Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Technical Bid Evaluation for Electrical WorksДокумент14 страницTechnical Bid Evaluation for Electrical WorksNavneet SinghОценок пока нет
- Power System Analysis - Stevenson - Grainger - AnnexДокумент5 страницPower System Analysis - Stevenson - Grainger - AnnexSaghir AhmadОценок пока нет
- List of Mandatory Documents & Check ListДокумент6 страницList of Mandatory Documents & Check ListDuraipandi RajaОценок пока нет
- Certc: Mathematics Refresher 2Документ4 страницыCertc: Mathematics Refresher 2Hary Kriz100% (1)
- ASTM Conductor Spec SheetsДокумент27 страницASTM Conductor Spec Sheetsjavad4531Оценок пока нет
- Alicja Wasik - Covering LetterДокумент1 страницаAlicja Wasik - Covering LetterAla WasikОценок пока нет
- SGT - Constitution and BylawsДокумент48 страницSGT - Constitution and BylawsAla WasikОценок пока нет
- l02 4upДокумент8 страницl02 4upAla WasikОценок пока нет
- Intro 4upДокумент9 страницIntro 4upAla WasikОценок пока нет
- Personal StatesmentДокумент1 страницаPersonal StatesmentAla WasikОценок пока нет
- Control With Matlab - Part IДокумент17 страницControl With Matlab - Part IAla WasikОценок пока нет
- Contol Sytem Design Assignment - Alicja Wasik - REVISEDДокумент8 страницContol Sytem Design Assignment - Alicja Wasik - REVISEDAla WasikОценок пока нет
- 1202 Frls Cable SpecsДокумент4 страницы1202 Frls Cable Specsparesh joshiОценок пока нет
- International Journal of Modelling Simulation and Applications IJMSAДокумент1 страницаInternational Journal of Modelling Simulation and Applications IJMSAijmsaОценок пока нет
- 4 Glynn and Devlin An X Band Gan Pa Mmic For PДокумент8 страниц4 Glynn and Devlin An X Band Gan Pa Mmic For PRAJAОценок пока нет
- 004 TFDJ 042 Yiedqzosd 0 Aglsj 4 PyДокумент9 страниц004 TFDJ 042 Yiedqzosd 0 Aglsj 4 Py一鸿Оценок пока нет
- Using Labview To Measure Temperature With A ThermistorДокумент18 страницUsing Labview To Measure Temperature With A ThermistorjdaudpotoОценок пока нет
- Feedback vs feedforward CM control: comparative studyДокумент4 страницыFeedback vs feedforward CM control: comparative studysuryaОценок пока нет
- 7011a 6-10kva SpecsДокумент10 страниц7011a 6-10kva SpecsOscar MorenoОценок пока нет
- Reduction of Multiple Control SubsystemsДокумент21 страницаReduction of Multiple Control Subsystemsandik yuliantoОценок пока нет
- AN29160AA Product Standards Technical Data Sheet</TITLEДокумент60 страницAN29160AA Product Standards Technical Data Sheet</TITLEdimaОценок пока нет
- ATS2M1-1-16A-230VДокумент2 страницыATS2M1-1-16A-230Vmariam fekiОценок пока нет
- 9 Wireless Power Transfer Projects PDF: Accelerate Your InnovationДокумент15 страниц9 Wireless Power Transfer Projects PDF: Accelerate Your InnovationSouvik KoleОценок пока нет
- SS XXXBSActivePFCДокумент1 страницаSS XXXBSActivePFCmropzОценок пока нет
- Desk Microphone Power-On and PTT IndicatorsДокумент5 страницDesk Microphone Power-On and PTT IndicatorsSergio Eduardo FreitasОценок пока нет
- Atto Farad DetectionДокумент133 страницыAtto Farad DetectionrobidjoОценок пока нет
- Optically Coupled 20 Ma Current Loop Receiver: HCPL-4200Документ13 страницOptically Coupled 20 Ma Current Loop Receiver: HCPL-4200bigm94iОценок пока нет
- Product datasheet for Eveready 4R25 6V batteryДокумент2 страницыProduct datasheet for Eveready 4R25 6V batteryMarcelo DanieliОценок пока нет
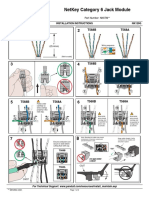
- Install Instructions NetKey Category 6 Jack Module - TERMINACION CON LLAVEДокумент2 страницыInstall Instructions NetKey Category 6 Jack Module - TERMINACION CON LLAVEMonte PlataОценок пока нет
- Practical Electronics 1969 07Документ76 страницPractical Electronics 1969 07Carlos SoaresОценок пока нет
- DC - DC Vicore Arc1000 PDFДокумент2 страницыDC - DC Vicore Arc1000 PDFsrijithbpillai7087Оценок пока нет
- Position Sensor: Type 1Документ2 страницыPosition Sensor: Type 1Karsim BoimОценок пока нет
- Net Metering System One Line DiagramДокумент1 страницаNet Metering System One Line DiagramEarl Jenn AbellaОценок пока нет
- Uniform Plane WaveДокумент63 страницыUniform Plane WavesabbithiОценок пока нет
- ENG - 7 - Electrical Resistance Strain Gages PDFДокумент16 страницENG - 7 - Electrical Resistance Strain Gages PDFBogdan BumbaceaОценок пока нет
- 6 Ports Antenna Datasheet PDFДокумент2 страницы6 Ports Antenna Datasheet PDFСергей МирошниченкоОценок пока нет
- Composite Video SignalДокумент17 страницComposite Video SignalKashyap MistryОценок пока нет