Вам также может понравиться
- New Trends in Observer-based Control: A Practical Guide to Process and Engineering ApplicationsОт EverandNew Trends in Observer-based Control: A Practical Guide to Process and Engineering ApplicationsOlfa BoubakerОценок пока нет
- Instrumentation EngineeringДокумент34 страницыInstrumentation Engineeringvaithy1990Оценок пока нет
- Multidimensional Systems: Signal Processing and Modeling Techniques: Advances in Theory and ApplicationsОт EverandMultidimensional Systems: Signal Processing and Modeling Techniques: Advances in Theory and ApplicationsОценок пока нет
- ECE24042010Документ55 страницECE24042010anithabas441Оценок пока нет
- Neural Network Systems Techniques and Applications: Advances in Theory and ApplicationsОт EverandNeural Network Systems Techniques and Applications: Advances in Theory and ApplicationsОценок пока нет
- Ee404 Industrial Instrumentation and AutomationДокумент3 страницыEe404 Industrial Instrumentation and AutomationArya RahulОценок пока нет
- New Trends in Observer-Based Control: An Introduction to Design Approaches and Engineering ApplicationsОт EverandNew Trends in Observer-Based Control: An Introduction to Design Approaches and Engineering ApplicationsOlfa BoubakerОценок пока нет
- Ece 6th SemДокумент18 страницEce 6th SemThirumalai TrendchaserОценок пока нет
- Practical Control of Electric Machines: Model-Based Design and SimulationОт EverandPractical Control of Electric Machines: Model-Based Design and SimulationОценок пока нет
- M.E. Mechatronics SyllabusДокумент38 страницM.E. Mechatronics SyllabusJoswa CaxtonОценок пока нет
- Automatic Instruments and Measuring Systems: Jones' Instrument TechnologyОт EverandAutomatic Instruments and Measuring Systems: Jones' Instrument TechnologyРейтинг: 5 из 5 звезд5/5 (1)
- Anna Univ Syllabus For EIE 3rd To 8th Sem Syllabus - WWW - Annaunivedu.infoДокумент58 страницAnna Univ Syllabus For EIE 3rd To 8th Sem Syllabus - WWW - Annaunivedu.infosudentsideaОценок пока нет
- Instrumentation and Measurement in Electrical EngineeringОт EverandInstrumentation and Measurement in Electrical EngineeringРейтинг: 3.5 из 5 звезд3.5/5 (5)
- Latest PG-Process Control 2008-09Документ32 страницыLatest PG-Process Control 2008-09MAX PAYNEОценок пока нет
- 30 MN423 Instrumentation Measurement and ControlДокумент2 страницы30 MN423 Instrumentation Measurement and ControlLeonidas PerezОценок пока нет
- Power System Frequency Control: Modeling and AdvancesОт EverandPower System Frequency Control: Modeling and AdvancesDillip Kumar MishraОценок пока нет
- MEIДокумент1 страницаMEIsenthilvlОценок пока нет
- Vibration Control and Actuation of Large-Scale SystemsОт EverandVibration Control and Actuation of Large-Scale SystemsHamid Reza KarimiОценок пока нет
- Chhattisgarh Swami Vivekanand Technical University, Bhilai: B.E. Vi Semester Applied Electronics and InstrumentationДокумент18 страницChhattisgarh Swami Vivekanand Technical University, Bhilai: B.E. Vi Semester Applied Electronics and Instrumentationbitandbite20Оценок пока нет
- Control Strategy for Time-Delay Systems: Part II: Engineering ApplicationsОт EverandControl Strategy for Time-Delay Systems: Part II: Engineering ApplicationsMohammad-Hassan KhoobanОценок пока нет
- Mtech Syllabus Eie 2009Документ15 страницMtech Syllabus Eie 2009Raja Prathap SinghОценок пока нет
- Reliability Investigation of LED Devices for Public Light ApplicationsОт EverandReliability Investigation of LED Devices for Public Light ApplicationsОценок пока нет
- Anna University Tirunelveli: Tirunelveli 627 007: Affiliated Institutions Regulations - 2008Документ72 страницыAnna University Tirunelveli: Tirunelveli 627 007: Affiliated Institutions Regulations - 2008nithyaram24Оценок пока нет
- Recent Advances in Chaotic Systems and Synchronization: From Theory to Real World ApplicationsОт EverandRecent Advances in Chaotic Systems and Synchronization: From Theory to Real World ApplicationsOlfa BoubakerОценок пока нет
- PGD in Industrial Automation - Semester-IДокумент8 страницPGD in Industrial Automation - Semester-IReeta DuttaОценок пока нет
- Distributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981От EverandDistributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981Оценок пока нет
- Syl Lab I MechanicalДокумент231 страницаSyl Lab I MechanicalSachin SilmanaОценок пока нет
- Ptbe09 EceДокумент167 страницPtbe09 Eceganathippu1Оценок пока нет
- Lesson PlanДокумент8 страницLesson PlanSheela RaviОценок пока нет
- Puter Integrated Manufacturing SyllabusДокумент41 страницаPuter Integrated Manufacturing SyllabusJoswa CaxtonОценок пока нет
- 4.68 M.E. InstrumentationДокумент41 страница4.68 M.E. InstrumentationBhavesh DigeyОценок пока нет
- EEE - R2013-Elective SyllubuДокумент11 страницEEE - R2013-Elective SyllubuAuse ElОценок пока нет
- Industrial Instrumentation 05EE 62XXДокумент56 страницIndustrial Instrumentation 05EE 62XXwhiteelephant93Оценок пока нет
- App ElecДокумент50 страницApp Elecjayj_5Оценок пока нет
- Inst CNTRLДокумент214 страницInst CNTRLsohaib_86Оценок пока нет
- Process Control Lab ManualДокумент338 страницProcess Control Lab ManualMichael Edwards75% (4)
- Me6504 Metrology and Measurements L T P CДокумент1 страницаMe6504 Metrology and Measurements L T P CajitsssОценок пока нет
- Electronics and Instrumentation Engineering3 - 8Документ133 страницыElectronics and Instrumentation Engineering3 - 8Vinodh GanesanОценок пока нет
- Affiliated Institutions: ITEM NO - FI15.04Документ14 страницAffiliated Institutions: ITEM NO - FI15.04chsau100% (1)
- Industrial Electronics Optical Instrumentation Cdma MBSD Process Control Lab ProjectДокумент8 страницIndustrial Electronics Optical Instrumentation Cdma MBSD Process Control Lab ProjectKarthik NairОценок пока нет
- Communication and Networking SyllabusДокумент41 страницаCommunication and Networking SyllabusWesley Moses SamdossОценок пока нет
- 57 M.tech. Chemical EnggДокумент13 страниц57 M.tech. Chemical EnggDrSivaraja Subramania PillaiОценок пока нет
- Syllabus UTU EE 8th Sem 2009-10Документ12 страницSyllabus UTU EE 8th Sem 2009-10Atul KumarОценок пока нет
- Measurements and InstrumentationДокумент3 страницыMeasurements and Instrumentationsreenivas43100% (1)
- Dynamic Modelling of Gas Turbines Identification Simulation Condition Monitoring and Optimal ControlДокумент328 страницDynamic Modelling of Gas Turbines Identification Simulation Condition Monitoring and Optimal ControlAnonymous rsGzBBiqk100% (1)
- Anna University of Technology, Coimbatore B.E - (Electronics and Communication Engineering) Semester V Code No-Course Title L T P M C TheoryДокумент14 страницAnna University of Technology, Coimbatore B.E - (Electronics and Communication Engineering) Semester V Code No-Course Title L T P M C TheoryragulsukumarОценок пока нет
- B. Tech. Final Year InstruДокумент32 страницыB. Tech. Final Year InstruRoman RoomannОценок пока нет
- Liu 2001Документ224 страницыLiu 2001Laura Maria RodriguezОценок пока нет
- M.E Control and Instrumentation Engineering PDFДокумент55 страницM.E Control and Instrumentation Engineering PDFAmit SaurabhОценок пока нет
- ECE Syllabus Anna University (CEG, MIT)Документ86 страницECE Syllabus Anna University (CEG, MIT)Pon Krithikha100% (1)
- Eee.60-62Документ3 страницыEee.60-62skrtamilОценок пока нет
- ME Avionics SyllabusДокумент42 страницыME Avionics SyllabusSam ThomasОценок пока нет
- Software For Embedded SystemДокумент39 страницSoftware For Embedded Systemjani28cseОценок пока нет
- Energy. Syllabus 2009 - Sem 2Документ31 страницаEnergy. Syllabus 2009 - Sem 2Suseel Jai KrishnanОценок пока нет
- (George A. Rovithakis Manolis A. Christodoulou) Adaptive Control With Recurrent High Order Neural NetworksДокумент202 страницы(George A. Rovithakis Manolis A. Christodoulou) Adaptive Control With Recurrent High Order Neural Networksruben210979Оценок пока нет
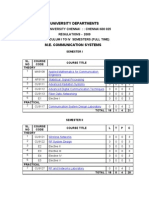
- University Departments: Anna University Chennai:: Chennai 600 025Документ42 страницыUniversity Departments: Anna University Chennai:: Chennai 600 025Jeyaram KumarОценок пока нет
- MetrologyДокумент3 страницыMetrologySachi DhanandamОценок пока нет
- University DepartmentsДокумент33 страницыUniversity DepartmentsPn KrizhhОценок пока нет
- Instrumentation EngineeringДокумент126 страницInstrumentation EngineeringGaurav UpaОценок пока нет
- The Best Amiga Tricks and TipsДокумент438 страницThe Best Amiga Tricks and TipsJohnLandisОценок пока нет
- KSW-230 (Water Flow Switch)Документ2 страницыKSW-230 (Water Flow Switch)Anonymous XYAPaxjbYОценок пока нет
- ClimateMaster Troubleshooting Info Revised 10-04-11Документ5 страницClimateMaster Troubleshooting Info Revised 10-04-11Daniel VeraОценок пока нет
- Examples of MPIДокумент3 страницыExamples of MPIzaw lin ooОценок пока нет
- Zeeman EffectДокумент5 страницZeeman Effectjsebas635Оценок пока нет
- s71200 Easy Book en-US en-USДокумент364 страницыs71200 Easy Book en-US en-USReynanBorliniОценок пока нет
- Datasheet PDFДокумент10 страницDatasheet PDFRi Cha RdОценок пока нет
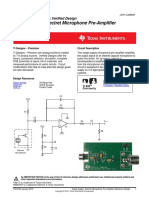
- Transimpedance Amplifier With Mic PDFДокумент23 страницыTransimpedance Amplifier With Mic PDFChanderKishoreJoshiОценок пока нет
- Review of Modern Field Effect Transistor Technologie1Документ8 страницReview of Modern Field Effect Transistor Technologie1G ManОценок пока нет
- KEI Cables-1Документ72 страницыKEI Cables-1chandu1821Оценок пока нет
- A 0-55-GHz Coplanar Waveguide PDFДокумент6 страницA 0-55-GHz Coplanar Waveguide PDFmujeeb.abdullah2830Оценок пока нет
- Technology: ControlsДокумент32 страницыTechnology: ControlsAli Hossain AdnanОценок пока нет
- A - ATG - PR 2014 0006 GB - HyPower Geko OCT - BR - K1 02 2015 - 150dpi PDFДокумент16 страницA - ATG - PR 2014 0006 GB - HyPower Geko OCT - BR - K1 02 2015 - 150dpi PDFionutenacheОценок пока нет
- Selectivity Catalog Domestic 291015Документ12 страницSelectivity Catalog Domestic 291015Samarendu BaulОценок пока нет
- User's Guide: Smartpack2 Basic ControllerДокумент16 страницUser's Guide: Smartpack2 Basic ControllerIsac ClaroОценок пока нет
- Prac. Summer 2014Документ19 страницPrac. Summer 2014Praful KakdeОценок пока нет
- Final Day PresentationДокумент43 страницыFinal Day Presentationswanichatterjee0Оценок пока нет
- 11Документ25 страниц11Suraj KumarОценок пока нет
- Shenzhen Noridc - BLE Sensor AppДокумент54 страницыShenzhen Noridc - BLE Sensor AppAlina AnaОценок пока нет
- Bengkel Teknik Menjawab SPM 2016 PDFДокумент59 страницBengkel Teknik Menjawab SPM 2016 PDFSuriyati Yusoff75% (4)
- Tips For Chemistry SPMДокумент4 страницыTips For Chemistry SPMLim Kai Yee100% (1)
- Air Brake CourseДокумент215 страницAir Brake Courserizaazari4530100% (3)
- Man 41151 en 06 PDFДокумент56 страницMan 41151 en 06 PDFPanneer Selvam100% (1)
- Mcd388 98 Pss AenДокумент3 страницыMcd388 98 Pss AenmallipudyОценок пока нет
- DSR Electrical 2012Документ60 страницDSR Electrical 2012vijay_raina31140% (1)
- 2 Guide SSHV2Документ3 страницы2 Guide SSHV2Calsonic CMGОценок пока нет
- Fault Finding GuideДокумент3 страницыFault Finding Guiderajesh_patil982002Оценок пока нет
- Oppo Ecno Buds 2Документ2 страницыOppo Ecno Buds 2patelsingh638Оценок пока нет
- HEDS5500 EncoderДокумент15 страницHEDS5500 Encodermaxdan111Оценок пока нет
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsОт EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsРейтинг: 5 из 5 звезд5/5 (1)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxОт EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxРейтинг: 4.5 из 5 звезд4.5/5 (67)
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringОт EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringРейтинг: 5 из 5 звезд5/5 (40)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityОт EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityРейтинг: 5 из 5 звезд5/5 (2)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamОт EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamОценок пока нет
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionОт EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionРейтинг: 5 из 5 звезд5/5 (4)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsОт EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsОценок пока нет
- Azure Networking: Command Line Mastery From Beginner To ArchitectОт EverandAzure Networking: Command Line Mastery From Beginner To ArchitectОценок пока нет
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationОт EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationРейтинг: 5 из 5 звезд5/5 (2)
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsОт EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsОценок пока нет
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationОт EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationОценок пока нет
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNОт EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNРейтинг: 5 из 5 звезд5/5 (1)
- Terraform for Developers: Essentials of Infrastructure Automation and ProvisioningОт EverandTerraform for Developers: Essentials of Infrastructure Automation and ProvisioningОценок пока нет
- Open Radio Access Network (O-RAN) Systems Architecture and DesignОт EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignОценок пока нет
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamОт EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamРейтинг: 5 из 5 звезд5/5 (1)
- ITIL 4 : Drive Stakeholder Value: Reference and study guideОт EverandITIL 4 : Drive Stakeholder Value: Reference and study guideОценок пока нет