Вам также может понравиться
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- FAN May'22 Bogra ShowroomДокумент1 страницаFAN May'22 Bogra ShowroomNura PaglaОценок пока нет
- Troubleshooting Using Current Fault Codes: Code Text StatusДокумент2 страницыTroubleshooting Using Current Fault Codes: Code Text StatusnaftaliОценок пока нет
- APS Super ConductivityДокумент5 страницAPS Super ConductivityRisi SinghОценок пока нет
- MA8692 Supplement EU MLДокумент4 страницыMA8692 Supplement EU MLMaxsilva85Оценок пока нет
- Square D Wiring Diagram BookДокумент109 страницSquare D Wiring Diagram BookVieruth Pascua Paet100% (10)
- WM2T PDFДокумент23 страницыWM2T PDFTodo SbilОценок пока нет
- Drawing 6.6 KV (Single Line)Документ14 страницDrawing 6.6 KV (Single Line)ashu_2787Оценок пока нет
- CHS Exam Final LubethДокумент3 страницыCHS Exam Final LubethLubeth CabatuОценок пока нет
- DC motor voltage, current and power calculationsДокумент10 страницDC motor voltage, current and power calculationsJohn Miko JavierОценок пока нет
- EF370-380 Electronic Overload Relay: Product-DetailsДокумент5 страницEF370-380 Electronic Overload Relay: Product-DetailsYsabel AliagaОценок пока нет
- Panduit Metal Raceway CatalogДокумент112 страницPanduit Metal Raceway CatalognumnummoОценок пока нет
- B. Tech VIth Sem Project Details at J. C. Bose UniversityДокумент5 страницB. Tech VIth Sem Project Details at J. C. Bose UniversitySunny SinghОценок пока нет
- Wireless For The Warrior Volume 1, Amendment No. 2Документ11 страницWireless For The Warrior Volume 1, Amendment No. 2Louis MeulsteeОценок пока нет
- BEKU 2431 Electrical Engineering Laboratory I: Experiment 4: Three-Phase CircuitsДокумент4 страницыBEKU 2431 Electrical Engineering Laboratory I: Experiment 4: Three-Phase CircuitsSyazwan JasniОценок пока нет
- Seats: X250 Body Electrical Systems SeatsДокумент10 страницSeats: X250 Body Electrical Systems Seatsvarol pgnОценок пока нет
- Aks 32RДокумент4 страницыAks 32RgatoluisОценок пока нет
- Reglette Opple Led Wp-U3 1200-40wДокумент4 страницыReglette Opple Led Wp-U3 1200-40wbenzerara younesОценок пока нет
- Arduino MIDI Bass Pedals: Turn Old Organ Pedals into a MIDI ControllerДокумент12 страницArduino MIDI Bass Pedals: Turn Old Organ Pedals into a MIDI ControllerbudituxОценок пока нет
- LK-023-IDN (Temperature, Mass, Volume, Pressure, Length, & Time)Документ9 страницLK-023-IDN (Temperature, Mass, Volume, Pressure, Length, & Time)Aries SupiyantoОценок пока нет
- Easergy P3 Protection Relays - REL52018Документ5 страницEasergy P3 Protection Relays - REL52018gigiopicheli731Оценок пока нет
- Users Manual: Power Quality LoggerДокумент70 страницUsers Manual: Power Quality LoggerAndrew SetiawanОценок пока нет
- A4021a1002 Valve ProvingДокумент21 страницаA4021a1002 Valve ProvingGohar Muhammad KhanОценок пока нет
- Challenge of Fault Location On Long Submarine Power CablesДокумент6 страницChallenge of Fault Location On Long Submarine Power CablesMarcelo Gomes PlanteirОценок пока нет
- Amplificador SamickДокумент2 страницыAmplificador SamickGeorgeFlowers100% (1)
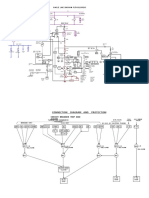
- Diagram PLTA SLJДокумент4 страницыDiagram PLTA SLJMEi Cuiet Luph-LuPhОценок пока нет
- MEAF - 66372 3 en 0801Документ87 страницMEAF - 66372 3 en 0801Andrew Sison92% (12)
- DIY Adriano Obstacle Avoiding CarДокумент6 страницDIY Adriano Obstacle Avoiding CarAshwiniОценок пока нет
- SHE - NGTS 3.2.6 - Current and Voltage Measurement PDFДокумент15 страницSHE - NGTS 3.2.6 - Current and Voltage Measurement PDFBagasОценок пока нет
- M.tech .Electronics071011Документ49 страницM.tech .Electronics071011John WilliamОценок пока нет