Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Caspah - Kamunda 1593513704 AДокумент42 страницыCaspah - Kamunda 1593513704 Ajoseph wamulumeОценок пока нет
- Solved Problems, Fundamentals of Fluid FlowДокумент40 страницSolved Problems, Fundamentals of Fluid Flowgertjani57% (7)
- Chapter 2 NPTEL Wave PropagationДокумент32 страницыChapter 2 NPTEL Wave PropagationHari RamОценок пока нет
- 1920 F4 Physics Final ExamДокумент23 страницы1920 F4 Physics Final ExamEvelyn ChongОценок пока нет
- Serway Physics II Example Questions Chapter 7Документ1 страницаSerway Physics II Example Questions Chapter 7AizuddinОценок пока нет
- Unit 5 Vibration Absorbers - TutДокумент13 страницUnit 5 Vibration Absorbers - TutShivam Gupta100% (1)
- Basic Characteristics of SoundДокумент29 страницBasic Characteristics of SoundAndy MohlerОценок пока нет
- Rocket Thrust Example ProblemsДокумент33 страницыRocket Thrust Example ProblemsErnesto D. AguirreОценок пока нет
- Speed, Time & Distance - BBX-888062647Документ15 страницSpeed, Time & Distance - BBX-888062647Rudrank ShuklaОценок пока нет
- 04 BS 3Документ9 страниц04 BS 3Hashem EL-MaRimeyОценок пока нет
- Free Fall - Austria, Joyce Nicole L.Документ21 страницаFree Fall - Austria, Joyce Nicole L.Joyce AustriaОценок пока нет
- Re-Design The Wing of The C-212-400 PDFДокумент6 страницRe-Design The Wing of The C-212-400 PDFMaurizio BernasconiОценок пока нет
- Degree of ReactionДокумент24 страницыDegree of ReactionKrishna SinghОценок пока нет
- WindtunnelДокумент3 страницыWindtunnelVINOTHKUMAR SAMPATHОценок пока нет
- e = N (dΦ/dt) x 10: Generation of Alternating Electromotive ForceДокумент8 страницe = N (dΦ/dt) x 10: Generation of Alternating Electromotive ForceReniel MendozaОценок пока нет
- Lecture 23 Oblique Incidence and ReflectionДокумент21 страницаLecture 23 Oblique Incidence and Reflectionvaldesc_tolОценок пока нет
- GP 110: Engineering Mechanics Particle Dynamics: Problem Sheet 1Документ2 страницыGP 110: Engineering Mechanics Particle Dynamics: Problem Sheet 1Crypto FaucetОценок пока нет
- Unit WTДокумент9 страницUnit WTpraneetsadekarОценок пока нет
- Exps 11Документ3 страницыExps 11Roger100% (1)
- Powertrain Mounting Design Principles To Achieve Optimum Vibration Isolation With Demonstration ToolsДокумент8 страницPowertrain Mounting Design Principles To Achieve Optimum Vibration Isolation With Demonstration ToolsAnonymous b8hxRVx100% (1)
- Lift Pulley PresentationДокумент9 страницLift Pulley PresentationNg JunqiОценок пока нет
- Lab 126 Darshan PatelДокумент7 страницLab 126 Darshan PatelDarshan Patel0% (2)
- Serway PSE Quick ch40Документ19 страницSerway PSE Quick ch40Yeni Alexandra Rodriguez BaronОценок пока нет
- Science 8 - Module 2 3 - Earthquakes - Seismic WavesДокумент23 страницыScience 8 - Module 2 3 - Earthquakes - Seismic Wavesredox francisco100% (1)
- Assignment 1: Introduction To Music Production: Mrityunjay AwasthyДокумент6 страницAssignment 1: Introduction To Music Production: Mrityunjay AwasthymrityunjayawasthyОценок пока нет
- PETE 311 Lab 7 MemoДокумент4 страницыPETE 311 Lab 7 MemoTyler MroskoОценок пока нет
- 4c Work Energy MC Practice Problems ANSWERSДокумент6 страниц4c Work Energy MC Practice Problems ANSWERSAnna XieОценок пока нет
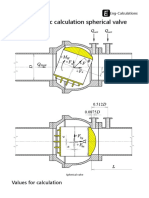
- Hydrodynamic Calculation Spherical ValveДокумент34 страницыHydrodynamic Calculation Spherical ValveEng-CalculationsОценок пока нет
- Bouncing Balls 1 Bouncing Balls 2: - "Lively" Balls Lose Little Energy. - "Dead" Balls Lose Much EnergyДокумент3 страницыBouncing Balls 1 Bouncing Balls 2: - "Lively" Balls Lose Little Energy. - "Dead" Balls Lose Much EnergyWati KaОценок пока нет
- Seismology and Earthquake Engineering PaperДокумент2 страницыSeismology and Earthquake Engineering PaperGaurav ThakurОценок пока нет