Вам также может понравиться
- DC Motor Speed Control Using Chopper CircuitsДокумент32 страницыDC Motor Speed Control Using Chopper CircuitsChetan KotwalОценок пока нет
- Series Resonant Inverter With Bidirectional Switch: ECE 442 Power Electronics 1Документ27 страницSeries Resonant Inverter With Bidirectional Switch: ECE 442 Power Electronics 1mrboyedОценок пока нет
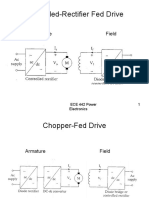
- Controlled-Rectifier Fed Drive: Armature FieldДокумент17 страницControlled-Rectifier Fed Drive: Armature FieldMaverick NaiduОценок пока нет
- ELEC 344 - Module 2 Lecture NotesДокумент45 страницELEC 344 - Module 2 Lecture NotesMax HornerОценок пока нет
- AC To DC ConvertersДокумент18 страницAC To DC ConvertersXen Operation DPHОценок пока нет
- Sinusoidal Steady State Analysis: Chapter ObjectivesДокумент20 страницSinusoidal Steady State Analysis: Chapter ObjectivesPartha MishraОценок пока нет
- Lectures Synchronous MachinesДокумент47 страницLectures Synchronous MachinesSaddy CoolОценок пока нет
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentДокумент63 страницыJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalОценок пока нет
- Chapter 1.2 DC MotorДокумент69 страницChapter 1.2 DC MotorMohammed M. ShobakiОценок пока нет
- Speed Control of Universal Motor Using 1 Phase SemiconverterДокумент2 страницыSpeed Control of Universal Motor Using 1 Phase SemiconverterscribsunilОценок пока нет
- Chapter 2-EE042-3-2-IES-DC MotorДокумент55 страницChapter 2-EE042-3-2-IES-DC Motortanaya.s.gadkariОценок пока нет
- Synchronous Machines GuideДокумент48 страницSynchronous Machines GuideMehtab AhmedОценок пока нет
- Synchronous Motors SlidesДокумент55 страницSynchronous Motors SlidesKaye Freyssinet Nermal Abanggan100% (1)
- VaTech-Lai 4-19Документ72 страницыVaTech-Lai 4-19panchalaiОценок пока нет
- Industrial ElectronicsДокумент74 страницыIndustrial ElectronicsAdriano Mercedes Jr. CanoОценок пока нет
- ECE 442 Power Electronics: - TextДокумент22 страницыECE 442 Power Electronics: - TextaylateОценок пока нет
- MODULE-4Документ22 страницыMODULE-4Mohammed ShoaibОценок пока нет
- Chapter 1 DC Drives Part2Документ75 страницChapter 1 DC Drives Part2Mohammad MunzirОценок пока нет
- ELE-351 Electrical Energy Conversion Electrical Energy ConversionДокумент16 страницELE-351 Electrical Energy Conversion Electrical Energy Conversionhitesh89Оценок пока нет
- Electronic Logic and Auto Flight InstrumentsДокумент178 страницElectronic Logic and Auto Flight InstrumentsCleber SouzaОценок пока нет
- Basics of A Electric Motor: Dcmotor 1Документ47 страницBasics of A Electric Motor: Dcmotor 1selraj0708Оценок пока нет
- Sinusoidal Steady State Analysis: Chapter ObjectivesДокумент20 страницSinusoidal Steady State Analysis: Chapter ObjectivesWESTLY JUCOОценок пока нет
- PSD Course File 2011-12Документ40 страницPSD Course File 2011-12Sethupathi CmОценок пока нет
- DC Motor DrivesДокумент35 страницDC Motor DrivesMahua ChandaОценок пока нет
- Chapter 5-Controlled RectifiersДокумент37 страницChapter 5-Controlled RectifiersBadr Al-SabriОценок пока нет
- Direct - Current Motor Characteristics and ApplicationsДокумент58 страницDirect - Current Motor Characteristics and ApplicationsMaman SomantriОценок пока нет
- Electrical Systems-2Документ38 страницElectrical Systems-2Pegah JanbakhshОценок пока нет
- Module 4 (A) : Controlled RectifiersДокумент22 страницыModule 4 (A) : Controlled RectifiersAishwarya PKamatagiОценок пока нет
- MmuДокумент113 страницMmuSunny SanОценок пока нет
- The Synchronous Generator: 2.1. Synchronizing A Generator To An AC SystemДокумент10 страницThe Synchronous Generator: 2.1. Synchronizing A Generator To An AC SystemsantoshkumarОценок пока нет
- Control System Lab EE-324-FДокумент45 страницControl System Lab EE-324-FDheeraj KumarОценок пока нет
- Dynamic Models: Part C: Electric CircuitsДокумент61 страницаDynamic Models: Part C: Electric CircuitsMuhammadОценок пока нет
- LEC - (DCG P-Operation)Документ22 страницыLEC - (DCG P-Operation)The Youtube TrainОценок пока нет
- PE Chapter 01 Fall 2019Документ51 страницаPE Chapter 01 Fall 2019سید کاظمیОценок пока нет
- Lecture 5: DC Motors: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursДокумент105 страницLecture 5: DC Motors: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursAnonymous m8oCtJBОценок пока нет
- DC Motor DrivesДокумент53 страницыDC Motor DrivesManoj NОценок пока нет
- 2 Modeling of DC MachinesДокумент23 страницы2 Modeling of DC MachinessubhasishpodderОценок пока нет
- DC Motors Speed RegulationДокумент80 страницDC Motors Speed RegulationZargham RanaОценок пока нет
- Lecture DC MachinesДокумент40 страницLecture DC MachinesgeslincarlombetahОценок пока нет
- Power Electronics 2 Eletrical DrivesДокумент123 страницыPower Electronics 2 Eletrical DrivesNaga Ananth100% (1)
- DC-DC Converter Drives Regenerative and Rheostatic BrakingДокумент37 страницDC-DC Converter Drives Regenerative and Rheostatic BrakingShivachandra ChavanОценок пока нет
- InverterДокумент26 страницInverterGs SuОценок пока нет
- Drives and Controls Lab Manual1 PDFДокумент58 страницDrives and Controls Lab Manual1 PDFDinesh ReddyОценок пока нет
- PE1 - Lect 1-PN Junction Diode PrinciplesДокумент32 страницыPE1 - Lect 1-PN Junction Diode PrinciplesAbdel-aziz SamiОценок пока нет
- DC MotorДокумент47 страницDC MotorArun SaraswathyОценок пока нет
- AlternatorДокумент84 страницыAlternatorVignesh Kumar100% (1)
- Lossofexcitation 130805045350 Phpapp01Документ52 страницыLossofexcitation 130805045350 Phpapp01ahvaz1392bОценок пока нет
- DC Shunt Motor Load Test Simulation & ResultsДокумент6 страницDC Shunt Motor Load Test Simulation & ResultsBaba YagaОценок пока нет
- Brushed DC Motor Speed Control with Encoder and H-BridgeДокумент50 страницBrushed DC Motor Speed Control with Encoder and H-BridgeMohammed Benlamlih100% (7)
- Class DutyДокумент58 страницClass DutyHarsha AnantwarОценок пока нет
- Veículos Elétricos e Híbridos - Power Electronics and MotorsДокумент111 страницVeículos Elétricos e Híbridos - Power Electronics and MotorsBruno VescoviОценок пока нет
- ECE 3101 Industrial Electronics: Chopper DrivesДокумент17 страницECE 3101 Industrial Electronics: Chopper Drives17031 Nazmul HasanОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsОт EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsОценок пока нет
- System TheoryДокумент17 страницSystem TheoryMichael CampbellОценок пока нет
- CMOS Fabrication Technologies and Process Design RulesДокумент14 страницCMOS Fabrication Technologies and Process Design RulesSelva KumarОценок пока нет
- EEE ConferenceДокумент4 страницыEEE ConferenceMichael CampbellОценок пока нет
- TNEB TANGEDCO AE Previous Papers - Civil PDFДокумент21 страницаTNEB TANGEDCO AE Previous Papers - Civil PDFMichael CampbellОценок пока нет
- Bannari Amman Institute of Technology, Sathyamangalam Department of EEEДокумент18 страницBannari Amman Institute of Technology, Sathyamangalam Department of EEEMichael CampbellОценок пока нет
- TNEB TANGEDCO AE Previous Papers - MathematicsДокумент40 страницTNEB TANGEDCO AE Previous Papers - MathematicsMichael CampbellОценок пока нет
- Auxillary Words - FinalДокумент1 страницаAuxillary Words - FinalMichael CampbellОценок пока нет
- TNEB TANGEDCO AE Previous Papers - Civil PDFДокумент21 страницаTNEB TANGEDCO AE Previous Papers - Civil PDFMichael CampbellОценок пока нет
- 14 Point s1 Eee - DEcДокумент9 страниц14 Point s1 Eee - DEcMichael CampbellОценок пока нет
- Auxillary Words - FinalДокумент1 страницаAuxillary Words - FinalMichael CampbellОценок пока нет
- Opamp CircuitДокумент24 страницыOpamp Circuitlinuxlism100% (1)
- Opamp CircuitДокумент24 страницыOpamp Circuitlinuxlism100% (1)
- DC Characteristics of Opamps ExplainedДокумент23 страницыDC Characteristics of Opamps ExplainedMichael CampbellОценок пока нет
- SOI Process Using Sapphire as an InsulatorДокумент14 страницSOI Process Using Sapphire as an InsulatorMichael CampbellОценок пока нет
- Logic FamiliesДокумент116 страницLogic FamiliesMichael CampbellОценок пока нет
- Thermal Considerations: Introduction To Electric Drives - Module 1Документ12 страницThermal Considerations: Introduction To Electric Drives - Module 1Michael CampbellОценок пока нет
- November 2017 (v1) QP - Paper 4 CIE Chemistry IGCSEДокумент16 страницNovember 2017 (v1) QP - Paper 4 CIE Chemistry IGCSEGhulam Mehar Ali ShahОценок пока нет
- NTS Test 02 (ANS REQ)Документ6 страницNTS Test 02 (ANS REQ)talal hussainОценок пока нет
- ONGC - Internship - Report Please Don't Edit Directly Make A Copy of This FileДокумент65 страницONGC - Internship - Report Please Don't Edit Directly Make A Copy of This File19024 Fenil PatelОценок пока нет
- Republic of The Philippines Cordillera Administrative Region Municipality of TanudanДокумент1 страницаRepublic of The Philippines Cordillera Administrative Region Municipality of Tanudanpablo gayodanОценок пока нет
- All India Test Series (2023-24)Документ22 страницыAll India Test Series (2023-24)Anil KumarОценок пока нет
- Specification: Constant Current Discharge Characteristics: A (25)Документ2 страницыSpecification: Constant Current Discharge Characteristics: A (25)GeorgeОценок пока нет
- X1jet MX Manual PDFДокумент97 страницX1jet MX Manual PDFrithik srivastavaОценок пока нет
- KeirseyДокумент28 страницKeirseyapi-525703700Оценок пока нет
- Numerical Reasoning Practice Test Answers: de Roza Education and Research 2016Документ2 страницыNumerical Reasoning Practice Test Answers: de Roza Education and Research 2016johnОценок пока нет
- DNV Publication ListДокумент14 страницDNV Publication ListmohammadazraiОценок пока нет
- Radio WavesДокумент17 страницRadio WavesStuart Yong100% (1)
- I-WEB - Com.vn Manual 498031910Документ94 страницыI-WEB - Com.vn Manual 498031910IBJSC.comОценок пока нет
- BiochemistryДокумент39 страницBiochemistryapi-290667341Оценок пока нет
- Doctors Qualifications ExplainedДокумент2 страницыDoctors Qualifications ExplainedKaushika KalaiОценок пока нет
- Fever With Rash in Table Form.Документ4 страницыFever With Rash in Table Form.Azizan HannyОценок пока нет
- Construction Safety Plan GuideДокумент13 страницConstruction Safety Plan Guideemmanueloboh92% (24)
- Write An Essay About The First of Hari Raya DayДокумент1 страницаWrite An Essay About The First of Hari Raya DayShan Tzt50% (4)
- Uco Bank Final (Simple Charts)Документ40 страницUco Bank Final (Simple Charts)gopal8726Оценок пока нет
- Jecoliah J. Joel: Brampton, ON Phone: (647) - 980-1712 Email: Skills and AbilitiesДокумент2 страницыJecoliah J. Joel: Brampton, ON Phone: (647) - 980-1712 Email: Skills and Abilitiesapi-347643327Оценок пока нет
- Pride and Prejudice ScriptДокумент25 страницPride and Prejudice ScriptLaura JaszczОценок пока нет
- International Journal of Diabetes ResearchДокумент6 страницInternational Journal of Diabetes ResearchJulenda CintarinovaОценок пока нет
- Elo TecДокумент2 страницыElo TecMimi MimiОценок пока нет
- Raising Indigenous Chickens in UgandaДокумент9 страницRaising Indigenous Chickens in Ugandashemks79% (38)
- Regulatory Updates on Japan's MO169 Medical Device Quality Management OrdinanceДокумент7 страницRegulatory Updates on Japan's MO169 Medical Device Quality Management OrdinanceHong XuyenОценок пока нет
- NMND - Sustainable Food Centre Thesis Crit 4Документ67 страницNMND - Sustainable Food Centre Thesis Crit 4Nik Ahmad Munawwar Nik DinОценок пока нет
- Manual Book HHO Generator Joko Energy 20Документ72 страницыManual Book HHO Generator Joko Energy 20HusamZarourОценок пока нет
- (Vikhroli West) : Raj LegacyДокумент4 страницы(Vikhroli West) : Raj LegacyNEHA NОценок пока нет
- Commuter Students and Involvement Theory: Rowan Digital WorksДокумент67 страницCommuter Students and Involvement Theory: Rowan Digital WorksDark LegendОценок пока нет
- Homemade Litmus Paper ExperimentДокумент3 страницыHomemade Litmus Paper ExperimentEmmanuelle NazarenoОценок пока нет
- Hawaii Hotel Performance by WeekДокумент1 страницаHawaii Hotel Performance by WeekHonolulu Star-AdvertiserОценок пока нет