Вам также может понравиться
- ASDA-B2 Anual PDFДокумент311 страницASDA-B2 Anual PDFALEXANDRU ZANOAGAОценок пока нет
- UHF RFID Reader Plus Protocol Application Example V1 3 - ENДокумент14 страницUHF RFID Reader Plus Protocol Application Example V1 3 - ENArvind KumarОценок пока нет
- EnMF-12A Worksheet For Corrective & Preventive Action RequestДокумент1 страницаEnMF-12A Worksheet For Corrective & Preventive Action RequestArvind KumarОценок пока нет
- DG Synchronizing PanelДокумент33 страницыDG Synchronizing PanelArvind KumarОценок пока нет
- 12Документ34 страницы12Rafael GagoОценок пока нет
- InvoiceДокумент1 страницаInvoiceArvind KumarОценок пока нет
- HMI Template en PDFДокумент37 страницHMI Template en PDFCao Minh ToànОценок пока нет
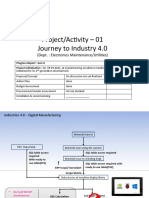
- Project/Activity - 01 Journey To Industry 4.0: (Dept.: Electronics Maintenance/Utilities)Документ21 страницаProject/Activity - 01 Journey To Industry 4.0: (Dept.: Electronics Maintenance/Utilities)Arvind KumarОценок пока нет
- Technical Specifications: Enviropol Engineers Pvt. LTDДокумент17 страницTechnical Specifications: Enviropol Engineers Pvt. LTDArvind KumarОценок пока нет
- HMI Template en PDFДокумент37 страницHMI Template en PDFCao Minh ToànОценок пока нет
- InvoiceДокумент1 страницаInvoiceArvind KumarОценок пока нет
- 12Документ34 страницы12Rafael GagoОценок пока нет
- ASDA-B2 Anual PDFДокумент311 страницASDA-B2 Anual PDFALEXANDRU ZANOAGAОценок пока нет
- Project/Activity - 01 Journey To Industry 4.0: (Dept.: Electronics Maintenance/Utilities)Документ21 страницаProject/Activity - 01 Journey To Industry 4.0: (Dept.: Electronics Maintenance/Utilities)Arvind KumarОценок пока нет
- Proposal For Mpet Winding Machine-OEE CalculationДокумент3 страницыProposal For Mpet Winding Machine-OEE CalculationArvind KumarОценок пока нет
- CX Server RuntimeДокумент91 страницаCX Server RuntimeArvind KumarОценок пока нет
- Energy Council (Nov.-2021)Документ14 страницEnergy Council (Nov.-2021)Arvind KumarОценок пока нет
- Easy Start Guide LS IC5Документ15 страницEasy Start Guide LS IC5Arvind KumarОценок пока нет
- Exceutive Meet PresentationДокумент21 страницаExceutive Meet PresentationArvind KumarОценок пока нет
- Basic Drive Programing - PF753Документ68 страницBasic Drive Programing - PF753Arvind KumarОценок пока нет
- Manual JX PDFДокумент263 страницыManual JX PDFArvind KumarОценок пока нет
- Predialysis Education PresentationДокумент99 страницPredialysis Education PresentationArvind KumarОценок пока нет
- Acs 1Документ2 страницыAcs 1Arvind KumarОценок пока нет
- Drives ManualДокумент12 страницDrives ManualArvind KumarОценок пока нет
- 5 Allocation of Buffer Memories (BFM) 3 Installation and WiringДокумент8 страниц5 Allocation of Buffer Memories (BFM) 3 Installation and WiringArvind KumarОценок пока нет
- Introduction To Factorytalk View Software Tool.: LaboratoryДокумент24 страницыIntroduction To Factorytalk View Software Tool.: LaboratoryArvind KumarОценок пока нет
- Index 01Документ1 страницаIndex 01Arvind KumarОценок пока нет
- Io ListДокумент17 страницIo ListArvind KumarОценок пока нет
- New Microsoft PowerPoinPLC PRESENTATIONt PresentationДокумент16 страницNew Microsoft PowerPoinPLC PRESENTATIONt PresentationArvind KumarОценок пока нет
- Revised PLC Drawing 250812Документ14 страницRevised PLC Drawing 250812Arvind KumarОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- XCD 125-SPC 30-03-2011 ExportДокумент51 страницаXCD 125-SPC 30-03-2011 ExportWilly Mansilla AОценок пока нет
- Intze Tank MAIN PROJECT REPORT ON DESIGNДокумент75 страницIntze Tank MAIN PROJECT REPORT ON DESIGNHarsha DharmapalОценок пока нет
- SveДокумент28 страницSveseaqu3stОценок пока нет
- Membrane Pressure Relief Valves: VHS-CДокумент4 страницыMembrane Pressure Relief Valves: VHS-C88jdccОценок пока нет
- CDM (Slides + TD)Документ178 страницCDM (Slides + TD)bahaajaber35Оценок пока нет
- Slu Ce Structural June 2020 Problem SetДокумент9 страницSlu Ce Structural June 2020 Problem SetJonathan Basilio100% (1)
- Reinforcement DetailingДокумент47 страницReinforcement Detailingsomumallidi100% (1)
- Engine Oil ViscosityДокумент2 страницыEngine Oil Viscosityjhnbrry21803Оценок пока нет
- Wire Rope Hoist 2 TonДокумент5 страницWire Rope Hoist 2 Tonafrozashirahatti20Оценок пока нет
- TUDelft Clay Suction PDFДокумент8 страницTUDelft Clay Suction PDFDing LiuОценок пока нет
- TDS Motor ReprotДокумент14 страницTDS Motor ReprotSanju laaОценок пока нет
- Car SimulatorДокумент87 страницCar SimulatorJohn SiswantoОценок пока нет
- Inertia Dynamic TypeMPC SpecsheetДокумент2 страницыInertia Dynamic TypeMPC SpecsheetElectromateОценок пока нет
- Cement Lining of Pipes (Based On en 10298) : Dep SpecificationДокумент15 страницCement Lining of Pipes (Based On en 10298) : Dep Specificationeke23100% (1)
- Composite Structure Assignment 2 (D 200)Документ12 страницComposite Structure Assignment 2 (D 200)chehy084Оценок пока нет
- Physics Paper 1 DR Ken ChanДокумент19 страницPhysics Paper 1 DR Ken Chansuperpooh-1Оценок пока нет
- Tu RBO8Документ1 страницаTu RBO8AnkurTripathiОценок пока нет
- What Is Steam TracingДокумент4 страницыWhat Is Steam TracingahmadОценок пока нет
- Fluid Mechanics History EssayДокумент16 страницFluid Mechanics History EssayBorja MonDe YorkОценок пока нет
- Mazda 323f RelejiДокумент7 страницMazda 323f RelejimrgbbОценок пока нет
- Check List RodilloДокумент2 страницыCheck List RodilloDarwin Supò100% (1)
- Manual HaulotteДокумент82 страницыManual HaulotteRock Saybolt100% (3)
- FLUJO POR DIAMETRO TURBINA NuFlo - Liquid - Turbine PDFДокумент6 страницFLUJO POR DIAMETRO TURBINA NuFlo - Liquid - Turbine PDFOctavio CharryОценок пока нет
- Biland Sa-250: Technical SpecificationsДокумент4 страницыBiland Sa-250: Technical SpecificationsNofriagara Davit HarnawanОценок пока нет
- Massabo-Richiami FratturaДокумент53 страницыMassabo-Richiami FratturaTan ChingОценок пока нет
- Hull As A BeamДокумент17 страницHull As A BeamCemGülerОценок пока нет
- HP ChokesДокумент24 страницыHP Chokesghoulin01Оценок пока нет
- Formulas For Gear Calculation - External GearsДокумент10 страницFormulas For Gear Calculation - External GearsJag WaramОценок пока нет
- Tablas Mecanicas KR C2 PDFДокумент10 страницTablas Mecanicas KR C2 PDFarturoОценок пока нет