Вам также может понравиться
- El Sentido Del TactoДокумент5 страницEl Sentido Del TactoJazmín MartínezОценок пока нет
- Tema 3Документ24 страницыTema 3797066Оценок пока нет
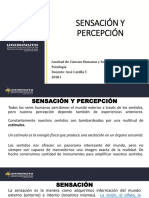
- Sensación y PercepciónДокумент8 страницSensación y Percepciónsory celedonioОценок пока нет
- Tacto y DolorДокумент3 страницыTacto y DolorSalvador OrtegaОценок пока нет
- Sentido CinestesicoДокумент3 страницыSentido Cinestesicomoon100% (2)
- Monografia Sensibilidad y Tendencias. Antropologia.Документ7 страницMonografia Sensibilidad y Tendencias. Antropologia.Ángeles AcostaОценок пока нет
- 3 Tema 2 PDFДокумент3 страницы3 Tema 2 PDFMariangel StredelОценок пока нет
- Protocolo 14 Sensibilidad CutaneaДокумент31 страницаProtocolo 14 Sensibilidad CutaneaMYRAMY ABRILОценок пока нет
- Universidad Ual Alfa LambdaДокумент12 страницUniversidad Ual Alfa LambdaGaby GómezОценок пока нет
- Percepcion TactilДокумент23 страницыPercepcion TactilArmando Mamani ChallapaОценок пока нет
- The Perceptions Module of Percepnet Promotes Critical Discussion About Hot Issues in Sensory Science and PerceptionДокумент3 страницыThe Perceptions Module of Percepnet Promotes Critical Discussion About Hot Issues in Sensory Science and PerceptionmarcialОценок пока нет
- Anatomía Del TactoДокумент3 страницыAnatomía Del TactoJosé Pacheco De Sousa100% (1)
- Cap 16. Sentidos CutáneosДокумент5 страницCap 16. Sentidos CutáneosstephanieОценок пока нет
- Sindrome SensitivoДокумент12 страницSindrome SensitivoOrianny Quijada MolinaОценок пока нет
- Sensaciones SomaticasДокумент48 страницSensaciones SomaticasNahuel MendozaОценок пока нет
- Cuestionario Capítulo 48Документ5 страницCuestionario Capítulo 48EronОценок пока нет
- La Sensación Es El Modo Más Elemental Que Utiliza El Hombre para Extraer Información de Su EntornoДокумент2 страницыLa Sensación Es El Modo Más Elemental Que Utiliza El Hombre para Extraer Información de Su EntornoYeini PeñaОценок пока нет
- Procesos Senso-PerceptivosДокумент43 страницыProcesos Senso-Perceptivoslibros_pdf100% (1)
- Taller Procesos Basicos de PsicologiaДокумент9 страницTaller Procesos Basicos de PsicologiaJOSELYN NAYELY LAYEDRA MINDIOLAОценок пока нет
- SENSOPERCEPCIÓNДокумент7 страницSENSOPERCEPCIÓNbrandoОценок пока нет
- Informe Biologia-Tacto y Sensibilidad DiferencialДокумент55 страницInforme Biologia-Tacto y Sensibilidad DiferencialCarito Muñoz CatalanОценок пока нет
- MecanorrecepciónДокумент14 страницMecanorrecepciónFernando Akatsuki33% (3)
- Sensorialidad BásicaДокумент15 страницSensorialidad BásicaElena RodeОценок пока нет
- Otros Tipos de Percepción - Percepción Del TactoДокумент9 страницOtros Tipos de Percepción - Percepción Del TactoANA MARITZA BELLO MARTINEZОценок пока нет
- Sentido Del TactoДокумент4 страницыSentido Del Tactorobertocarlos tapia calleОценок пока нет
- Ayudas DidacticasДокумент207 страницAyudas DidacticasPio GozaОценок пока нет
- TactoДокумент4 страницыTactokerrymolina99Оценок пока нет
- Práctica 10 Sistema SensorialДокумент5 страницPráctica 10 Sistema SensorialJuanОценок пока нет
- El TaactoДокумент2 страницыEl TaactoRonal PastranОценок пока нет
- Receptores Sensoriales Foro Sem 2 Procesos Psicológicos Básicos UTPLДокумент2 страницыReceptores Sensoriales Foro Sem 2 Procesos Psicológicos Básicos UTPLThalía San AntonioОценок пока нет
- Temas PercepciónДокумент16 страницTemas PercepciónDAURA MEDINA HERNÁNDEZОценок пока нет
- Sistema Sensorial SomáticoДокумент8 страницSistema Sensorial SomáticoJose Grey DRОценок пока нет
- Taller Procesos Basicos de PsicologiaДокумент9 страницTaller Procesos Basicos de PsicologiaJOSELYN NAYELY LAYEDRA MINDIOLAОценок пока нет
- Sensación y PercepciónДокумент14 страницSensación y PercepciónJessica FagoagaОценок пока нет
- Sensacion y PercepcionДокумент8 страницSensacion y PercepcionAbigail DavalosОценок пока нет
- Capítulo 16Документ4 страницыCapítulo 16Francia Rodriguez DeffitОценок пока нет
- TactoДокумент9 страницTactoRosalinda DíazОценок пока нет
- La Sensacion y PercepcionДокумент9 страницLa Sensacion y PercepcionWilliam Arias HRОценок пока нет
- Guia SensoperceptivaДокумент6 страницGuia SensoperceptivaAnsgabrielОценок пока нет
- Informe Neuro Funciones CinestecicasДокумент19 страницInforme Neuro Funciones CinestecicasKarina Condori ChoqueОценок пока нет
- Sensibilidad en El Medio AcuaticoДокумент7 страницSensibilidad en El Medio AcuaticoLeonardoValenzuelaОценок пока нет
- Tema 3 Sensación y Percepción PDFДокумент26 страницTema 3 Sensación y Percepción PDFGabriel Monsalve GonsalezОценок пока нет
- Fisiologia Sensorial Sensibilidad SomatoestesicaДокумент9 страницFisiologia Sensorial Sensibilidad SomatoestesicaMaria IgnaciaОценок пока нет
- Sensaciones y PersepcionesДокумент41 страницаSensaciones y PersepcionesSaira RamosОценок пока нет
- Psicología IndustrialДокумент9 страницPsicología IndustrialDennisPerezОценок пока нет
- Areas de Asoiacion de La Sensibilidad SomaticaДокумент3 страницыAreas de Asoiacion de La Sensibilidad SomaticaBellaLizbethОценок пока нет
- Estructura y Funcionamiento de Los Sistemas SensorialesДокумент8 страницEstructura y Funcionamiento de Los Sistemas SensorialesCAREN SUSANA IJAJI GUERREROОценок пока нет
- Neurobiologia Del TactoДокумент8 страницNeurobiologia Del TactoLiz arosОценок пока нет
- Ensayos Sobre Las Funciones Perceptivo MotricesДокумент9 страницEnsayos Sobre Las Funciones Perceptivo MotricesLuis Eduardo Ariza CandanozaОценок пока нет
- Sentidos de La Piel PDFДокумент4 страницыSentidos de La Piel PDFRosangela BerroaОценок пока нет
- 08 - Laboratorio - Sistema SomatosensorialДокумент5 страниц08 - Laboratorio - Sistema SomatosensorialAzael RamirezОценок пока нет
- Cuáles Son Los Mecanismos de Los Procesos Sensoriales para Captar La Información Del Mundo ExternoДокумент9 страницCuáles Son Los Mecanismos de Los Procesos Sensoriales para Captar La Información Del Mundo Externoخءیسداما خںОценок пока нет
- Dolor y SomestesiaДокумент18 страницDolor y SomestesiaGustavoОценок пока нет
- BiologiaДокумент5 страницBiologiaJessica YibethОценок пока нет
- Neuro Final Final FinalДокумент50 страницNeuro Final Final FinalAgustina ImhoffОценок пока нет
- EL SENTIDO Del Tacto Comprende La Percepción de Estímulos Mecánicos Que Incluyen ContactoДокумент24 страницыEL SENTIDO Del Tacto Comprende La Percepción de Estímulos Mecánicos Que Incluyen ContactoHelmerivera HelmeriveraОценок пока нет
- Comunicación efectiva: el arte secreto de la escucha. La clave esencial para comunicación en el amor, en la vida hasta en los negocios. Una guía práctica para el desarrollo personalОт EverandComunicación efectiva: el arte secreto de la escucha. La clave esencial para comunicación en el amor, en la vida hasta en los negocios. Una guía práctica para el desarrollo personalРейтинг: 5 из 5 звезд5/5 (4)
- Psicología De La Felicidad: Ahora El Camino Al Alcance De TodosОт EverandPsicología De La Felicidad: Ahora El Camino Al Alcance De TodosОценок пока нет
- Diseñoyconstrucciondeunrobotscarautilizandomotoresdecddepasosyconescobillas PDFДокумент203 страницыDiseñoyconstrucciondeunrobotscarautilizandomotoresdecddepasosyconescobillas PDFGeo M. PoloОценок пока нет
- Dinamica de MaquinariaДокумент4 страницыDinamica de MaquinariaGeo M. PoloОценок пока нет
- Control de Velocidad y Posicion A Lazo Cerrado de Un Motor de CC Con dsPIC30F4011 PDFДокумент8 страницControl de Velocidad y Posicion A Lazo Cerrado de Un Motor de CC Con dsPIC30F4011 PDFAlejandra HernandezОценок пока нет
- Circuito Puente H PDFДокумент6 страницCircuito Puente H PDFGeo M. PoloОценок пока нет
- Catalogo Perfiles de Aluminio MOAS Nov 2012Документ39 страницCatalogo Perfiles de Aluminio MOAS Nov 2012ZMCONTROL100% (1)
- 1 Una Panoramic A de Los Robots MovilesДокумент14 страниц1 Una Panoramic A de Los Robots Movilesmicantecutly1205Оценок пока нет
- Brazo Robotico - 04 - ING - IMECA - PII - E P PDFДокумент24 страницыBrazo Robotico - 04 - ING - IMECA - PII - E P PDFGeo M. PoloОценок пока нет
- Localizacion InstalacionesДокумент25 страницLocalizacion InstalacionesJosue GutierrezОценок пока нет
- Contrato Privado Compraventa Vivienda ProyectadaДокумент7 страницContrato Privado Compraventa Vivienda ProyectadaFrancisco RosasОценок пока нет
- Diseño y Claculo de Engranes Rectos, Teorico, Asi Como Asistido Por ComputadoraДокумент130 страницDiseño y Claculo de Engranes Rectos, Teorico, Asi Como Asistido Por ComputadoraDavid Rios CruzОценок пока нет
- Motorespasoapaso PDFДокумент25 страницMotorespasoapaso PDFCarlos Mario Jimenez RamirezОценок пока нет
- Ductilidad y FragilidadДокумент26 страницDuctilidad y FragilidadalexbrsОценок пока нет
- Comunicacion 17018Документ9 страницComunicacion 17018triniramirez2000Оценок пока нет
- Blender Ja2012 PDFДокумент7 страницBlender Ja2012 PDFOrlando AlfaroОценок пока нет
- PiñonesДокумент12 страницPiñonesRodolfoGarciaОценок пока нет
- A Propósito de La GlobalizacionДокумент211 страницA Propósito de La GlobalizacionGeo M. PoloОценок пока нет
- Anexo S Guía para La Presentacion de ProyectosДокумент16 страницAnexo S Guía para La Presentacion de ProyectosGeo M. PoloОценок пока нет
- Fabricacion de MicrocomponentesДокумент16 страницFabricacion de MicrocomponentesGeo M. Polo100% (1)
- Sistemas Microelectomecánicos PDFДокумент16 страницSistemas Microelectomecánicos PDFAnonymous 6GC6ALEОценок пока нет
- Listado General Normas DIN PDFДокумент6 страницListado General Normas DIN PDFRafael Nazareno RivadeneiraОценок пока нет
- Calculo de Frecuencias para Vigas ElasticasДокумент19 страницCalculo de Frecuencias para Vigas ElasticasGeo M. PoloОценок пока нет
- Dinamica y Cinematica de Engranes RectosДокумент84 страницыDinamica y Cinematica de Engranes RectosGeo M. PoloОценок пока нет
- Rius - La Trukulenta Historia Del KapitalismoДокумент136 страницRius - La Trukulenta Historia Del KapitalismoCarlos Griman100% (6)
- Ductilidad y FragilidadДокумент26 страницDuctilidad y FragilidadalexbrsОценок пока нет
- Ts ColorДокумент2 страницыTs ColorGeo M. PoloОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Teorías de Falla Bajo Cargas EstáticasДокумент11 страницTeorías de Falla Bajo Cargas Estáticascadecastro100% (3)
- MathematicaДокумент6 страницMathematicaGeo M. PoloОценок пока нет
- 7 - ColumnasДокумент49 страниц7 - ColumnasJorghino Alvarado QuillaОценок пока нет
- Los Fundamentos de La LibertadДокумент7 страницLos Fundamentos de La LibertadIván Arnulfo Rojas HernándezОценок пока нет
- Diversidad Cultural Material para El DocenteДокумент522 страницыDiversidad Cultural Material para El Docentepavelbt67% (3)
- Lateralidad TFG Propuesta para Prevenir DificultadesДокумент61 страницаLateralidad TFG Propuesta para Prevenir DificultadesRobert Muñoz MartínezОценок пока нет
- Dark Blue Outer Space Achievement Certificatejunio 2 de 455567Документ1 338 страницDark Blue Outer Space Achievement Certificatejunio 2 de 455567carlos Alfonso Rivera diazОценок пока нет
- Taller Analisis Vertival y HorizontalДокумент1 страницаTaller Analisis Vertival y HorizontalZully Fontalvo100% (1)
- 2.-Cortes de Cabello para Todos Los Tipos de Rostro PDFДокумент11 страниц2.-Cortes de Cabello para Todos Los Tipos de Rostro PDFPauly Bustamante0% (1)
- Google MapsДокумент31 страницаGoogle MapsJosé lenin López Pérez 3AОценок пока нет
- Bobinas o InductoresДокумент7 страницBobinas o Inductoresmartin lili cobosОценок пока нет
- Expocision InglesДокумент2 страницыExpocision InglesEsteban Arboleda OrtizОценок пока нет
- Sádaba 2008 - La Sociedad Del Conocimiento yДокумент28 страницSádaba 2008 - La Sociedad Del Conocimiento yames12345Оценок пока нет
- Aplicación de La Topografía en Proyectos Urbanos en ColimaДокумент3 страницыAplicación de La Topografía en Proyectos Urbanos en ColimaGUIZAR PEREDIA DELIA LIZETTEОценок пока нет
- Tallernseguridadnproteccion 7565559a601ad14Документ9 страницTallernseguridadnproteccion 7565559a601ad14AndrecolinitaОценок пока нет
- RT LiderazgoДокумент13 страницRT LiderazgoCAROLINA ANDREA ACEITUNO RUIZОценок пока нет
- Diario - 2 6 22Документ12 страницDiario - 2 6 22FernandoОценок пока нет
- Ordenar Numeros en La Recta NuméricaДокумент3 страницыOrdenar Numeros en La Recta NuméricaMaria Carolina Gajardo Mattos0% (1)
- SGC-R-009 Mapeo de Procesos 2021Документ2 страницыSGC-R-009 Mapeo de Procesos 2021HectorCunoОценок пока нет
- Control de ConstitucionalidadДокумент17 страницControl de ConstitucionalidadArlet FlameОценок пока нет
- Portafolio Cocina SaludableДокумент33 страницыPortafolio Cocina SaludableLuz Stella Henao DiazОценок пока нет
- MacroeconomiaДокумент40 страницMacroeconomiagonzalezmelinabelenОценок пока нет
- AVILONAДокумент27 страницAVILONAJulio Chilet CorreaОценок пока нет
- Tecnicas ArteterapiaДокумент3 страницыTecnicas ArteterapiaMimi Meraki100% (1)
- Campos Consolidados y de Desarrollo Profesional de Los Ingenieros en MéxicoДокумент10 страницCampos Consolidados y de Desarrollo Profesional de Los Ingenieros en MéxicoDaniela PerezОценок пока нет
- Modelo PsicoanaliticoДокумент43 страницыModelo PsicoanaliticoKaterinne Shirley Gutierrez Meza100% (1)
- Tid-1604 Computo en La NubeДокумент7 страницTid-1604 Computo en La Nubeالله ووكر وباللهОценок пока нет
- Subestación Tipo IntemperieДокумент10 страницSubestación Tipo IntemperiedalilaОценок пока нет
- PCA - Grupo de Cultura FisicaДокумент5 страницPCA - Grupo de Cultura Fisicajoice grefa50% (2)
- Mapa MentalДокумент1 страницаMapa MentalLuisa BlancoОценок пока нет
- 3-1.las Claves Del Éxito de FacebookДокумент2 страницы3-1.las Claves Del Éxito de FacebookDavid BОценок пока нет
- CuestionarioДокумент16 страницCuestionarioJose severinoОценок пока нет
- Ficha #07 Identidad NacionalДокумент3 страницыFicha #07 Identidad NacionalArumy Gutierrez VasquezОценок пока нет