Вам также может понравиться
- Unidad 5 CONTROL CLASICOДокумент36 страницUnidad 5 CONTROL CLASICOUlises OGОценок пока нет
- Analisis de Sistemas en El Espacio de Estados.Документ7 страницAnalisis de Sistemas en El Espacio de Estados.Paul Guillen100% (2)
- Compensador de AdelantoДокумент15 страницCompensador de AdelantojohnluzardoОценок пока нет
- Equipo 5 - 3.1. Métodos y Criterios para Sintonizar Controladores PID Discretos.Документ15 страницEquipo 5 - 3.1. Métodos y Criterios para Sintonizar Controladores PID Discretos.Ángeles Fernanda Hernández RomeroОценок пока нет
- Análisis de Respuesta de TiempoДокумент11 страницAnálisis de Respuesta de TiempoDario Manobanda100% (1)
- Reseña Del Desarrollo de Los Sistemas de ControlДокумент3 страницыReseña Del Desarrollo de Los Sistemas de ControlMaritza GuadalupeОценок пока нет
- 3.3. Sistemas de Orden SuperiorДокумент8 страниц3.3. Sistemas de Orden SuperiorYasna Suárez100% (2)
- Semiconvertidor MonofasicoДокумент23 страницыSemiconvertidor MonofasicoPablo Enrique50% (2)
- Generación TrifásicaДокумент8 страницGeneración TrifásicaRodrigo Yupanqui BriceñoОценок пока нет
- Electrónica de Potencia U5Документ10 страницElectrónica de Potencia U5MarcoLunaRiosОценок пока нет
- Estructura de Un AutomatismoДокумент14 страницEstructura de Un AutomatismoDemian Uzziel Torres Guízar100% (1)
- Asignacion de PolosДокумент44 страницыAsignacion de PolosAlexizAyala0% (1)
- Comando IDENT MatlabДокумент7 страницComando IDENT Matlabangel guerreroОценок пока нет
- Ejemplos de Funcion de Transferencia PDFДокумент5 страницEjemplos de Funcion de Transferencia PDFKelvin Ponce100% (4)
- Criterio de Routh-HurwitzДокумент6 страницCriterio de Routh-HurwitzPeter Languila100% (1)
- Primer Parcial 2020 PDFДокумент61 страницаPrimer Parcial 2020 PDFMaxter Dragon100% (1)
- Control Clasico y Control ModernoДокумент20 страницControl Clasico y Control Modernoblak_dragonay50% (4)
- Sistemas Dinámicos de Orden SuperiorДокумент4 страницыSistemas Dinámicos de Orden Superiorroditasv1112100% (2)
- Control II Unidad 1 PDFДокумент127 страницControl II Unidad 1 PDF'Osmayritthoo GLenn'50% (4)
- Importancia de Los Polos y Ceros en El Diseño de ControlДокумент2 страницыImportancia de Los Polos y Ceros en El Diseño de ControlDarwin Vasquez0% (2)
- Importancia de La Instrumentación y ControlДокумент3 страницыImportancia de La Instrumentación y ControlJorge Luis ReyesОценок пока нет
- Subtemas 1.1 y 1.2 Respuesta en Frecuencia y Fasores para La RFДокумент5 страницSubtemas 1.1 y 1.2 Respuesta en Frecuencia y Fasores para La RFluis ferОценок пока нет
- Metodos DesacopladosДокумент10 страницMetodos DesacopladosPamela Norhelia Regalado JapaОценок пока нет
- Material 7 Problemas Sobre Lugar Geométrico 2014-1Документ22 страницыMaterial 7 Problemas Sobre Lugar Geométrico 2014-1Juan Carlos S Q100% (1)
- Circuito RL Sin Fuente PDFДокумент7 страницCircuito RL Sin Fuente PDFfranz cОценок пока нет
- Ogatasol 2Документ51 страницаOgatasol 2Emiliano SegovianoОценок пока нет
- Circuitos Trifasicos DesbalanceadosДокумент9 страницCircuitos Trifasicos DesbalanceadosElvis TubonОценок пока нет
- Ejemplos Transformada Z InversaДокумент4 страницыEjemplos Transformada Z InversahaguilarОценок пока нет
- Tipos de Circuitos Secuenciales 2Документ9 страницTipos de Circuitos Secuenciales 2JavierОценок пока нет
- Capítulo #2 Modelado Matemático de Sistemas de ControlДокумент76 страницCapítulo #2 Modelado Matemático de Sistemas de ControlHector Vergara100% (3)
- Te Control DiДокумент400 страницTe Control Disintoros1100% (2)
- Sistemas Lineales Variables en El Tiempo 1Документ5 страницSistemas Lineales Variables en El Tiempo 1Isaac Valle LunaОценок пока нет
- 2.5. - Espacio de Estados. Relación Entre Función de Transferencia y Espacios de Estado.Документ20 страниц2.5. - Espacio de Estados. Relación Entre Función de Transferencia y Espacios de Estado.Vitola CampuzanoОценок пока нет
- Sistemas de Control Lineales Vs No LinealesДокумент4 страницыSistemas de Control Lineales Vs No LinealesHenry Toro100% (3)
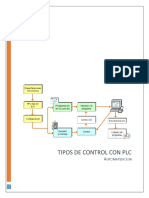
- Tipos de Control Con PLCДокумент3 страницыTipos de Control Con PLCdoggo100% (1)
- Diapositivas ControlДокумент57 страницDiapositivas Controlalexiroger949483% (6)
- Informe - Capítulo 2 Norman NiseДокумент21 страницаInforme - Capítulo 2 Norman NiseKevin Muyón Rivera100% (1)
- Ejercicios 3 PDFДокумент44 страницыEjercicios 3 PDFRicardoОценок пока нет
- Unidad 5 Control ClasicoДокумент24 страницыUnidad 5 Control ClasicoJose AmbrocioОценок пока нет
- Patrón de Polos y Ceros Inv. Unidad 5Документ11 страницPatrón de Polos y Ceros Inv. Unidad 5YinaMoralesОценок пока нет
- Reubicacion de Polos y CerosДокумент9 страницReubicacion de Polos y CerosARAM RIVAS GOMEZ100% (1)
- Reducción de Sistemas de Orden SuperiorДокумент7 страницReducción de Sistemas de Orden SuperiorEnmanuel SalasОценок пока нет
- Trabajo de Investigación RelevadoresДокумент18 страницTrabajo de Investigación RelevadoresEnrique Galindo100% (5)
- Unidad 2 Clase 1 ControlДокумент8 страницUnidad 2 Clase 1 ControlLuisin AОценок пока нет
- Ventajas y Desventajas Relés ElectromécanicoДокумент1 страницаVentajas y Desventajas Relés ElectromécanicoAbraham Silva100% (3)
- Ejemplos Lugar Geométrico de Las RaicesДокумент22 страницыEjemplos Lugar Geométrico de Las RaiceshaguilarОценок пока нет
- Función de Transferencia (Motor Ac y Opamp)Документ4 страницыFunción de Transferencia (Motor Ac y Opamp)Sergio Serquen100% (1)
- Calibración de Instrumentos DigitalesДокумент8 страницCalibración de Instrumentos DigitalesMarioEduardoEspinosaVadilloОценок пока нет
- Algoritmos de ControlДокумент50 страницAlgoritmos de ControlStebhan Sanchez100% (1)
- La Importancia de La Electrónica de PotenciaДокумент3 страницыLa Importancia de La Electrónica de PotenciaChRiss CarvajalОценок пока нет
- Ejercicio Resuelto de Compensación Por Adelanto de Fase Con Ayuda Del CCДокумент9 страницEjercicio Resuelto de Compensación Por Adelanto de Fase Con Ayuda Del CCMaría Ascensión RT100% (2)
- Fases Del Estudio en La Elaboracion de Un AutomatismoДокумент10 страницFases Del Estudio en La Elaboracion de Un AutomatismoWilberth EnriqueОценок пока нет
- Ejercicios NyquistДокумент19 страницEjercicios Nyquistchiquitodeoz92Оценок пока нет
- Equivalentes DiscretosДокумент25 страницEquivalentes DiscretosIsmael BonillaОценок пока нет
- Criterio de Estabilidad de NyquistДокумент6 страницCriterio de Estabilidad de NyquistLuis CoronadoОценок пока нет
- Diagramas de NicholsДокумент8 страницDiagramas de NicholsLaura Berrout Ramos100% (1)
- Criterio de Estabilidad de Nyquist y Diagramas de BodeДокумент7 страницCriterio de Estabilidad de Nyquist y Diagramas de BodeRuben AvalosОценок пока нет
- Grupo 2 - Semana 10Документ51 страницаGrupo 2 - Semana 10Godo SánchezОценок пока нет
- Cortes Villalvazo Gloria INSB Sistemas de Control CriterioДокумент8 страницCortes Villalvazo Gloria INSB Sistemas de Control CriterioFATIMA MARGARITA LOPEZ MAGANAОценок пока нет
- MEJORAS PARA 1ero 5tobloqueДокумент2 страницыMEJORAS PARA 1ero 5tobloqueMarco AlejandroОценок пока нет
- Estudio de La Función de Activación SigmoideДокумент12 страницEstudio de La Función de Activación SigmoideMarco AlejandroОценок пока нет
- Actividad No2. 1er ParcialДокумент6 страницActividad No2. 1er ParcialMarco AlejandroОценок пока нет
- Teorema de Muestreo Con AudioДокумент2 страницыTeorema de Muestreo Con AudioMarco AlejandroОценок пока нет
- Antena HelicoidalДокумент15 страницAntena HelicoidalMarco AlejandroОценок пока нет
- P GasesДокумент5 страницP GasesMarco AlejandroОценок пока нет
- Colf Carbonellhiguera Carlosmartin Tesis PDFДокумент263 страницыColf Carbonellhiguera Carlosmartin Tesis PDFKatherinn VargasОценок пока нет
- Teoría de Orbitales Moleculares Frontera (FMO)Документ25 страницTeoría de Orbitales Moleculares Frontera (FMO)RUBY100% (1)
- Cómo Calcular La Velocidad en La Transmisión Con Correas y Poleas Múltiples PDFДокумент2 страницыCómo Calcular La Velocidad en La Transmisión Con Correas y Poleas Múltiples PDFJavier Aguilera MendozaОценок пока нет
- Análisis No Lineal y Elementos Finitos NIVДокумент20 страницAnálisis No Lineal y Elementos Finitos NIVLUIS FELIPE RUMALDO CASTILLOОценок пока нет
- Planeamiento de La Industria Farmaceutica Peruana 2010 Tesis MBA Tulane CentrumДокумент355 страницPlaneamiento de La Industria Farmaceutica Peruana 2010 Tesis MBA Tulane CentrumAlonso Jimmy Pinto BandaОценок пока нет
- Curso de Mastering en FL Studio 20Документ3 страницыCurso de Mastering en FL Studio 20LolintemОценок пока нет
- El Proposito de La EscrituraДокумент2 страницыEl Proposito de La EscrituraMilagros Herrera80% (5)
- Nom-016 Operación y Mantenimiento de Ferrocarriles Condiciones de Seguridad e HigieneДокумент10 страницNom-016 Operación y Mantenimiento de Ferrocarriles Condiciones de Seguridad e HigieneRaymond MarcialОценок пока нет
- Informática Emily MoretaДокумент3 страницыInformática Emily MoretaCarlos GarciaОценок пока нет
- Complicaciones Del Ciclo Fluvia1Документ5 страницComplicaciones Del Ciclo Fluvia1Claudia Arce Cruz100% (1)
- Técnicas de GrabaciónДокумент4 страницыTécnicas de GrabaciónEthan ArnstbergОценок пока нет
- Plan de Contingencia en Rellenos SanitariosДокумент6 страницPlan de Contingencia en Rellenos Sanitariosjuanes vargasОценок пока нет
- Diseño Pavimentos Vias UrbanasДокумент44 страницыDiseño Pavimentos Vias UrbanaswilderОценок пока нет
- Definicion de Sistema y Visión SistémicaДокумент7 страницDefinicion de Sistema y Visión SistémicaCésar Sánchez MartínezОценок пока нет
- Empatia y Rapport - Conxa PerpinaДокумент9 страницEmpatia y Rapport - Conxa PerpinaValentina Patiño0% (2)
- 001 - Convenio Interinstitucional CADHIMAB CEC SRLДокумент5 страниц001 - Convenio Interinstitucional CADHIMAB CEC SRLMildo FloresОценок пока нет
- ANEXOSnGUIAnTRANSMISIONn2023nDIAGNOSTICO 13650b08c762722Документ66 страницANEXOSnGUIAnTRANSMISIONn2023nDIAGNOSTICO 13650b08c762722libardo jose jimenez difilippoОценок пока нет
- PROPUESTA COMERCIAL Distribuidora VamosДокумент7 страницPROPUESTA COMERCIAL Distribuidora VamosVictor Alfonso ValenciaОценок пока нет
- SILABUS Instalacion y Configuracion de Redes de ComunicacionДокумент2 страницыSILABUS Instalacion y Configuracion de Redes de ComunicacionJuanjo Ajata Velazco67% (3)
- MEZCLADORДокумент3 страницыMEZCLADORMaleja LagunaОценок пока нет
- Directiva Del Curso - Taller de Actualización de TesisДокумент10 страницDirectiva Del Curso - Taller de Actualización de TesisLos Chiroque GamarraОценок пока нет
- Imperglass 3000 4000Документ4 страницыImperglass 3000 4000LuisHerreraОценок пока нет
- Actividad Práctica Unidad 4 - MPyS 2Документ4 страницыActividad Práctica Unidad 4 - MPyS 2Facundo VasquezОценок пока нет
- Tesina Currao Junio 2022Документ93 страницыTesina Currao Junio 2022anahifОценок пока нет
- Gestion de Resultados Parte Ii4223Документ11 страницGestion de Resultados Parte Ii4223Jesús Rafael González TorresОценок пока нет
- Conceptos ErgonomíaДокумент8 страницConceptos ErgonomíaBriyeth Camila Rodriguez ChitivaОценок пока нет
- Plan de Trabajo de Contigencia de Las Areas TodasДокумент61 страницаPlan de Trabajo de Contigencia de Las Areas Todasliz geraldine gongora chavesОценок пока нет
- F AUNI Sem14 DomДокумент4 страницыF AUNI Sem14 DomIwasaki Quiroz AlonsoОценок пока нет
- Actividad 3 - Informe Técnico III - 2022Документ4 страницыActividad 3 - Informe Técnico III - 2022Gonzalo Miranda SuazaОценок пока нет
- Metodología AdHoc Ev ImpactosДокумент28 страницMetodología AdHoc Ev ImpactoscparraguevaraОценок пока нет