Вам также может понравиться
- Chapter 1Документ116 страницChapter 1muhammad azwan zul-kifleyОценок пока нет
- Basic Principles of VibrationsДокумент6 страницBasic Principles of Vibrationsdskumar49Оценок пока нет
- Oscillations, Waves and OpticsДокумент80 страницOscillations, Waves and OpticsalayuОценок пока нет
- UNIT 2 VibrationДокумент9 страницUNIT 2 VibrationAnonymous POUAc3zОценок пока нет
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11От EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Оценок пока нет
- VibrationsДокумент93 страницыVibrationsbislerinit86% (7)
- Study of Mechanical Vibrations in Dynamics of MachineryДокумент22 страницыStudy of Mechanical Vibrations in Dynamics of MachineryMahesh N PadiaОценок пока нет
- Week 1 Vibration IntroductionДокумент22 страницыWeek 1 Vibration IntroductionSaya SantornoОценок пока нет
- Vibrations SyllabusДокумент5 страницVibrations SyllabusAli SabahОценок пока нет
- Mechanical VibrationДокумент72 страницыMechanical VibrationMuhammadNasir100% (1)
- Week 01-2Документ60 страницWeek 01-2Tariq AlamОценок пока нет
- Chapter 1. - Introduction To VibrationsДокумент14 страницChapter 1. - Introduction To Vibrationstekitech443Оценок пока нет
- VibrationДокумент30 страницVibrationvin4343Оценок пока нет
- Intro VibrationДокумент61 страницаIntro VibrationSameer ShashwatОценок пока нет
- Cheatsheet Mechanical VibrationsДокумент16 страницCheatsheet Mechanical VibrationsTatik JuwariyahОценок пока нет
- Chapter One1Документ28 страницChapter One1Saleamilak tamiruОценок пока нет
- Vibrations and Elements of Aero ElasticityДокумент6 страницVibrations and Elements of Aero ElasticitySathya NarayananОценок пока нет
- Va&C - Unit - II (Part-One)Документ76 страницVa&C - Unit - II (Part-One)Dame AyaneОценок пока нет
- Free Vibration of SDOFДокумент11 страницFree Vibration of SDOFADOBOОценок пока нет
- Chapter 1-1 IntroductionДокумент29 страницChapter 1-1 Introductionالخليل إبراهيمОценок пока нет
- Vibration Example:-DealsДокумент10 страницVibration Example:-DealsmanishtopsecretsОценок пока нет
- Mechanics of Machines Iii-Final Course MaterialsДокумент39 страницMechanics of Machines Iii-Final Course MaterialsKaren DavisОценок пока нет
- Chapter 1-1 Introduction-ModifiedДокумент30 страницChapter 1-1 Introduction-ModifiedAbdalmalek ShamsanОценок пока нет
- Ept474 2dofДокумент118 страницEpt474 2dofLeon OoОценок пока нет
- Free Vibration of SDOFДокумент11 страницFree Vibration of SDOFreneil llegueОценок пока нет
- College of Technology - Riyadh: Kingdom of Saudi ArabiaДокумент87 страницCollege of Technology - Riyadh: Kingdom of Saudi Arabiamohamed fattal100% (1)
- اهتزازاتДокумент31 страницаاهتزازاتMoataz AlorfeОценок пока нет
- Mechanical Vibration: Eng DR Aravinda AbeygunawardaneДокумент26 страницMechanical Vibration: Eng DR Aravinda AbeygunawardaneRashen DilОценок пока нет
- Mechanical Vibration (Mamun Sir)Документ52 страницыMechanical Vibration (Mamun Sir)Nahik KabirОценок пока нет
- MdofДокумент67 страницMdofAnupam SonarОценок пока нет
- Mechanical Vibrations Experiment Leaf PDFДокумент9 страницMechanical Vibrations Experiment Leaf PDFfariskolej4946Оценок пока нет
- Vibrations and Elements of Aerof Elasticity 2marksДокумент8 страницVibrations and Elements of Aerof Elasticity 2marksVasthadu Vasu KannahОценок пока нет
- Assignment NO.6 Rao Arslan: MCVS-021R20P-2Документ9 страницAssignment NO.6 Rao Arslan: MCVS-021R20P-2Arslan RaoОценок пока нет
- VA&C - UNIT - II (Part-Two)Документ107 страницVA&C - UNIT - II (Part-Two)Dame AyaneОценок пока нет
- Lecture 1 IntroductionДокумент25 страницLecture 1 IntroductionKhairin EzzatyОценок пока нет
- Vibration - Wikipedia, The Free EncyclopediaДокумент7 страницVibration - Wikipedia, The Free Encyclopediadidodido_67Оценок пока нет
- Module 1 VibrДокумент11 страницModule 1 VibrShockBlade ZedОценок пока нет
- Mman2300 Part A Unit 1Документ22 страницыMman2300 Part A Unit 1Al Chemist ShahedОценок пока нет
- Short Notes-VibratonsДокумент12 страницShort Notes-VibratonsKevin MorrisОценок пока нет
- Chapter One: 1.1 Basic Concepts of VibrationДокумент6 страницChapter One: 1.1 Basic Concepts of VibrationShuguta LatiОценок пока нет
- My Lecture in Vibration EngineeringДокумент29 страницMy Lecture in Vibration EngineeringrollramsОценок пока нет
- Lecture # 1 Introduction To Mechanical VibrationДокумент2 страницыLecture # 1 Introduction To Mechanical VibrationIjazzzAliОценок пока нет
- A1) IntroДокумент53 страницыA1) IntrochocsoftwareОценок пока нет
- Theory of VibrationДокумент30 страницTheory of VibrationCharles OndiekiОценок пока нет
- Mechanical VibrationsДокумент126 страницMechanical VibrationsSidhant Kumar SahooОценок пока нет
- Me146-2 Vibration Engineering Review QuestionsДокумент5 страницMe146-2 Vibration Engineering Review QuestionsCount AechОценок пока нет
- CH 1 FundamentalsДокумент56 страницCH 1 FundamentalsHussain MuslimОценок пока нет
- SHM PRCДокумент25 страницSHM PRCwillfireОценок пока нет
- Vibrations & Elements of Aeroelasticitytwo Mark Question and AnswerДокумент11 страницVibrations & Elements of Aeroelasticitytwo Mark Question and AnswerVIGNESH RОценок пока нет
- Structural Dynamics 1.2-090921Документ22 страницыStructural Dynamics 1.2-090921santoshОценок пока нет
- Mechanical Vibration: Single Degree of Freedom SystemДокумент69 страницMechanical Vibration: Single Degree of Freedom SystemYoniОценок пока нет
- Lecture 3Документ69 страницLecture 3Abraham ChalaОценок пока нет
- Mechanical Vibrations Week 1Документ57 страницMechanical Vibrations Week 1mrb87Оценок пока нет
- C1070 - NDE RequirementsДокумент7 страницC1070 - NDE RequirementsWill SmithОценок пока нет
- Module 3.1 - Ideal - GasДокумент26 страницModule 3.1 - Ideal - GasMax100% (1)
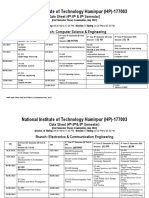
- National Institute of Technology Hamirpur (HP) - 177003: Date Sheet (4, 6 & 8 Semester)Документ11 страницNational Institute of Technology Hamirpur (HP) - 177003: Date Sheet (4, 6 & 8 Semester)sahil thakurОценок пока нет
- I. Multiple Choice. Encircle The Letter of The Correct AnswerДокумент3 страницыI. Multiple Choice. Encircle The Letter of The Correct Answerbart Porcadilla0% (1)
- DECK SLAB - at BridgeДокумент7 страницDECK SLAB - at BridgeazwanОценок пока нет
- 2001 Aristizabal - Semirigid Axial LoadsДокумент10 страниц2001 Aristizabal - Semirigid Axial LoadskarrakukafeoОценок пока нет
- Iso 6157 1 1988Документ9 страницIso 6157 1 1988Hari PrasadОценок пока нет
- Paper Punching MachineДокумент5 страницPaper Punching MachineRahul JainОценок пока нет
- 04 - Newton's Laws of MotionДокумент22 страницы04 - Newton's Laws of MotionArijit MondalОценок пока нет
- Solution Properties of ShellacДокумент6 страницSolution Properties of ShellacstatisticssalesОценок пока нет
- Design of Stiffeners For Industrial Piping Under External Pressure Using FemДокумент6 страницDesign of Stiffeners For Industrial Piping Under External Pressure Using FemJosip KacmarcikОценок пока нет
- Sample Paper 8 MathsДокумент11 страницSample Paper 8 Mathsaneeshkilli2008Оценок пока нет
- Iso 8510 1 1990Документ8 страницIso 8510 1 1990altug deniz CantekinОценок пока нет
- 2020 Online Physics Olympiad (Opho) : Invitational ContestДокумент12 страниц2020 Online Physics Olympiad (Opho) : Invitational ContestBoldie LutwigОценок пока нет
- Cambridge International AS and A Level Physics (9702) : Practical Booklet 4Документ10 страницCambridge International AS and A Level Physics (9702) : Practical Booklet 4Abdul Ahad SajjadОценок пока нет
- Nonlinear Analysis of Pre Stressed Concrete FramesДокумент18 страницNonlinear Analysis of Pre Stressed Concrete FramesLauОценок пока нет
- Applications of Taylor Series in ChemistryДокумент11 страницApplications of Taylor Series in ChemistryIsabelle LotayОценок пока нет
- Pier Cap Corbel 30m SGДокумент3 страницыPier Cap Corbel 30m SGSM ConsultantsОценок пока нет
- Tunset ManualДокумент68 страницTunset ManualMouhammed AbdallahОценок пока нет
- CH-5 Laws of MotionДокумент23 страницыCH-5 Laws of MotionAkash GuptaОценок пока нет
- Schneidercv 23Документ9 страницSchneidercv 23maximus_2000Оценок пока нет
- Evaluating The Dual Porosity of Landfilled Municipal Solid WasteДокумент9 страницEvaluating The Dual Porosity of Landfilled Municipal Solid WasteMary PinОценок пока нет
- Exp 2 Series DC CircuitsДокумент4 страницыExp 2 Series DC Circuitsmaskrasheed777Оценок пока нет
- Blade Steels Bohler T671Документ8 страницBlade Steels Bohler T671PS Pinturas pinturasОценок пока нет
- Lewis Structure VSEPR Theory VB Hybridization WKSTДокумент3 страницыLewis Structure VSEPR Theory VB Hybridization WKSTYahya RajputОценок пока нет
- Carnot Vapor Compression SystemsДокумент1 страницаCarnot Vapor Compression SystemsSUMITОценок пока нет
- MODULE 1 Properties of Working Substance, Concepts of Energy, Laws of ThermodynamicsДокумент58 страницMODULE 1 Properties of Working Substance, Concepts of Energy, Laws of ThermodynamicsNhite NatisonОценок пока нет
- Beijing Institute of Technology FacultyДокумент2 страницыBeijing Institute of Technology FacultyFootball ManiaОценок пока нет
- Rotation Predction Models For Isolated Footing: BITS PilaniДокумент9 страницRotation Predction Models For Isolated Footing: BITS Pilanisaket reddyОценок пока нет
- A Trip To The Stars PDFДокумент51 страницаA Trip To The Stars PDFDennys IzaОценок пока нет
- Summary and Interpretation of Reality TransurfingОт EverandSummary and Interpretation of Reality TransurfingРейтинг: 5 из 5 звезд5/5 (5)
- A Brief History of Time: From the Big Bang to Black HolesОт EverandA Brief History of Time: From the Big Bang to Black HolesРейтинг: 4 из 5 звезд4/5 (2193)
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyОт EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyОценок пока нет
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseОт EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseРейтинг: 3.5 из 5 звезд3.5/5 (69)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldОт EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldРейтинг: 3.5 из 5 звезд3.5/5 (64)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceОт EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceРейтинг: 4 из 5 звезд4/5 (51)
- Lost in Math: How Beauty Leads Physics AstrayОт EverandLost in Math: How Beauty Leads Physics AstrayРейтинг: 4.5 из 5 звезд4.5/5 (125)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessОт EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessРейтинг: 4 из 5 звезд4/5 (6)
- The End of Everything: (Astrophysically Speaking)От EverandThe End of Everything: (Astrophysically Speaking)Рейтинг: 4.5 из 5 звезд4.5/5 (157)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterОт EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterРейтинг: 4.5 из 5 звезд4.5/5 (410)
- Bedeviled: A Shadow History of Demons in ScienceОт EverandBedeviled: A Shadow History of Demons in ScienceРейтинг: 5 из 5 звезд5/5 (5)
- Vibration and Frequency: How to Get What You Want in LifeОт EverandVibration and Frequency: How to Get What You Want in LifeРейтинг: 4.5 из 5 звезд4.5/5 (13)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldОт EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldРейтинг: 4.5 из 5 звезд4.5/5 (54)
- The 60 Minute Quantum Physics Book: Science Made Easy For Beginners Without Math And In Plain Simple EnglishОт EverandThe 60 Minute Quantum Physics Book: Science Made Easy For Beginners Without Math And In Plain Simple EnglishРейтинг: 4.5 из 5 звезд4.5/5 (4)
- Quantum Physics: What Everyone Needs to KnowОт EverandQuantum Physics: What Everyone Needs to KnowРейтинг: 4.5 из 5 звезд4.5/5 (49)
- The Beginning of Infinity: Explanations That Transform the WorldОт EverandThe Beginning of Infinity: Explanations That Transform the WorldРейтинг: 5 из 5 звезд5/5 (60)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОт EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeОценок пока нет
- The Holographic Universe: The Revolutionary Theory of RealityОт EverandThe Holographic Universe: The Revolutionary Theory of RealityРейтинг: 4.5 из 5 звезд4.5/5 (78)
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessОт EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessРейтинг: 4.5 из 5 звезд4.5/5 (57)
- The Illustrated Theory of Everything: The Origin and Fate of the UniverseОт EverandThe Illustrated Theory of Everything: The Origin and Fate of the UniverseРейтинг: 5 из 5 звезд5/5 (1)
- Packing for Mars: The Curious Science of Life in the VoidОт EverandPacking for Mars: The Curious Science of Life in the VoidРейтинг: 4 из 5 звезд4/5 (1396)
- AP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОт EverandAP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeОценок пока нет