Вам также может понравиться
- JZS161 Toyota Aristo 2JZДокумент23 страницыJZS161 Toyota Aristo 2JZShaukat Zia100% (4)
- Design of Dredging Equipment PDFДокумент323 страницыDesign of Dredging Equipment PDFMike Roy88% (8)
- Mounded Bullets LPG Terminal Reference TenderДокумент1 033 страницыMounded Bullets LPG Terminal Reference TenderKazeem67% (6)
- Designing Dredging Equipment CSDДокумент79 страницDesigning Dredging Equipment CSDedraket145Оценок пока нет
- Dredging PresentationДокумент19 страницDredging Presentationkvs1411100% (2)
- Ship and Boat Building and Repair-5Документ5 страницShip and Boat Building and Repair-5navalmamunОценок пока нет
- Stowing PracticeДокумент7 страницStowing PracticeNitesh Shah100% (3)
- Trailing Suction Hopper DredgerДокумент109 страницTrailing Suction Hopper Dredgerldaels100% (3)
- Dredging ManualДокумент21 страницаDredging Manualgeraldo gil100% (1)
- Design of Dredging Equipment (TUDelft)Документ323 страницыDesign of Dredging Equipment (TUDelft)Junwhan Kim100% (1)
- Dredging TechniquesДокумент34 страницыDredging Techniquesgeraldo gil100% (1)
- Dredger Design PDFДокумент97 страницDredger Design PDFshimul200883% (6)
- DredgingДокумент35 страницDredgingsanjivsing60% (5)
- Handbook of Dredging ActivitiesДокумент57 страницHandbook of Dredging Activitiesulhas_nakashe0% (1)
- Cutter Suction DredgerДокумент79 страницCutter Suction DredgerAkash Desai100% (1)
- Dredging in Figures 2012 PDFДокумент9 страницDredging in Figures 2012 PDFagarwal.rmОценок пока нет
- Hydromax ManualДокумент252 страницыHydromax Manualmanon160100% (1)
- Physical Modelling and Design of A Floating Concrete Breakwater in Richards Bay HarbourДокумент9 страницPhysical Modelling and Design of A Floating Concrete Breakwater in Richards Bay HarbourDimasОценок пока нет
- Dredging-MS 1Документ26 страницDredging-MS 1Nikhil Raju100% (2)
- Dredging Processes Hopper SedimentationДокумент143 страницыDredging Processes Hopper Sedimentationdanielmergulho100% (2)
- DredgingДокумент37 страницDredgingsmith858100% (4)
- Employment in Double Shifts: Dredging As A TraditionДокумент5 страницEmployment in Double Shifts: Dredging As A Tradition4usammy100% (1)
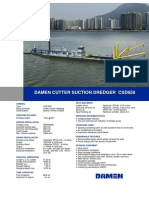
- Damen Cutter Suction Dredger 650Документ2 страницыDamen Cutter Suction Dredger 650Fajrin M. NatsirОценок пока нет
- Trailing Suction Hopper Dredger SpecificationДокумент51 страницаTrailing Suction Hopper Dredger SpecificationuygarkoprucuОценок пока нет
- Environmental Dredging ConsiderationsДокумент441 страницаEnvironmental Dredging Considerationsvictoraboje100% (3)
- Structural Analysis of Hopper Suction DredgerДокумент10 страницStructural Analysis of Hopper Suction DredgerIvan GrbavacОценок пока нет
- Dredging and Marine Works en 0Документ48 страницDredging and Marine Works en 0tonni.s36100% (2)
- Bangladesh Waterways AssessmentДокумент24 страницыBangladesh Waterways AssessmentAr Sai Prashanth100% (1)
- Live Graving Dry DockДокумент36 страницLive Graving Dry DockAshiq AbdullahОценок пока нет
- LECTURE No.6: Anchor Handlers or Anchor Handling Vessels (AHV) Is Very Powerful Ships ThatДокумент12 страницLECTURE No.6: Anchor Handlers or Anchor Handling Vessels (AHV) Is Very Powerful Ships ThatMiruna ClinciuОценок пока нет
- Dredging System PresentationДокумент56 страницDredging System PresentationlchengalvaОценок пока нет
- Dredging Feasibility EvaluationДокумент95 страницDredging Feasibility Evaluationsekhar4u303739Оценок пока нет
- Data Sheet TSHD 5000: GeneralДокумент2 страницыData Sheet TSHD 5000: GeneralOvan Indra Abdi PamungkasОценок пока нет
- B Ba Ar RG Gee A Asssseessssm Meen NTT C Co Om MP Plleem Meen NTTДокумент19 страницB Ba Ar RG Gee A Asssseessssm Meen NTT C Co Om MP Plleem Meen NTTahong100Оценок пока нет
- A Complete Guide of Bringing A Ship To Dry Dock: Written by On April 10, 2016Документ11 страницA Complete Guide of Bringing A Ship To Dry Dock: Written by On April 10, 2016Panagiotis MouzenidisОценок пока нет
- Grab Hopper DredgerДокумент40 страницGrab Hopper DredgerPeter John Packiaraj100% (1)
- Study of Bollard Pull Harbour Tug: Focuses On Stability and Straight MovementДокумент14 страницStudy of Bollard Pull Harbour Tug: Focuses On Stability and Straight MovementGoutam Kumar SahaОценок пока нет
- Boat Design GlossaryДокумент10 страницBoat Design GlossaryTarek MohamedОценок пока нет
- Comissionamento Do Sistema de Pull in PDFДокумент65 страницComissionamento Do Sistema de Pull in PDFrfelippe8733Оценок пока нет
- Dry DockДокумент13 страницDry DockJithesh.k.sОценок пока нет
- MooringДокумент38 страницMooringBinh Pham100% (1)
- BS177-179 36te Tensioner Data SheetДокумент4 страницыBS177-179 36te Tensioner Data SheetSeeSubseaОценок пока нет
- Inclining TestДокумент6 страницInclining TestVanjimuthu VelusamyОценок пока нет
- Slipways 1Документ26 страницSlipways 1Nabeh Wildan100% (2)
- Loc Survey ReportДокумент26 страницLoc Survey Reportluckystrike9008100% (1)
- Annexure 01 Dry Dock Specifications CPДокумент43 страницыAnnexure 01 Dry Dock Specifications CPAnonymous XtvvG80zuОценок пока нет
- Tug & Barge MattersДокумент28 страницTug & Barge Matterssealion72100% (1)
- DredgingДокумент10 страницDredgingsanjivsingОценок пока нет
- Kelompok V PengerukanДокумент34 страницыKelompok V Pengerukanratna100% (1)
- Pengerukan Dan ReklamasiДокумент64 страницыPengerukan Dan ReklamasiirfaniyantiОценок пока нет
- Chapter 4 Plain Suction DredgersДокумент35 страницChapter 4 Plain Suction DredgersirfaniyantiОценок пока нет
- 6 The Bucket DredgerДокумент25 страниц6 The Bucket Dredgerفردوس سليمانОценок пока нет
- 003 Hydrolic DredgerДокумент25 страниц003 Hydrolic DredgerSumsil ArafinОценок пока нет
- Drilling EngineeringДокумент5 страницDrilling Engineeringsarah alsОценок пока нет
- Driling ProcessДокумент49 страницDriling ProcessfmebirimОценок пока нет
- Vlasblom1 Introduction To Dredging EquipmentДокумент27 страницVlasblom1 Introduction To Dredging EquipmentJayasankar PillaiОценок пока нет
- Chapter (4) Drilling Methods and Type of RigsДокумент26 страницChapter (4) Drilling Methods and Type of RigsFarhat Mirza100% (1)
- Chapter 1 IntroductionДокумент14 страницChapter 1 Introductionsri marwaОценок пока нет
- Drilling Methods and Type of Rigs PDFДокумент26 страницDrilling Methods and Type of Rigs PDFnamdq-1Оценок пока нет
- Drilling Rig - Wikipedia, The Free EncyclopediaДокумент13 страницDrilling Rig - Wikipedia, The Free EncyclopediasomsubhraОценок пока нет
- Drilling Engineering Chapter 1Документ41 страницаDrilling Engineering Chapter 1Wong Jin Yang100% (2)
- Shubhamkeshri 170920083412 DredgingДокумент19 страницShubhamkeshri 170920083412 DredgingMuhammad Fadhil ImansyahОценок пока нет
- Health Requirements and Standards Guideline For Collective Housing For Individuals EngДокумент49 страницHealth Requirements and Standards Guideline For Collective Housing For Individuals EngHussam EzzatОценок пока нет
- Impact of Use of Steel Slag As Coarse Aggregate and Wastewater On Fresh and Hardened Properties of ConcreteДокумент13 страницImpact of Use of Steel Slag As Coarse Aggregate and Wastewater On Fresh and Hardened Properties of ConcreteHussam EzzatОценок пока нет
- XXXXXX Contracting Company L.L.C Project: Sample For Management Academy CourseДокумент17 страницXXXXXX Contracting Company L.L.C Project: Sample For Management Academy CourseHussam EzzatОценок пока нет
- Client SatisfactionДокумент1 страницаClient SatisfactionHussam EzzatОценок пока нет
- Lesson 06-Chapter 6 Slope StabilityДокумент114 страницLesson 06-Chapter 6 Slope StabilityHussam EzzatОценок пока нет
- Link P3 Database With Excel or AccessДокумент13 страницLink P3 Database With Excel or AccessHussam EzzatОценок пока нет
- A35769EДокумент44 страницыA35769Ealsief1951Оценок пока нет
- Sampling SystemДокумент4 страницыSampling Systemaamer6789Оценок пока нет
- WBHE ManualДокумент3 страницыWBHE ManualBruno DelgadoОценок пока нет
- Briggs and Stratton Model 040202-0 12kW Engine ManualДокумент100 страницBriggs and Stratton Model 040202-0 12kW Engine ManualJames Aaron EckermanОценок пока нет
- Khanna's Qbjective Type QuestionsДокумент878 страницKhanna's Qbjective Type Questionsmohit guptaОценок пока нет
- LNG Boil-Off Re-Liquefaction Plants and Gas Combustion UnitsДокумент7 страницLNG Boil-Off Re-Liquefaction Plants and Gas Combustion UnitsAshish SawantОценок пока нет
- How To Use This ManualДокумент154 страницыHow To Use This ManualJames Ernest Garcia100% (1)
- 0 50 S Fuel OperationДокумент56 страниц0 50 S Fuel Operationargentum19619692Оценок пока нет
- AirForce 500i Owner's ManualДокумент40 страницAirForce 500i Owner's ManualHobart Welding ProductsОценок пока нет
- TMPДокумент2 страницыTMPkakaroto produccionesОценок пока нет
- Hydrogen Future of Energy StorageДокумент38 страницHydrogen Future of Energy StorageMuralimohan P MkdОценок пока нет
- Autonomous Maintenance Step 4 Lubrication ModuleДокумент30 страницAutonomous Maintenance Step 4 Lubrication ModulejesusmemОценок пока нет
- IFT BrochureДокумент11 страницIFT BrochureHamid MukhtarОценок пока нет
- Unit 40 Engines and MotorsДокумент13 страницUnit 40 Engines and MotorsMariela BusleimánОценок пока нет
- Transfix DGA 500 Brochure en 2018-06-33116 LTR HRДокумент2 страницыTransfix DGA 500 Brochure en 2018-06-33116 LTR HRlxd.hepОценок пока нет
- Is 3016 1982 PDFДокумент24 страницыIs 3016 1982 PDFVARUN SHARMAОценок пока нет
- AlpinaB5 PartsДокумент48 страницAlpinaB5 PartsLaci100% (1)
- 5 Linde Wawrzinek Funchy-2007Документ15 страниц5 Linde Wawrzinek Funchy-2007Bali PalОценок пока нет
- Training Resume Innocent ItuahДокумент4 страницыTraining Resume Innocent ItuahyagolainОценок пока нет
- Mechanical Engineering Questions and AnswersДокумент3 страницыMechanical Engineering Questions and AnswerskpОценок пока нет
- Model 4: Enjoy The Benefits of Oil Skimming!Документ4 страницыModel 4: Enjoy The Benefits of Oil Skimming!jaime ortizОценок пока нет
- Euro 4 Standard PDFДокумент2 страницыEuro 4 Standard PDFCamellaОценок пока нет
- John Deere 320dДокумент2 страницыJohn Deere 320dNil Acuña0% (2)
- GE3244 Lecture 1Документ66 страницGE3244 Lecture 1Wai-Yen ChanОценок пока нет
- Final Report On HovercraftДокумент70 страницFinal Report On HovercraftSingh KD100% (1)
- Hoisting System............................ : ContentДокумент36 страницHoisting System............................ : ContentMohammed AmerОценок пока нет
- Aircraft General FeedbackДокумент63 страницыAircraft General Feedbackmomanbh100% (1)
- Titan 130Документ2 страницыTitan 130SupermecОценок пока нет