Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Fire Art Case StudyДокумент15 страницFire Art Case StudyKimberlyHerring100% (1)
- Final Report - Solving Traveling Salesman Problem by Dynamic Programming Approach in Java Program Aditya Nugroho Ht083276eДокумент15 страницFinal Report - Solving Traveling Salesman Problem by Dynamic Programming Approach in Java Program Aditya Nugroho Ht083276eAytida Ohorgun100% (5)
- NASA 122211main M-567 TKC JNLДокумент1 страницаNASA 122211main M-567 TKC JNLNASAdocumentsОценок пока нет
- NASA: 178801main Goals ObjectivesДокумент12 страницNASA: 178801main Goals ObjectivesNASAdocuments100% (2)
- NASA 168207main ExecutiveSummaryBrochureДокумент2 страницыNASA 168207main ExecutiveSummaryBrochureNASAdocumentsОценок пока нет
- NASA: 190101main Plum Brook MapДокумент1 страницаNASA: 190101main Plum Brook MapNASAdocuments100% (2)
- NASA 149000main Nasa 2005 ReportДокумент66 страницNASA 149000main Nasa 2005 ReportNASAdocumentsОценок пока нет
- NASA 168206main CenterResumeДокумент67 страницNASA 168206main CenterResumeNASAdocumentsОценок пока нет
- NASA 122211main M-567 TKC JNLДокумент1 страницаNASA 122211main M-567 TKC JNLNASAdocumentsОценок пока нет
- NASA 151450main FNL8-40738Документ2 страницыNASA 151450main FNL8-40738NASAdocumentsОценок пока нет
- NASA 168206main CenterResumeДокумент67 страницNASA 168206main CenterResumeNASAdocumentsОценок пока нет
- NASA 149000main Nasa 2005 ReportДокумент66 страницNASA 149000main Nasa 2005 ReportNASAdocumentsОценок пока нет
- NASA 171651main fs-2007-02-00041-sscДокумент2 страницыNASA 171651main fs-2007-02-00041-sscNASAdocumentsОценок пока нет
- NASA: 190101main Plum Brook MapДокумент1 страницаNASA: 190101main Plum Brook MapNASAdocuments100% (2)
- NASA 168207main ExecutiveSummaryBrochureДокумент2 страницыNASA 168207main ExecutiveSummaryBrochureNASAdocumentsОценок пока нет
- NASA: 55583main Vision Space Exploration2Документ32 страницыNASA: 55583main Vision Space Exploration2NASAdocuments100% (5)
- NASA: 67453main Elv2003Документ10 страницNASA: 67453main Elv2003NASAdocumentsОценок пока нет
- Language Assistance Plan (LAP) Accommodating Persons With Limited English Proficiency in NASA/KSC-Conducted Programs and ActivitiesДокумент11 страницLanguage Assistance Plan (LAP) Accommodating Persons With Limited English Proficiency in NASA/KSC-Conducted Programs and ActivitiesNASAdocumentsОценок пока нет
- NASA 166985main FS-2006-10-124-LaRCДокумент35 страницNASA 166985main FS-2006-10-124-LaRCNASAdocumentsОценок пока нет
- NASA: 55583main Vision Space Exploration2Документ32 страницыNASA: 55583main Vision Space Exploration2NASAdocuments100% (5)
- NASA: 55583main Vision Space Exploration2Документ32 страницыNASA: 55583main Vision Space Exploration2NASAdocuments100% (5)
- NASA 174803main MSFC Prime ContractorsДокумент10 страницNASA 174803main MSFC Prime ContractorsNASAdocumentsОценок пока нет
- NASA: 188227main fs-2007-08-00046-sscДокумент2 страницыNASA: 188227main fs-2007-08-00046-sscNASAdocumentsОценок пока нет
- NASA: 68481main LAP-RevAДокумент20 страницNASA: 68481main LAP-RevANASAdocumentsОценок пока нет
- NASA 167686main FY 2006 NASA PARpt3 508Документ85 страницNASA 167686main FY 2006 NASA PARpt3 508NASAdocumentsОценок пока нет
- NASA 159998main MSFC Fact SheetДокумент4 страницыNASA 159998main MSFC Fact SheetNASAdocumentsОценок пока нет
- NASA: 68198main AreaAttractions2003Документ8 страницNASA: 68198main AreaAttractions2003NASAdocumentsОценок пока нет
- CIP Program Report 1992Документ180 страницCIP Program Report 1992cip-libraryОценок пока нет
- Customizable Feature Based Design Pattern Recognition Integrating Multiple TechniquesДокумент191 страницаCustomizable Feature Based Design Pattern Recognition Integrating Multiple TechniquesCalina Sechel100% (1)
- ACCA Advanced Corporate Reporting 2005Документ763 страницыACCA Advanced Corporate Reporting 2005Platonic100% (2)
- RR 10-76Документ4 страницыRR 10-76cheska_abigail950Оценок пока нет
- Jyotish - 2003 Sri Jagannath Center - Narayan Iyer - Divisional Charts - Divining Through DivisionsДокумент36 страницJyotish - 2003 Sri Jagannath Center - Narayan Iyer - Divisional Charts - Divining Through DivisionsDeepa MishraОценок пока нет
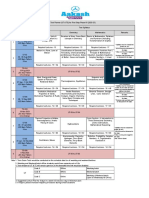
- UT & TE Planner - AY 2023-24 - Phase-01Документ1 страницаUT & TE Planner - AY 2023-24 - Phase-01Atharv KumarОценок пока нет
- Oxford Reading Circle tg-4 2nd EditionДокумент92 страницыOxford Reading Circle tg-4 2nd EditionAreeb Siddiqui89% (9)
- On Wallace Stevens - by Marianne Moore - The New York Review of BooksДокумент2 страницыOn Wallace Stevens - by Marianne Moore - The New York Review of BooksTuvshinzaya GantulgaОценок пока нет
- The Hawthorne Studies RevisitedДокумент25 страницThe Hawthorne Studies Revisitedsuhana satijaОценок пока нет
- List de VerbosДокумент2 страницыList de VerbosmarcoОценок пока нет
- A Quality Improvement Initiative To Engage Older Adults in The DiДокумент128 страницA Quality Improvement Initiative To Engage Older Adults in The Disara mohamedОценок пока нет
- ''Want To Learn To Speak Latin or Greek This (2018) Summer''Документ10 страниц''Want To Learn To Speak Latin or Greek This (2018) Summer''ThriwОценок пока нет
- Accounting 110: Acc110Документ19 страницAccounting 110: Acc110ahoffm05100% (1)
- SHS11Q4DLP 21st CentFinalДокумент33 страницыSHS11Q4DLP 21st CentFinalNOEMI DE CASTROОценок пока нет
- Blunders and How To Avoid Them Dunnington PDFДокумент147 страницBlunders and How To Avoid Them Dunnington PDFrajveer404100% (2)
- Chhabra, D., Healy, R., & Sills, E. (2003) - Staged Authenticity and Heritage Tourism. Annals of Tourism Research, 30 (3), 702-719 PDFДокумент18 страницChhabra, D., Healy, R., & Sills, E. (2003) - Staged Authenticity and Heritage Tourism. Annals of Tourism Research, 30 (3), 702-719 PDF余鸿潇Оценок пока нет
- Complete PDFДокумент495 страницComplete PDFMárcio MoscosoОценок пока нет
- Mezbah Uddin Ahmed (173-017-054) Chapter 11Документ12 страницMezbah Uddin Ahmed (173-017-054) Chapter 11riftОценок пока нет
- Enunciado de La Pregunta: Finalizado Se Puntúa 1.00 Sobre 1.00Документ9 страницEnunciado de La Pregunta: Finalizado Se Puntúa 1.00 Sobre 1.00Samuel MojicaОценок пока нет
- Strategic ManagementДокумент14 страницStrategic ManagementvishakhaОценок пока нет
- Best-First SearchДокумент2 страницыBest-First Searchgabby209Оценок пока нет
- United States Court of Appeals, Third CircuitДокумент1 страницаUnited States Court of Appeals, Third CircuitScribd Government DocsОценок пока нет
- Quarter: FIRST Week: 2: Ballecer ST., Central Signal, Taguig CityДокумент2 страницыQuarter: FIRST Week: 2: Ballecer ST., Central Signal, Taguig CityIRIS JEAN BRIAGASОценок пока нет
- Term-2 - Grade 8 Science (Biology) Mock Paper-2Документ3 страницыTerm-2 - Grade 8 Science (Biology) Mock Paper-2bhagat100% (1)
- Etta Calhoun v. InventHelp Et Al, Class Action Lawsuit Complaint, Eastern District of Pennsylvania (6/1/8)Документ44 страницыEtta Calhoun v. InventHelp Et Al, Class Action Lawsuit Complaint, Eastern District of Pennsylvania (6/1/8)Peter M. HeimlichОценок пока нет
- Fansubbers The Case of The Czech Republic and PolandДокумент9 страницFansubbers The Case of The Czech Republic and Polandmusafir24Оценок пока нет
- Infusion Site Selection and Infusion Set ChangeДокумент8 страницInfusion Site Selection and Infusion Set ChangegaridanОценок пока нет
- Hercules Industries Inc. v. Secretary of Labor (1992)Документ1 страницаHercules Industries Inc. v. Secretary of Labor (1992)Vianca MiguelОценок пока нет