Вам также может понравиться
- Basic Structured Grid Generation: With an introduction to unstructured grid generationОт EverandBasic Structured Grid Generation: With an introduction to unstructured grid generationОценок пока нет
- Mesh Motion Alternatives in OpenFOAMДокумент31 страницаMesh Motion Alternatives in OpenFOAMbinho58Оценок пока нет
- 3.1 The Different Classes Used in MovedynamicmeshДокумент1 страница3.1 The Different Classes Used in Movedynamicmeshfixer86Оценок пока нет
- Parallelization and Load Balancing of A Dynamic Mesh Method For Moving Boundary CFDДокумент15 страницParallelization and Load Balancing of A Dynamic Mesh Method For Moving Boundary CFDdidaОценок пока нет
- Moving Mesh Strategies in OpenFOAMДокумент14 страницMoving Mesh Strategies in OpenFOAMulissesalves2004Оценок пока нет
- Cap 5Документ78 страницCap 5Isaaias CTОценок пока нет
- Modena2006 LucchDerrOKДокумент10 страницModena2006 LucchDerrOKAghajaniОценок пока нет
- 3 Theoretical Background: The Basics of MovedynamicmeshДокумент1 страница3 Theoretical Background: The Basics of Movedynamicmeshfixer86Оценок пока нет
- CFD Theory and Models ChapterДокумент12 страницCFD Theory and Models ChapterGabriel NogueiraОценок пока нет
- Inputs for Boundary Mesh GenerationДокумент4 страницыInputs for Boundary Mesh GenerationThe Rural manОценок пока нет
- Assignment 2 Part 1 / Object Oriented Systems Design - Design Patterns and Evolution of Software-ArchitecturesДокумент10 страницAssignment 2 Part 1 / Object Oriented Systems Design - Design Patterns and Evolution of Software-ArchitecturesRonald CordovaОценок пока нет
- Classifying Compliant Mechanisms Using FBS Ontology and Degrees of FreedomДокумент12 страницClassifying Compliant Mechanisms Using FBS Ontology and Degrees of Freedomomer elaminОценок пока нет
- Chebbi_16559Документ28 страницChebbi_16559acarrascotaberaОценок пока нет
- Robotics: Dynamic Modeling of Planar Multi-Link Flexible ManipulatorsДокумент26 страницRobotics: Dynamic Modeling of Planar Multi-Link Flexible ManipulatorsJackОценок пока нет
- Cfmesh - Short IntroductionДокумент7 страницCfmesh - Short Introductiongego477Оценок пока нет
- On Dynamic MeshДокумент2 страницыOn Dynamic MeshSukhamMichaelОценок пока нет
- Fluids For Games 2-10 PDFДокумент15 страницFluids For Games 2-10 PDFJhonny NascimentoОценок пока нет
- 8_FrancoisДокумент10 страниц8_FrancoisfredyОценок пока нет
- Semantic Translation of Simulink/Stateflow Models To Hybrid Automata Using Graph TransformationsДокумент13 страницSemantic Translation of Simulink/Stateflow Models To Hybrid Automata Using Graph TransformationsPoepaye Pox OlifОценок пока нет
- Til2021 Proceedings 15Документ6 страницTil2021 Proceedings 15Alma ŽigaОценок пока нет
- 02 Hanging Nodes and XFEMДокумент33 страницы02 Hanging Nodes and XFEMHaiОценок пока нет
- (1995 Q2 WOS) An Algorithm To Generate Quadrilateral or Triangular Element Surface Meshes in Arbitrary Domains With Applications To Crack PropagationДокумент25 страниц(1995 Q2 WOS) An Algorithm To Generate Quadrilateral or Triangular Element Surface Meshes in Arbitrary Domains With Applications To Crack PropagationSyahiir KamilОценок пока нет
- ClosechainДокумент15 страницClosechainQuyết Nguyễn CôngОценок пока нет
- Report Magnus UrquhartДокумент23 страницыReport Magnus UrquhartAnonymous RcmKrtnlОценок пока нет
- Analysis and Measurements - 036-114Документ79 страницAnalysis and Measurements - 036-114김동은Оценок пока нет
- Modeling of Compressible Fluid Problems With Openfoam Using Dynamic Mesh TechnologyДокумент17 страницModeling of Compressible Fluid Problems With Openfoam Using Dynamic Mesh TechnologyluisОценок пока нет
- Zalesak FCT AlgorithmsДокумент44 страницыZalesak FCT Algorithmsprash_neoОценок пока нет
- Interview DVДокумент5 страницInterview DVPrasad Reddy100% (1)
- Wolf and LamДокумент38 страницWolf and LamAjayBrahmakshatriyaОценок пока нет
- (348490223) FEA-NotesДокумент22 страницы(348490223) FEA-Notesonezero111100% (1)
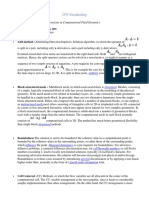
- CFD VocabularyДокумент10 страницCFD VocabularyAmir LachrafОценок пока нет
- Chapter 8 Practical Introduction To Rigid Body Linear Complementary Problem (LCP) Constraint SolversДокумент43 страницыChapter 8 Practical Introduction To Rigid Body Linear Complementary Problem (LCP) Constraint SolversjohnsmithiОценок пока нет
- Coupled Motion of Two Floating ObjectsДокумент30 страницCoupled Motion of Two Floating ObjectsFeng ZhaoОценок пока нет
- Open FoamДокумент9 страницOpen FoamRahul ShuklaОценок пока нет
- Synthesis of Planar Mechanisms 5.1. Synthesis of MechanismsДокумент5 страницSynthesis of Planar Mechanisms 5.1. Synthesis of MechanismsHARI KRISHNAN GОценок пока нет
- Hidden Markov Model - Wikipedia, The Free EncyclopediaДокумент11 страницHidden Markov Model - Wikipedia, The Free EncyclopediasiinemОценок пока нет
- CF MeshДокумент30 страницCF MeshUtkun Erinc MalkocogluОценок пока нет
- TMMV08 A1 2024Документ9 страницTMMV08 A1 2024adityaОценок пока нет
- A Shifted Block Lanczos Algorithm For Solving Sparse Symmetric Generalized EigenproblemsДокумент45 страницA Shifted Block Lanczos Algorithm For Solving Sparse Symmetric Generalized EigenproblemsFrancesco BОценок пока нет
- Introduction To Finite Element Analysis in Solid Mechanics: Home Quick Navigation Problems FEA CodesДокумент25 страницIntroduction To Finite Element Analysis in Solid Mechanics: Home Quick Navigation Problems FEA CodespalgunahgОценок пока нет
- Sa Ii TheoryДокумент11 страницSa Ii TheoryNothing SpecialОценок пока нет
- Tutorial MultiphaseInterFoamДокумент21 страницаTutorial MultiphaseInterFoamAnonymous 9pln4v92SОценок пока нет
- MEDLala 08Документ8 страницMEDLala 08Fatiha HAMDIОценок пока нет
- Numerical Methods for Turbulent FlowsДокумент61 страницаNumerical Methods for Turbulent FlowsZen KyoОценок пока нет
- Advanced Character Physics: Thomas JakobsenДокумент19 страницAdvanced Character Physics: Thomas JakobsenalphasigmadeltaОценок пока нет
- Dynamics of multibody systems using discrete time transfer matrix methodДокумент29 страницDynamics of multibody systems using discrete time transfer matrix methodsumathyОценок пока нет
- Optimal Design of Barrel Vaults Using Charged Search SystemДокумент8 страницOptimal Design of Barrel Vaults Using Charged Search Systemgirish_deshmukh100% (1)
- Review Pde RBFДокумент15 страницReview Pde RBFCristhian Paúl Neyra SalvadorОценок пока нет
- 2007 06 IFToMM DynamicsДокумент6 страниц2007 06 IFToMM DynamicsChernet TugeОценок пока нет
- Constrained Mean-Variance Mapping Optimization For Truss Optimization ProblemsДокумент17 страницConstrained Mean-Variance Mapping Optimization For Truss Optimization ProblemsVenkatesh VarmaОценок пока нет
- Frames, Bases and Group RepresentationsДокумент110 страницFrames, Bases and Group RepresentationsJung Hyun KimОценок пока нет
- Manual FLAC PDFДокумент280 страницManual FLAC PDFFreddy RoblesОценок пока нет
- Control and Control Theory For Flexible RobotsДокумент8 страницControl and Control Theory For Flexible RobotsGIYEONGОценок пока нет
- Dynamic Analysis With MATLAB and ANSYSДокумент31 страницаDynamic Analysis With MATLAB and ANSYSMiguel Angel SánchezОценок пока нет
- Vibrations Unit Iv QBДокумент13 страницVibrations Unit Iv QBTonnie TheoОценок пока нет
- Finite Element Method in Structural MechanicsДокумент5 страницFinite Element Method in Structural MechanicsPaolo GoducoОценок пока нет
- Interpolation and Extrapolation Optimal Designs 2: Finite Dimensional General ModelsОт EverandInterpolation and Extrapolation Optimal Designs 2: Finite Dimensional General ModelsОценок пока нет
- Mbs Public School: Topic: Study The Presence of Oxalate Ions in Guava Fruit at Different Stages of RipeningДокумент15 страницMbs Public School: Topic: Study The Presence of Oxalate Ions in Guava Fruit at Different Stages of RipeningSwaraj Patel100% (1)
- Truth Without ObjectivityДокумент4 страницыTruth Without ObjectivityMetafisco Parapensante0% (1)
- Planetary AlignmentДокумент7 страницPlanetary AlignmentEbn MisrОценок пока нет
- Welding Machine CatalogueДокумент12 страницWelding Machine CatalogueRodney LanagОценок пока нет
- Podar International School Chinchwad STD Xi - (I Unit Test) Subject: Computer Science Date: 8-9-2020 Marks: 40Документ3 страницыPodar International School Chinchwad STD Xi - (I Unit Test) Subject: Computer Science Date: 8-9-2020 Marks: 40Shriniwas KulkarniОценок пока нет
- 124C1AДокумент4 страницы124C1AParthiban DevendiranОценок пока нет
- Matrix Inversion Note in Mathematics MagazineДокумент2 страницыMatrix Inversion Note in Mathematics Magazinejuan carlos molano toroОценок пока нет
- Fault Report - Inventory Cpf1 Vs Caño LimomДокумент37 страницFault Report - Inventory Cpf1 Vs Caño LimomJessica RiveraОценок пока нет
- Fix Disk & Partition ErrorsДокумент2 страницыFix Disk & Partition Errorsdownload181Оценок пока нет
- Kidney AnatomyДокумент55 страницKidney AnatomyMohammad zreadОценок пока нет
- Coordinated Interference Management (Low-Frequency TDD) (5G RAN6.1 - Draft A)Документ28 страницCoordinated Interference Management (Low-Frequency TDD) (5G RAN6.1 - Draft A)VVLОценок пока нет
- Z 80 HelptopicsДокумент5 страницZ 80 HelptopicsEverly NОценок пока нет
- SPCU3C14Документ20 страницSPCU3C14ming tsaoОценок пока нет
- IMME19 Schedule PDFДокумент39 страницIMME19 Schedule PDFVikram JainОценок пока нет
- MCB and ELCB PDFДокумент35 страницMCB and ELCB PDFChris AntoniouОценок пока нет
- Wi Cswip 3.1 Part 13Документ7 страницWi Cswip 3.1 Part 13Ramakrishnan AmbiSubbiahОценок пока нет
- WCS1400 / WCS1400S: FeaturesДокумент7 страницWCS1400 / WCS1400S: FeaturesbahrowiadiОценок пока нет
- Biology Notes HSCДокумент107 страницBiology Notes HSCGouri DasОценок пока нет
- POWER GENERATION FROM OCEAN WAVESДокумент14 страницPOWER GENERATION FROM OCEAN WAVESChersey DoctorОценок пока нет
- XI-Opt. Syllabus (2023-24)Документ29 страницXI-Opt. Syllabus (2023-24)INDERDEEPОценок пока нет
- Forrester Roi StudyДокумент30 страницForrester Roi StudymcgettsОценок пока нет
- Si™ Command Language (SCL) Software Manual: For 1240I 3540I 7080I Bl7080I Blsi7080 Si-100 Si2035 Si3540 Si5580Документ23 страницыSi™ Command Language (SCL) Software Manual: For 1240I 3540I 7080I Bl7080I Blsi7080 Si-100 Si2035 Si3540 Si5580Agenor CarvalhoОценок пока нет
- KX DT543Документ74 страницыKX DT543Uriel Obregon BalbinОценок пока нет
- Applications and Interpretation Standard SpecimensДокумент56 страницApplications and Interpretation Standard SpecimensNahir ClaraОценок пока нет
- Alkali Boil Out ProcedureДокумент7 страницAlkali Boil Out Procedureismail karmanaОценок пока нет
- Clone Steps RmanДокумент10 страницClone Steps RmanKishore AdikarОценок пока нет
- Using Topcon GR-3 GPS for Topographic SurveysДокумент4 страницыUsing Topcon GR-3 GPS for Topographic SurveysFranco BaldiОценок пока нет
- Unit 6 - Quantitative Analysis NotesДокумент53 страницыUnit 6 - Quantitative Analysis Notesapi-182809945Оценок пока нет
- p-4500 Technical InformationДокумент13 страницp-4500 Technical InformationElhoiОценок пока нет
- ASME - Performance Test CodesДокумент1 страницаASME - Performance Test CodesanoopkntpcОценок пока нет