Вам также может понравиться
- CH06 Memory OrganizationДокумент85 страницCH06 Memory OrganizationBiruk KassahunОценок пока нет
- Computer Architecture - Memory SystemДокумент22 страницыComputer Architecture - Memory Systemamit_coolbuddy20100% (1)
- Lec08 - Instruction Sets - Characteristics and FunctionsДокумент44 страницыLec08 - Instruction Sets - Characteristics and FunctionsTAN SOO CHIN0% (1)
- Chapter 2 (Part II) - Instruction Sets (Characteristics and Functions)Документ49 страницChapter 2 (Part II) - Instruction Sets (Characteristics and Functions)Kirubel EsayasОценок пока нет
- Complete Guide For Computer Hardware NewbiesДокумент47 страницComplete Guide For Computer Hardware NewbiesMicky PautuОценок пока нет
- L01 IntroductionToComputerSystemsДокумент17 страницL01 IntroductionToComputerSystemsDyan AngelicaОценок пока нет
- Chapter 01 - Introduction To Computer SystemДокумент50 страницChapter 01 - Introduction To Computer SystemNaim EastbulletОценок пока нет
- Computer ArchitectureДокумент104 страницыComputer ArchitectureapuurvaОценок пока нет
- Chapter 2Документ29 страницChapter 2Roma AmorОценок пока нет
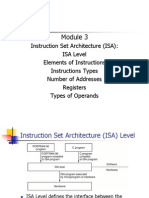
- Computer Organization: Instruction Set ArchitectureДокумент148 страницComputer Organization: Instruction Set ArchitecturekaneeshaОценок пока нет
- Module3 ISAДокумент51 страницаModule3 ISAwatsontamilОценок пока нет
- Introduction To Embedded SystemДокумент42 страницыIntroduction To Embedded SystemMohd FahmiОценок пока нет
- CPSC 105 PC Security and Privacy: How Computers WorkДокумент74 страницыCPSC 105 PC Security and Privacy: How Computers WorkAnonymous O7NI8R3gFAОценок пока нет
- 23 Computer Application Commerce Unit-02Документ42 страницы23 Computer Application Commerce Unit-02Kishore KrishnanОценок пока нет
- Memory OrganizationДокумент30 страницMemory OrganizationPARITOSHОценок пока нет
- P11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyДокумент45 страницP11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyMohanty AyodhyaОценок пока нет
- New Cortex-R Processors For Lte and 4g Mobile BasebandДокумент6 страницNew Cortex-R Processors For Lte and 4g Mobile BasebandSaiteja ReddyОценок пока нет
- Chapter 17: Disk Storage, Basic File Structures, and HashingДокумент54 страницыChapter 17: Disk Storage, Basic File Structures, and HashingUsman IlamdinОценок пока нет
- CHMA Unit - VДокумент25 страницCHMA Unit - VSayyan Shaikh100% (1)
- Lecture1 - Introduction To Embbeded System DesignДокумент29 страницLecture1 - Introduction To Embbeded System DesignĐức Anh CОценок пока нет
- T2.3 (Computer Component - Storage)Документ31 страницаT2.3 (Computer Component - Storage)com1012_icamОценок пока нет
- Introduction To Embedded SystemsДокумент50 страницIntroduction To Embedded SystemsAmbika NaikОценок пока нет
- Computer Network - CS610 Power Point Slides Lecture 08Документ30 страницComputer Network - CS610 Power Point Slides Lecture 08Ibrahim Choudary100% (1)
- Memory and Its TypesДокумент36 страницMemory and Its TypesAaruni100% (1)
- Embedded Systems - MSC Sem III (Final)Документ162 страницыEmbedded Systems - MSC Sem III (Final)nОценок пока нет
- Cortex R4 White PaperДокумент20 страницCortex R4 White PaperRAJARAMОценок пока нет
- Interprocess CommunicationДокумент16 страницInterprocess CommunicationVinuthna ReddyОценок пока нет
- Practical # 01: Introduction To Computers, Parts of Computers and Architecture of Computer Tools: 1.1 What Is Computer?Документ13 страницPractical # 01: Introduction To Computers, Parts of Computers and Architecture of Computer Tools: 1.1 What Is Computer?funny videosОценок пока нет
- Computer 1 With Applications: Introduction To ComputersДокумент23 страницыComputer 1 With Applications: Introduction To ComputersDonna Hernandez100% (1)
- Multiple Access Protocols: (Aloha, Csma, Csma/Cd)Документ17 страницMultiple Access Protocols: (Aloha, Csma, Csma/Cd)Himanshu Dhameja100% (7)
- Basics of Operating SystemsДокумент31 страницаBasics of Operating Systemsyyhh yhyhyОценок пока нет
- Introduction To Information Technology: DR Dharmendra Kumar KanchanДокумент83 страницыIntroduction To Information Technology: DR Dharmendra Kumar KanchanSadhika KatiyarОценок пока нет
- Microprocessor UNIT - IVДокумент87 страницMicroprocessor UNIT - IVMani GandanОценок пока нет
- Introduction To Operating SystemДокумент59 страницIntroduction To Operating SystemSAPTARSHI GHOSHОценок пока нет
- Advanced Processor SuperscalarclassДокумент73 страницыAdvanced Processor SuperscalarclassKanaga Varatharajan50% (2)
- Unit - 6 Input/output Organization Introduction To Bus ArchitectureДокумент14 страницUnit - 6 Input/output Organization Introduction To Bus ArchitectureAyushi SinghОценок пока нет
- ESARM Unit-III and IV Slides MergedДокумент301 страницаESARM Unit-III and IV Slides MergedShashipreetham LakkakulaОценок пока нет
- Secondary Storage DevicesДокумент34 страницыSecondary Storage DevicesPiyushE63Оценок пока нет
- Operating SystemДокумент49 страницOperating Systemsatish161188Оценок пока нет
- Power Reduction Through RTL Clock GatingДокумент10 страницPower Reduction Through RTL Clock GatingAishwarya TekkalakotaОценок пока нет
- ArchitectureДокумент21 страницаArchitecturepriyankaОценок пока нет
- Computer Architecture & Organization UNIT 1Документ17 страницComputer Architecture & Organization UNIT 1Nihal GuptaОценок пока нет
- Coa - Memory OrganizationДокумент31 страницаCoa - Memory Organizationbhulakshmidevi50% (2)
- Presentation On Hard Disks: By-Satyam JhawarДокумент23 страницыPresentation On Hard Disks: By-Satyam JhawarSatyam JhawarОценок пока нет
- Unit 3 - Memory OrganizationДокумент98 страницUnit 3 - Memory OrganizationVanshaj JainОценок пока нет
- CS1010 Introduction To Computing: (Computer Software)Документ65 страницCS1010 Introduction To Computing: (Computer Software)asad shahОценок пока нет
- Introduction To System On ChipДокумент110 страницIntroduction To System On ChipKiệt PhạmОценок пока нет
- Real Time Operating SystemsДокумент35 страницReal Time Operating SystemsNeerajBooraОценок пока нет
- Lecture 2 - ARM Instruction SetДокумент42 страницыLecture 2 - ARM Instruction SetSuhaib AbugderaОценок пока нет
- Superscaling in Computer ArchitectureДокумент9 страницSuperscaling in Computer ArchitectureC183007 Md. Nayem HossainОценок пока нет
- Processors: by Nipun Sharma ID: 1411981520Документ24 страницыProcessors: by Nipun Sharma ID: 1411981520shenbagaraman cseОценок пока нет
- 4 SchedulingДокумент37 страниц4 Schedulingreply2amit1986Оценок пока нет
- Types of Computer & Their PartsДокумент6 страницTypes of Computer & Their PartsImtiaz AhmedОценок пока нет
- Memory ManagementДокумент21 страницаMemory ManagementmaheshbhagtaniОценок пока нет
- Csa Mod 2Документ28 страницCsa Mod 2anusarat100% (1)
- Chapter 1 Introduction To ComputerДокумент44 страницыChapter 1 Introduction To ComputerHana BertianiОценок пока нет
- Coa Unit 1Документ28 страницCoa Unit 1vivek kumarОценок пока нет
- Unit 6 Memory OrganizationДокумент24 страницыUnit 6 Memory OrganizationAnurag GoelОценок пока нет
- CH 2 Fundamentals of ComputersДокумент32 страницыCH 2 Fundamentals of ComputersFaisal MalekОценок пока нет
- Block Diagram of MotherboardДокумент9 страницBlock Diagram of MotherboardJay Zala0% (1)
- TLE-ICT-Computer-Hardware-Servicing-LM Module 3RD QUARTER M4Документ8 страницTLE-ICT-Computer-Hardware-Servicing-LM Module 3RD QUARTER M4OmengMagcalasОценок пока нет
- Microprocessor System Design: Bùi Quốc Bảo (buiquocbao@hcmut.edu.vn)Документ56 страницMicroprocessor System Design: Bùi Quốc Bảo (buiquocbao@hcmut.edu.vn)gaikieuucОценок пока нет
- Lecture 3 Unit 1 Introduction To Microcomputer SystemsДокумент8 страницLecture 3 Unit 1 Introduction To Microcomputer SystemsvinitkumarОценок пока нет
- IPSGD enДокумент114 страницIPSGD enJuan Carlos Diaz SabanillaОценок пока нет
- Fm452 Operating Instructions en-USДокумент200 страницFm452 Operating Instructions en-USyasirdabirОценок пока нет
- Computer One Liners-1 PDFДокумент9 страницComputer One Liners-1 PDFPankaj PradhanОценок пока нет
- Name of Students - Roll Numbers: Topic Name: Latest Technology inДокумент20 страницName of Students - Roll Numbers: Topic Name: Latest Technology indihosid99Оценок пока нет
- Coa 2..2Документ42 страницыCoa 2..2Raman Ray 105Оценок пока нет
- MALP Unit 3 29092015 065135AMДокумент15 страницMALP Unit 3 29092015 065135AMN LOKESWARIОценок пока нет
- CpuДокумент14 страницCpuPranshu021Оценок пока нет
- EC2304 - MICROPROCESSORS AND MICROCONTROLLERS Two Marks With Answers - Vidyarthiplus (V+) Blog - A Blog For StudentsДокумент1 страницаEC2304 - MICROPROCESSORS AND MICROCONTROLLERS Two Marks With Answers - Vidyarthiplus (V+) Blog - A Blog For StudentsjeevaОценок пока нет
- Pic16f877 Microcontroller PDFДокумент12 страницPic16f877 Microcontroller PDFShrikant ChamlateОценок пока нет
- Lecture 8Документ40 страницLecture 8vijaygenius123Оценок пока нет
- c04818340 - ProDesk 600 G2 SpecsДокумент116 страницc04818340 - ProDesk 600 G2 SpecsGusОценок пока нет
- The Computer EnvironmentДокумент12 страницThe Computer EnvironmentJung jeonОценок пока нет
- ACCENTUREДокумент22 страницыACCENTUREDhilip AjjanОценок пока нет
- 8085 MicroprocessorДокумент40 страниц8085 Microprocessorvichu-vinu42% (12)
- 18csc203j - Coa Unit 1Документ25 страниц18csc203j - Coa Unit 1Rishabh ShahОценок пока нет
- Atmel Sam d21Документ1 022 страницыAtmel Sam d21Spiinn PhattrakulОценок пока нет
- CSE 322 Mid Spring 2021Документ3 страницыCSE 322 Mid Spring 2021Labeed Jafar Osman 183-15-11848Оценок пока нет
- Computer Architecture Lecture NotesДокумент4 страницыComputer Architecture Lecture Notesmartii86Оценок пока нет
- NN46205-703 03.02 TroubleshootingДокумент466 страницNN46205-703 03.02 TroubleshootingHarikrishna RamanОценок пока нет
- MIC MicroprojectДокумент11 страницMIC Microprojectgirish desaiОценок пока нет
- Microprocessor NotesДокумент140 страницMicroprocessor NotesSaquibh ShaikhОценок пока нет
- IESA FS Report Indian ESDM MarketДокумент172 страницыIESA FS Report Indian ESDM MarketVishnu ReddyОценок пока нет
- PAT America, Inc.: iFLEX5Документ46 страницPAT America, Inc.: iFLEX5grineldo84Оценок пока нет
- Cloudera Data Platform - Data Center (CDP-DC) Reference ArchitectureДокумент38 страницCloudera Data Platform - Data Center (CDP-DC) Reference ArchitectureTech Flame100% (1)
- PicДокумент20 страницPicMohammad Gulam Ahamad100% (3)
- Math CoprocessorДокумент4 страницыMath Coprocessorvikasrana1991Оценок пока нет