Вам также может понравиться
- Learning Adjectives and Nouns From Affordances On The Icub Humanoid RobotДокумент11 страницLearning Adjectives and Nouns From Affordances On The Icub Humanoid RobotkfuScribdОценок пока нет
- A Study On Rapidly-Growing Random TreesДокумент3 страницыA Study On Rapidly-Growing Random TreeskfuScribdОценок пока нет
- RoboTurk Team DescriptionДокумент12 страницRoboTurk Team DescriptionkfuScribdОценок пока нет
- A Study On Tangent Bug AlgorithmДокумент3 страницыA Study On Tangent Bug AlgorithmkfuScribdОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Propeller DesignДокумент1 страницаPropeller DesignKeerthana MaheswarlaОценок пока нет
- Trial Manufacture of A Fluid-Type Static Induction TransistorДокумент4 страницыTrial Manufacture of A Fluid-Type Static Induction TransistorStanley ClermontОценок пока нет
- Delhi Public School Bangalore North ACADEMIC SESSION 2021-2022 Ut2 Revision Work Sheet TOPIC: Sorting Materials Into Group Answer KeyДокумент6 страницDelhi Public School Bangalore North ACADEMIC SESSION 2021-2022 Ut2 Revision Work Sheet TOPIC: Sorting Materials Into Group Answer KeySumukh MullangiОценок пока нет
- Preview ISO+749-1977 PDFДокумент3 страницыPreview ISO+749-1977 PDFLiana GaniОценок пока нет
- Build-A-Bard ABB - RFQ-807683Reaprovechamiento Relaves - SR For Cotejado 010A - HVACДокумент18 страницBuild-A-Bard ABB - RFQ-807683Reaprovechamiento Relaves - SR For Cotejado 010A - HVACchristianОценок пока нет
- EM230 BR BM3 Fitting InstructionsДокумент2 страницыEM230 BR BM3 Fitting InstructionsRoman BabaevОценок пока нет
- Material Safety Data Sheet: Roduct Ompany DentificationДокумент6 страницMaterial Safety Data Sheet: Roduct Ompany DentificationArgade GVОценок пока нет
- Help - Translating A CAD Stewart Platform - Computer-Aided Design Translation (SimMechanics™ Link)Документ8 страницHelp - Translating A CAD Stewart Platform - Computer-Aided Design Translation (SimMechanics™ Link)ĐinhĐứcAnhОценок пока нет
- Woson 23 Litre B Class Touch AutoclaveДокумент2 страницыWoson 23 Litre B Class Touch AutoclaveBashar MohammadОценок пока нет
- Slope Stability in Slightly Fissured Claystones and MarlsДокумент25 страницSlope Stability in Slightly Fissured Claystones and MarlsrullyirwandiОценок пока нет
- 03-1 Synchronous Machines 1 DNДокумент25 страниц03-1 Synchronous Machines 1 DNsaif thuraonОценок пока нет
- AB-522 Standard Pneumatic Test Procedure RequirementsДокумент16 страницAB-522 Standard Pneumatic Test Procedure RequirementsShank HackerОценок пока нет
- Behringer UB2222FX PROДокумент5 страницBehringer UB2222FX PROmtlcaqc97 mtlcaqc97Оценок пока нет
- Fast, Accurate Data Management Across The Enterprise: Fact Sheet: File-Aid / MvsДокумент4 страницыFast, Accurate Data Management Across The Enterprise: Fact Sheet: File-Aid / MvsLuis RamirezОценок пока нет
- 007-013558-001 SAS PCE SPE With Support For HSM PSE2 Integration Feature Documentation RevCДокумент43 страницы007-013558-001 SAS PCE SPE With Support For HSM PSE2 Integration Feature Documentation RevCpietoeОценок пока нет
- Genius Publication CatalogueДокумент16 страницGenius Publication CatalogueRaheel KhanОценок пока нет
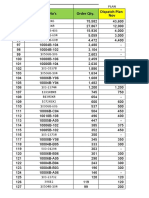
- Order Qty Vs Dispatch Plan - 04 11 20Документ13 страницOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPОценок пока нет
- Transmisor HarrisДокумент195 страницTransmisor HarrisJose Juan Gutierrez Sanchez100% (1)
- 701.ssvseat 1.04Документ2 страницы701.ssvseat 1.04Cosmin MuscaluОценок пока нет
- Dynamic Cone Penetrometers: In-Situ CBR in 10 Minutes With Dual-Mass DcpsДокумент2 страницыDynamic Cone Penetrometers: In-Situ CBR in 10 Minutes With Dual-Mass Dcpsd'Hell CaesarОценок пока нет
- PBLauncherДокумент50 страницPBLauncherborreveroОценок пока нет
- Q3 NSP - SLP - RLPДокумент41 страницаQ3 NSP - SLP - RLPRushi RavalОценок пока нет
- Teradata Installation: Installation Steps For WindowsДокумент4 страницыTeradata Installation: Installation Steps For WindowsjupudiguptaОценок пока нет
- Curriculum Vitae: Augusto Javier Puican ZarpanДокумент4 страницыCurriculum Vitae: Augusto Javier Puican Zarpanfrank_d_1Оценок пока нет
- Justine J. Beroy: Career ObjectivesДокумент5 страницJustine J. Beroy: Career ObjectivesJustine BeroyОценок пока нет
- Bio-Sensors and Bio-Devices: Spring 2020Документ22 страницыBio-Sensors and Bio-Devices: Spring 2020barristertoto99 chanОценок пока нет
- Makita 2708Документ29 страницMakita 2708Reuel JacintoОценок пока нет
- RT L2 General Examination PaperДокумент4 страницыRT L2 General Examination PaperdaddadОценок пока нет
- Method StatementДокумент4 страницыMethod StatementtayitbatovОценок пока нет