Вам также может понравиться
- Control Systems - LECTURE NOTESДокумент132 страницыControl Systems - LECTURE NOTESgutha manikantaОценок пока нет
- Chapter 3 A Forward and Inverse KinematisДокумент47 страницChapter 3 A Forward and Inverse KinematisCharlton S.Inao100% (5)
- Aspects of Rhythm in Webern's Atonal Music - FORTE, Allen PDFДокумент22 страницыAspects of Rhythm in Webern's Atonal Music - FORTE, Allen PDFDimitrios Sykias100% (1)
- Chapter 3 C DH Representation For Robotic ManipulatorsДокумент88 страницChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- Unit 1 Control SystemДокумент86 страницUnit 1 Control SystemVijay Ct67% (3)
- Controlsystem Unit 1Документ309 страницControlsystem Unit 1pullagura sowmyaОценок пока нет
- Week 1 - Intro To Control SystemsДокумент45 страницWeek 1 - Intro To Control SystemsArkie BajaОценок пока нет
- EE2253 - Control Systems PDFДокумент124 страницыEE2253 - Control Systems PDFaduveyОценок пока нет
- EE2253 - Control SystemsДокумент124 страницыEE2253 - Control SystemsrameshsmeОценок пока нет
- Control Systems NotesДокумент133 страницыControl Systems Noteseee limatОценок пока нет
- 1 Introduction To Control SystemsДокумент17 страниц1 Introduction To Control SystemsMuhammad Farhan100% (1)
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresОт EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresОценок пока нет
- Basics of Control EngineeringДокумент245 страницBasics of Control EngineeringHezron gibronОценок пока нет
- Brownian Motion: Langevin EquationДокумент14 страницBrownian Motion: Langevin Equationctasaltin100% (2)
- Pe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01Документ69 страницPe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01OkingszackОценок пока нет
- Introduction To Control SystemsДокумент43 страницыIntroduction To Control SystemsRajeev ValunjkarОценок пока нет
- Unit IДокумент7 страницUnit IanandhОценок пока нет
- Control System 1Документ29 страницControl System 1Gabriel GalizaОценок пока нет
- EE2253 NotesДокумент124 страницыEE2253 NotesSiva Kathikeyan100% (1)
- Report Group OneДокумент70 страницReport Group OneeroksОценок пока нет
- Ece IV Control Systems (10es43) Notes1Документ205 страницEce IV Control Systems (10es43) Notes1Nithindev GuttikondaОценок пока нет
- W1-Introduction of Control SystemДокумент59 страницW1-Introduction of Control SystemFarzana AlyaОценок пока нет
- Linear Control System: Presented by Imran Basha SyedДокумент35 страницLinear Control System: Presented by Imran Basha SyedSyed Imran BashaОценок пока нет
- ECE 331 Complete NotesДокумент129 страницECE 331 Complete NotespolygatoneoderaОценок пока нет
- Lecture - 1 AutomaticsДокумент24 страницыLecture - 1 AutomaticsaliОценок пока нет
- 1 Intro To Feedcon - 1 - STUDДокумент34 страницы1 Intro To Feedcon - 1 - STUDAngelo AralarОценок пока нет
- Lecture No.1 - Control SystemsДокумент41 страницаLecture No.1 - Control SystemsCH MOHAMMAD ATTIR KHAYYAMОценок пока нет
- Introduction To Control SystemДокумент32 страницыIntroduction To Control SystemSaurabh Chandra MishraОценок пока нет
- controlICS CH1Документ5 страницcontrolICS CH1Magarsaa Qana'iiОценок пока нет
- Introduction To Control Systems-Student-2021 - 2022 NewДокумент885 страницIntroduction To Control Systems-Student-2021 - 2022 NewAkpevwe Isire100% (1)
- TEL 433 Lect 01 NOTE IntroductionДокумент9 страницTEL 433 Lect 01 NOTE IntroductionTestimonyОценок пока нет
- Topic 1. Introduction To Control Systems DesignДокумент14 страницTopic 1. Introduction To Control Systems DesignxREDCivicCometxОценок пока нет
- Cpe 315 Feedback Control System LessonsДокумент28 страницCpe 315 Feedback Control System Lessonskeny amigableОценок пока нет
- Lecture 1Документ31 страницаLecture 1faruktokuslu16Оценок пока нет
- Lec 01 BcsДокумент27 страницLec 01 Bcsapi-247714257Оценок пока нет
- Control Theory IДокумент6 страницControl Theory IChelsea Debra DraruОценок пока нет
- Me55 Control Engineering (Common To ME/IP/MA/AU) Sub Code: ME55 IA Marks: 25 Hrs/Week: 04 Exam Hours: 03 Total HRS.: 52 Exam Marks:100Документ7 страницMe55 Control Engineering (Common To ME/IP/MA/AU) Sub Code: ME55 IA Marks: 25 Hrs/Week: 04 Exam Hours: 03 Total HRS.: 52 Exam Marks:100Manasa Sathyanarayana SОценок пока нет
- Control Systems NotesДокумент74 страницыControl Systems NotesNirjal RanipaОценок пока нет
- AUTOMATIC - CONTROL - SYSTEM - UNIT - 1 - For MergeДокумент45 страницAUTOMATIC - CONTROL - SYSTEM - UNIT - 1 - For MergemanishaОценок пока нет
- 1 Control - Systems - NotesДокумент19 страниц1 Control - Systems - NotesTaku Teekay MatangiraОценок пока нет
- Automatic Control: Open Loop Control Systems: A System in Which The Output Has No Effect On The Control Action IsДокумент11 страницAutomatic Control: Open Loop Control Systems: A System in Which The Output Has No Effect On The Control Action IsmjoОценок пока нет
- Chapter OneДокумент28 страницChapter OneSurafel TadesseОценок пока нет
- Control Engineering PDFДокумент164 страницыControl Engineering PDFsanthoshramrОценок пока нет
- CS Basic1Документ12 страницCS Basic1mansoorОценок пока нет
- Feedback Intro NotesДокумент4 страницыFeedback Intro NotesChoco MeowMeowОценок пока нет
- Unit-1 NotesДокумент43 страницыUnit-1 NotesMD SHAHRIARMAHMUDОценок пока нет
- Chapter1 - Introduction To Automatic ControlДокумент37 страницChapter1 - Introduction To Automatic ControlAhmed awwadОценок пока нет
- Control System Engineering (15A02303) : Lecture Note B.TechДокумент126 страницControl System Engineering (15A02303) : Lecture Note B.TechNAZMUS SAKIBОценок пока нет
- Control SystemsДокумент29 страницControl SystemsBrenton DahlОценок пока нет
- W EE 418 - Lecture 1 Overview and IntroductionДокумент56 страницW EE 418 - Lecture 1 Overview and IntroductionGGAP LASTОценок пока нет
- Control Systems Notes DEE M2 JuneДокумент34 страницыControl Systems Notes DEE M2 JuneThairu MuiruriОценок пока нет
- 3-1 Control System PresentationДокумент361 страница3-1 Control System PresentationBhavsingh Dharavath0% (1)
- Autotronics and Vehicle Intelligence : Aeng6205Документ25 страницAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinОценок пока нет
- Process Control & Automation: Sobukola, O.P. (PHD) /kajihausa, O.E. (MRS)Документ24 страницыProcess Control & Automation: Sobukola, O.P. (PHD) /kajihausa, O.E. (MRS)gobra senОценок пока нет
- Feedback Control TheoryДокумент16 страницFeedback Control TheorykelvinОценок пока нет
- Lecture 1 Control SystemsДокумент18 страницLecture 1 Control SystemsMohammed AshrafОценок пока нет
- L1 - Introduction To ControlДокумент26 страницL1 - Introduction To ControlAbdullahi Zubairu SokombaОценок пока нет
- ME 461 Control Engineering: Semester: July 2017Документ32 страницыME 461 Control Engineering: Semester: July 2017Sudipta PaulОценок пока нет
- Control System EngineeringДокумент95 страницControl System EngineeringAbdulrahmanОценок пока нет
- Control Theories Commonly Used Today Are Classical Control TheoryДокумент12 страницControl Theories Commonly Used Today Are Classical Control TheoryJuliánОценок пока нет
- Seea1502 - Control Systems: MentorsДокумент16 страницSeea1502 - Control Systems: MentorsNeerajОценок пока нет
- Control Systems NotesДокумент152 страницыControl Systems Notesdarlachantisaideepthi450Оценок пока нет
- Week 3 B 2 Electric MotorsДокумент59 страницWeek 3 B 2 Electric MotorsCharlton S.InaoОценок пока нет
- CH 5 Weeks 12-15 PLC Mechatronics Pe 4030 Dec 21Документ152 страницыCH 5 Weeks 12-15 PLC Mechatronics Pe 4030 Dec 21Charlton S.InaoОценок пока нет
- Week 1 Robotics Lecture 1Документ63 страницыWeek 1 Robotics Lecture 1Charlton S.InaoОценок пока нет
- Week 10 Part 1 PE 6282 Block DiagramДокумент53 страницыWeek 10 Part 1 PE 6282 Block DiagramCharlton S.InaoОценок пока нет
- PE 4030chapter 1 Mechatronics 9 23 2013 Rev 1.0Документ76 страницPE 4030chapter 1 Mechatronics 9 23 2013 Rev 1.0Charlton S.InaoОценок пока нет
- Tutorial 4 Flow Over Infinite CylinderДокумент22 страницыTutorial 4 Flow Over Infinite CylinderCharlton S.InaoОценок пока нет
- Composite MaterialsДокумент399 страницComposite MaterialsCharlton S.Inao100% (1)
- Week 8 Steady Stat Classification May 04 2012Документ25 страницWeek 8 Steady Stat Classification May 04 2012Charlton S.InaoОценок пока нет
- Problem Description:: Tutorial 1: Parallel PlatesДокумент17 страницProblem Description:: Tutorial 1: Parallel PlatesCharlton S.InaoОценок пока нет
- Tutorial 3 Diverging FlowДокумент26 страницTutorial 3 Diverging FlowCharlton S.InaoОценок пока нет
- Reliability Eng Syllabus PE-4211 Armaments Sept 27Документ7 страницReliability Eng Syllabus PE-4211 Armaments Sept 27Charlton S.InaoОценок пока нет
- CAD - MID - EXAM - 2012 PE-3011 CsiДокумент6 страницCAD - MID - EXAM - 2012 PE-3011 CsiCharlton S.InaoОценок пока нет
- Laminar Flow Over Flat PlateДокумент17 страницLaminar Flow Over Flat PlateCharlton S.InaoОценок пока нет
- Enhancement With Design of The BTR Turret Control System by DigitalizingДокумент28 страницEnhancement With Design of The BTR Turret Control System by DigitalizingCharlton S.InaoОценок пока нет
- Pe-4030 CH 4 Pneumatic and Hydraulic Actuation System Oct 29Документ99 страницPe-4030 CH 4 Pneumatic and Hydraulic Actuation System Oct 29Charlton S.InaoОценок пока нет
- Criteria For Land LevelingДокумент12 страницCriteria For Land LevelingtizazuОценок пока нет
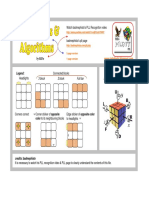
- PLL PatternsДокумент6 страницPLL PatternsMax PaheinОценок пока нет
- MAXWELL EQUATIONS 1stДокумент4 страницыMAXWELL EQUATIONS 1stMuhammad IshtiaqОценок пока нет
- Math Unit Test 2Документ2 страницыMath Unit Test 2divya shreeОценок пока нет
- Stata ExcelДокумент44 страницыStata ExcelchompoonootОценок пока нет
- Perspective Rectangle Detection: David Shaw and Nick BarnesДокумент9 страницPerspective Rectangle Detection: David Shaw and Nick BarnesfreedownОценок пока нет
- 01 - Dispersion of A Free Non-Buoyant Fluid JetДокумент5 страниц01 - Dispersion of A Free Non-Buoyant Fluid JetJoren HuernoОценок пока нет
- LocusДокумент20 страницLocusmsaid69Оценок пока нет
- MCA III Complied 23.06.16Документ243 страницыMCA III Complied 23.06.16Shahriar AhmedОценок пока нет
- Research Article: CFD Study of Industrial FCC Risers: The Effect of Outlet Configurations On Hydrodynamics and ReactionsДокумент17 страницResearch Article: CFD Study of Industrial FCC Risers: The Effect of Outlet Configurations On Hydrodynamics and ReactionsAzharuddin_kfupmОценок пока нет
- Calculo, Tratamiento ElementalДокумент488 страницCalculo, Tratamiento Elementaljoseamh69062247Оценок пока нет
- SimulatedTrain Energy Consumption STECДокумент20 страницSimulatedTrain Energy Consumption STECCarlos Redondo BenitezОценок пока нет
- Section 1.1.2 Thermal Conductivity of A GasДокумент2 страницыSection 1.1.2 Thermal Conductivity of A GasGho VinsenОценок пока нет
- Math - Final Time LessonДокумент12 страницMath - Final Time Lessonapi-272910790Оценок пока нет
- Deteksi Kerusakan Motor InduksiДокумент7 страницDeteksi Kerusakan Motor InduksifaturОценок пока нет
- Block Diagrams: Modeling and SimulationДокумент48 страницBlock Diagrams: Modeling and SimulationAbel CabaОценок пока нет
- Classes and Objects in R ProgrammingДокумент25 страницClasses and Objects in R ProgrammingDisha KhuranaОценок пока нет
- Final Project Part2Документ3 страницыFinal Project Part2api-305255197Оценок пока нет
- Ebook C Programming Program Design Including Data Structures 8Th Edition Malik Test Bank Full Chapter PDFДокумент35 страницEbook C Programming Program Design Including Data Structures 8Th Edition Malik Test Bank Full Chapter PDFrowenathuyzdwqr100% (12)
- 12.12.4 Bolt Pre-LoadДокумент25 страниц12.12.4 Bolt Pre-Loadjingyong123Оценок пока нет
- q3 L3a FactorialДокумент25 страницq3 L3a Factorialjovielyn kathley manaloОценок пока нет
- Cambridge IGCSE: PHYSICS 0625/63Документ16 страницCambridge IGCSE: PHYSICS 0625/63...Оценок пока нет
- Modern Robotics, Lynch and Park, Cambridge University Press 1Документ9 страницModern Robotics, Lynch and Park, Cambridge University Press 1MOHIT KUMARОценок пока нет
- Algebra Set - 4Документ2 страницыAlgebra Set - 4Harsh singhalОценок пока нет
- 15 Famous Greek Mathematicians and Their ContributionsДокумент16 страниц15 Famous Greek Mathematicians and Their ContributionsMallari MarjorieОценок пока нет
- EM11Документ17 страницEM11Jerry LedesmaОценок пока нет
- AvizvaДокумент2 страницыAvizvaShashi Kant RawatОценок пока нет
- Leary 2001 Introduction To Behavioral Research Methods Capitol 9Документ25 страницLeary 2001 Introduction To Behavioral Research Methods Capitol 9Diana AndriescuОценок пока нет