animadas de Disney en Los Niños de América Desde La Década de 1950 Hasta La Actualidad. UPC-PERUДокумент38 страницInfluencia de Las Peliculas Animadas de Disney en Los Niños de América Desde La Década de 1950 Hasta La Actualidad. UPC-PERUDanielChipana67% (3)
- COMUNICACIÓN ExamenДокумент3 страницыCOMUNICACIÓN ExamenDidi Dominguez QuispeОценок пока нет
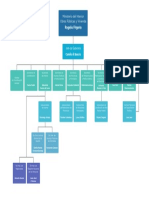
- Organigrama Ministerio Del Interior 1 - ARGENTINAДокумент1 страницаOrganigrama Ministerio Del Interior 1 - ARGENTINAdaniel muñozОценок пока нет
- Une 20323 1978Документ4 страницыUne 20323 1978haroldalconzОценок пока нет
- Programacion de Llaves ToyotaДокумент30 страницProgramacion de Llaves ToyotaServicio Integral del EsteОценок пока нет
- Trabajo1GOPSMBA33AGrupo2 PacificoVidav6Документ16 страницTrabajo1GOPSMBA33AGrupo2 PacificoVidav6Atik NaiОценок пока нет
- Plantas Utiles de BailadoresДокумент27 страницPlantas Utiles de Bailadoresveliger2009Оценок пока нет
- Cracker Book by Vlad Acid Raven El PadrinoДокумент169 страницCracker Book by Vlad Acid Raven El Padrinodsdsfgfdgfd100% (1)
- Dilemas Eticos en La EducacionДокумент3 страницыDilemas Eticos en La EducacionLuis henryОценок пока нет
- Viii Experiencia de Aprendizaje - Act 3 - 1 y 2 GradoДокумент5 страницViii Experiencia de Aprendizaje - Act 3 - 1 y 2 GradoHeber ApazaОценок пока нет
- Kandy Frescia Cambio ApellidoДокумент6 страницKandy Frescia Cambio Apellidowalter gomez tamayoОценок пока нет
- El Problema Del Aseguramiento Del EstatusДокумент2 страницыEl Problema Del Aseguramiento Del EstatusGustavo Rodríguez GarcíaОценок пока нет
- Comentario de La Novela de J. EstevezДокумент4 страницыComentario de La Novela de J. EstevezHugo UltraОценок пока нет
- Script Conferencia Perfectos DragonesДокумент11 страницScript Conferencia Perfectos DragonesdibuyoОценок пока нет
- Actividad 3 - 100 Cosas Antes de MorirДокумент5 страницActividad 3 - 100 Cosas Antes de MorirKenia Abigail BussónОценок пока нет
- BEFRAGUEДокумент2 страницыBEFRAGUEMateo Camilo AstudilloОценок пока нет
- Clase 24 Mayo NaturalesДокумент2 страницыClase 24 Mayo NaturalesTania De la RosaОценок пока нет
- Hoja para Calculos Sesión 3 SMV VERANOДокумент22 страницыHoja para Calculos Sesión 3 SMV VERANOBrando Bao CruzattiОценок пока нет
- Busso, PaulaДокумент18 страницBusso, PaulaBIBHUMAОценок пока нет
- BARRENADOДокумент7 страницBARRENADODavid PichogagónОценок пока нет
- Guia - 7 - Estructuración de Planes de NegociosДокумент42 страницыGuia - 7 - Estructuración de Planes de NegociosSebastian Vega HernandezОценок пока нет
- ADMINISTRACION DE PRESUPUESTOS. Mauricio GómezДокумент124 страницыADMINISTRACION DE PRESUPUESTOS. Mauricio GómezDolly Castillo MontañoОценок пока нет
- Fundamentos de matemática: Introducción al nivel universitarioОт EverandFundamentos de matemática: Introducción al nivel universitarioРейтинг: 3 из 5 звезд3/5 (9)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleОт EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleРейтинг: 5 из 5 звезд5/5 (3)
- Guía práctica para la refracción ocularОт EverandGuía práctica para la refracción ocularРейтинг: 5 из 5 звезд5/5 (2)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalОт EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalРейтинг: 5 из 5 звезд5/5 (3)
- Armónicas en Sistemas Eléctricos IndustrialesОт EverandArmónicas en Sistemas Eléctricos IndustrialesРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.От EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Рейтинг: 4.5 из 5 звезд4.5/5 (9)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiОт EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiРейтинг: 3.5 из 5 звезд3.5/5 (5)
- La Guía Definitiva en Matemáticas para el Ingreso a la UniversidadОт EverandLa Guía Definitiva en Matemáticas para el Ingreso a la UniversidadРейтинг: 4 из 5 звезд4/5 (11)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaОт EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaРейтинг: 4 из 5 звезд4/5 (32)










































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-2-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)





